安瓿瓶旋转装置及配药机器人的制作方法
本发明涉及医疗设备,具体而言,涉及一种安瓿瓶旋转装置及配药机器人。
背景技术:
1、安瓿瓶作为静脉注射药液中重要药液容器之一,在自动配药过程,需要实现自动抽取瓶内药液。安瓿瓶为细长结构,在抽液时,安瓿瓶竖直放置,由于抽液针管针头存在坡口结构,自动抽液时坡口位置的药液不能抽取,容易造成瓶内残留药液过多,导致了药液的浪费。
技术实现思路
1、本发明提供了一种安瓿瓶旋转装置及配药机器人,以使抽液过程中安瓿瓶内的药液尽量多地完成抽取。
2、为了实现上述目的,根据本发明的一个方面,提供了一种安瓿瓶旋转装置,包括:夹具,所述夹具可移动地设置,所述夹具用于夹持安瓿瓶;驱动装置,可往返移动地设置,所述驱动装置具有连接位置和分离位置,所述驱动装置处于所述分离位置的情况下,所述驱动装置和所述夹具间隔开;所述驱动装置处于所述连接位置的情况下,所述驱动装置和所述夹具驱动连接,以驱动所述夹具和所述安瓿瓶旋转预设角度,其中,所述安瓿瓶旋转预设角度后,所述安瓿瓶的轴线相对于竖直方向倾斜。
3、进一步地,所述驱动装置包括支架、驱动部和传动组件,所述支架可往返移动地设置,所述驱动部和所述传动组件均设置在所述支架上,所述驱动部和所述传动组件驱动连接,所述传动组件驱动所述夹具转动。
4、进一步地,所述传动组件包括依次啮合的第一齿轮、第二齿轮和第三齿轮,所述第一齿轮设置在所述驱动部的驱动轴上,所述第二齿轮和所述第三齿轮均转动设置在所述支架上,其中,所述第三齿轮用于驱动所述夹具转动。
5、进一步地,所述驱动部包括电机、减速机、第一安装板和编码器,所述减速机和所述第一安装板均安装在所述支架上,所述电机和所述减速机驱动连接,所述减速机具有所述驱动轴,所述编码器的一端和所述第一安装板连接,所述编码器的另一端和所述驱动轴或所述第一齿轮连接。
6、进一步地,所述驱动装置还包括第二安装板和传感器,所述第二安装板安装在所述支架上,所述传感器安装在所述第二安装板上并朝向所述夹具,所述传感器用于检测所述夹具的位置。
7、进一步地,所述安瓿瓶旋转装置还包括直线运动部,所述驱动装置安装在所述直线运动部上,所述直线运动部带动所述驱动装置往返移动。
8、进一步地,所述直线运动部包括底座、导轨和滑座,所述底座固定设置,所述导轨固定在所述底座上,所述滑座和所述导轨滑动配合,所述驱动装置和所述滑座连接。
9、进一步地,所述直线运动部还包括电缸,所述电缸的缸体固定在所述底座上,所述电缸的缸杆和所述滑座或所述驱动装置连接。
10、进一步地,所述夹具包括夹持结构和设置在所述夹持结构上的从动轮,其中,所述夹持结构可整体转动地设置,所述夹持结构用于夹持所述安瓿瓶;所述驱动装置处于所述连接位置的情况下,所述驱动装置和所述从动轮驱动连接。
