用于蛇形机器人的从动减震装置、蛇形机器人及其成套设备
本发明涉及蛇形机器人,特别是涉及一种用于蛇形机器人的从动减震装置、蛇形机器人及其成套设备。
背景技术:
1、现有的轮式蛇形机器人也存在在复杂地形运动时,容易出现受到颠簸而导致蛇形机器人内部机载设备受损的问题。
2、例如,中国专利cn216913829u公开了一种仿生蛇形机器人,包括蛇头部、躯干单元、蛇尾部;所述躯干单元一端与所述蛇头部连接,另一端与所述蛇尾部连接,所述躯干单元包括若干个关节机构,所述若干个关节机构串联连接,每个所述关节机构具有两种状态:断开状态和一体状态;所述关节机构包括连接装置、驱动装置、从动装置;所述从动装置包括外壳、若干个从动轮;所述外壳与所述连接装置的内壳固定连接且设置在内壳外侧,所述若干个从动轮与所述外壳固定连接且呈圆周阵列分布在所述外壳周围。然而,该专利的仿生蛇形机器在复杂地形运动时,其从动轮因地形复杂容易受到颠簸,容易导致外壳和外壳内的连接装置和驱动装置等机载设备受损。
3、例如,中国专利申请cn114536313a公开了一种可断开的蛇形机器人,包括躯干单元、蛇头单元、蛇尾单元、控制单元;所述躯干单元包括若干个相连的关节;每个所述关节包括连接机构、驱动机构;还公开了所述关节还包括从动单元,所述从动单元包括外壳和从动轮,所述外壳一端与所述内壳相连,另一端与相邻的关节的所述内壳相连;所述从动轮设置在所述外壳上。然而中国专利申请cn114536313a公开的一种可断开的蛇形机器人,作为轮式蛇形机器人在复杂地形运动时,其从动轮因复杂地形受到颠簸,容易导致外壳及外壳内的连接装置和驱动装置等机载设备受损。
技术实现思路
1、基于此,本发明的目的在于,提供一种用于蛇形机器人的从动减震装置、蛇形机器人及其成套设备。本发明所述的用于蛇形机器人的从动减震装置,具有良好的减震和缓冲作用,其应用于蛇形机器人中,相比于以往的轮式蛇形机器人,本发明的蛇形机器人运动速度大大提高、机动性增加,适应的地形范围更广。