11、根据本发明的另一方面,提供了一种配药机器人,所述配药机器人包括机械手和上述的安瓿瓶旋转装置,所述机械手用于抽取所述安瓿瓶旋转装置的夹具上的安瓿瓶中的药液。
12、进一步地,所述配药机器人还包括转盘,所述安瓿瓶旋转装置包括多个所述夹具,所述转盘可转动地设置,多个所述夹具分布在所述转盘的周向,其中,任意一个所述夹具均可移动到和所述机械手对应的位置。
13、应用本发明的技术方案,提供了一种安瓿瓶旋转装置,包括:夹具,夹具可移动地设置,夹具用于夹持安瓿瓶;驱动装置,可往返移动地设置,驱动装置具有连接位置和分离位置,驱动装置处于分离位置的情况下,驱动装置和夹具间隔开;驱动装置处于连接位置的情况下,驱动装置和夹具驱动连接,以驱动夹具和安瓿瓶旋转预设角度,其中,安瓿瓶旋转预设角度后,安瓿瓶的轴线相对于竖直方向倾斜。在该方案中,通过夹具夹持安瓿瓶,在驱动装置与夹具间隔开的情况下,夹具通过移动输送安瓿瓶,在需要抽取药液时,驱动装置与夹具连接,通过驱动装置的动作带动夹具和安瓿瓶旋转预设角度,这样在抽取到安瓿瓶底部的药液时,安瓿瓶底部的药液汇集,并且液面尽量与针头的坡口匹配,从而能够最大限度地完成药液抽取,减少药液浪费。
技术特征:
1.一种安瓿瓶旋转装置,其特征在于,包括:
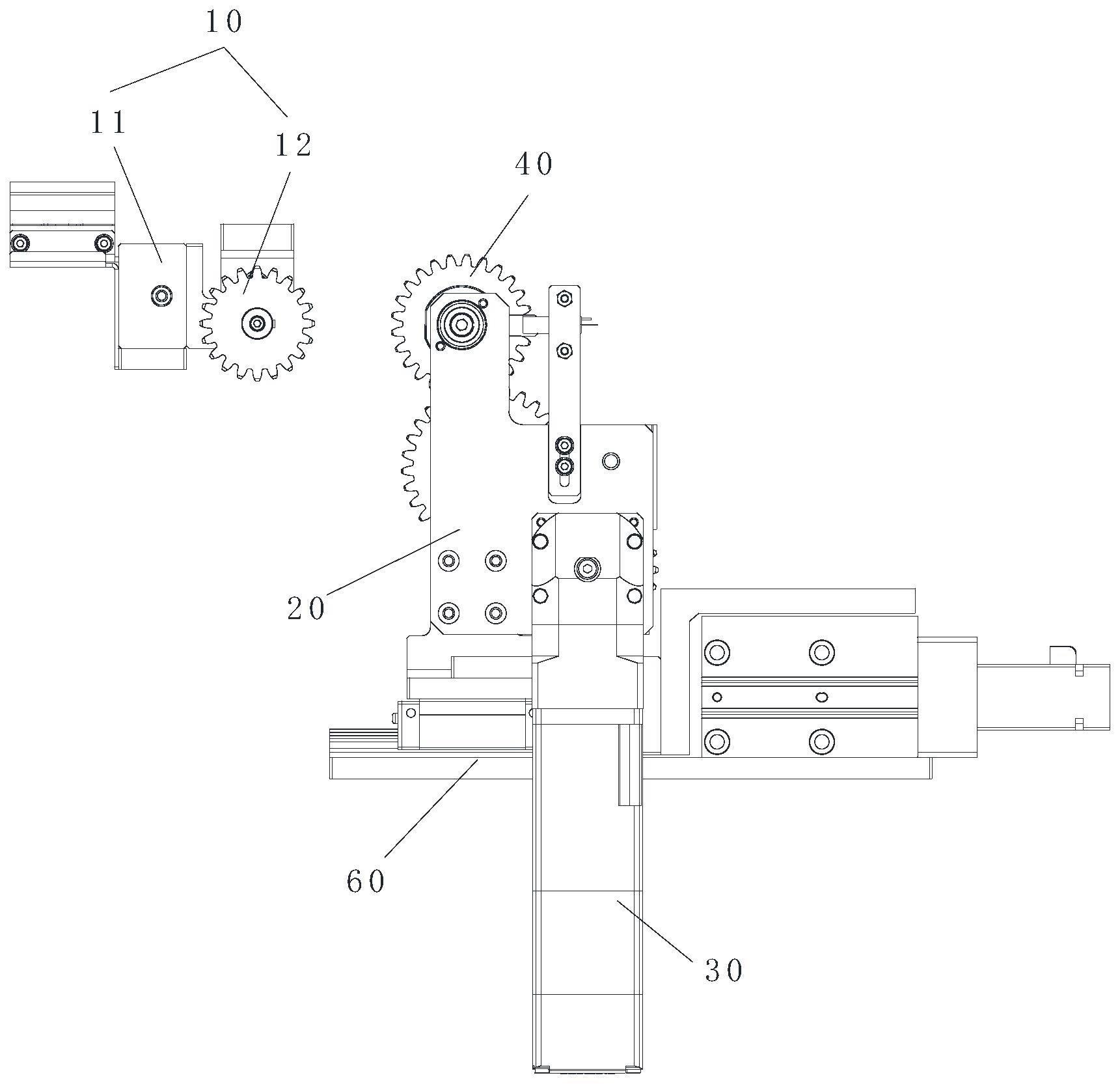
2.根据权利要求1所述的安瓿瓶旋转装置,其特征在于,所述驱动装置包括支架(20)、驱动部(30)和传动组件(40),所述支架(20)可往返移动地设置,所述驱动部(30)和所述传动组件(40)均设置在所述支架(20)上,所述驱动部(30)和所述传动组件(40)驱动连接,所述传动组件(40)驱动所述夹具(10)转动。
3.根据权利要求2所述的安瓿瓶旋转装置,其特征在于,所述传动组件(40)包括依次啮合的第一齿轮(41)、第二齿轮(42)和第三齿轮(43),所述第一齿轮(41)设置在所述驱动部(30)的驱动轴上,所述第二齿轮(42)和所述第三齿轮(43)均转动设置在所述支架(20)上,其中,所述第三齿轮(43)用于驱动所述夹具(10)转动。
4.根据权利要求3所述的安瓿瓶旋转装置,其特征在于,所述驱动部(30)包括电机(31)、减速机(32)、第一安装板(33)和编码器(34),所述减速机(32)和所述第一安装板(33)均安装在所述支架(20)上,所述电机(31)和所述减速机(32)驱动连接,所述减速机(32)具有所述驱动轴,所述编码器(34)的一端和所述第一安装板(33)连接,所述编码器(34)的另一端和所述驱动轴或所述第一齿轮(41)连接。
5.根据权利要求2所述的安瓿瓶旋转装置,其特征在于,所述驱动装置还包括第二安装板(51)和传感器(52),所述第二安装板(51)安装在所述支架(20)上,所述传感器(52)安装在所述第二安装板(51)上并朝向所述夹具(10),所述传感器(52)用于检测所述夹具(10)的位置。
6.根据权利要求1所述的安瓿瓶旋转装置,其特征在于,所述安瓿瓶旋转装置还包括直线运动部(60),所述驱动装置安装在所述直线运动部(60)上,所述直线运动部(60)带动所述驱动装置往返移动。
7.根据权利要求6所述的安瓿瓶旋转装置,其特征在于,所述直线运动部(60)包括底座(61)、导轨(62)和滑座(63),所述底座(61)固定设置,所述导轨(62)固定在所述底座(61)上,所述滑座(63)和所述导轨(62)滑动配合,所述驱动装置和所述滑座(63)连接。
8.根据权利要求7所述的安瓿瓶旋转装置,其特征在于,所述直线运动部(60)还包括电缸(64),所述电缸(64)的缸体固定在所述底座(61)上,所述电缸(64)的缸杆和所述滑座(63)或所述驱动装置连接。
9.根据权利要求1所述的安瓿瓶旋转装置,其特征在于,所述夹具(10)包括夹持结构(11)和设置在所述夹持结构(11)上的从动轮(12),其中,所述夹持结构(11)可整体转动地设置,所述夹持结构(11)用于夹持所述安瓿瓶;所述驱动装置处于所述连接位置的情况下,所述驱动装置和所述从动轮(12)驱动连接。
10.一种配药机器人,其特征在于,所述配药机器人包括机械手和权利要求1至9中任一项所述的安瓿瓶旋转装置,所述机械手用于抽取所述安瓿瓶旋转装置的夹具(10)上的安瓿瓶中的药液。
11.根据权利要求10所述的配药机器人,其特征在于,所述配药机器人还包括转盘,所述安瓿瓶旋转装置包括多个所述夹具(10),所述转盘可转动地设置,多个所述夹具(10)分布在所述转盘的周向,其中,任意一个所述夹具(10)均可移动到和所述机械手对应的位置。
技术总结
本发明提供了一种安瓿瓶旋转装置及配药机器人,安瓿瓶旋转装置包括:夹具,夹具可移动地设置,夹具用于夹持安瓿瓶;驱动装置,可往返移动地设置,驱动装置具有连接位置和分离位置,驱动装置处于分离位置的情况下,驱动装置和夹具间隔开;驱动装置处于连接位置的情况下,驱动装置和夹具驱动连接,以驱动夹具和安瓿瓶旋转预设角度,其中,安瓿瓶旋转预设角度后,安瓿瓶的轴线相对于竖直方向倾斜。需要抽取药液时,驱动装置与夹具连接,通过驱动装置的动作带动夹具和安瓿瓶旋转预设角度,这样在抽取到安瓿瓶底部的药液时,安瓿瓶底部的药液汇集,并且液面尽量与针头的坡口匹配,从而能够最大限度地完成药液抽取,减少药液浪费。
技术研发人员:王健,谭畅,刘超,张秀峰,秦绪亮
受保护的技术使用者:珠海格力智能装备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!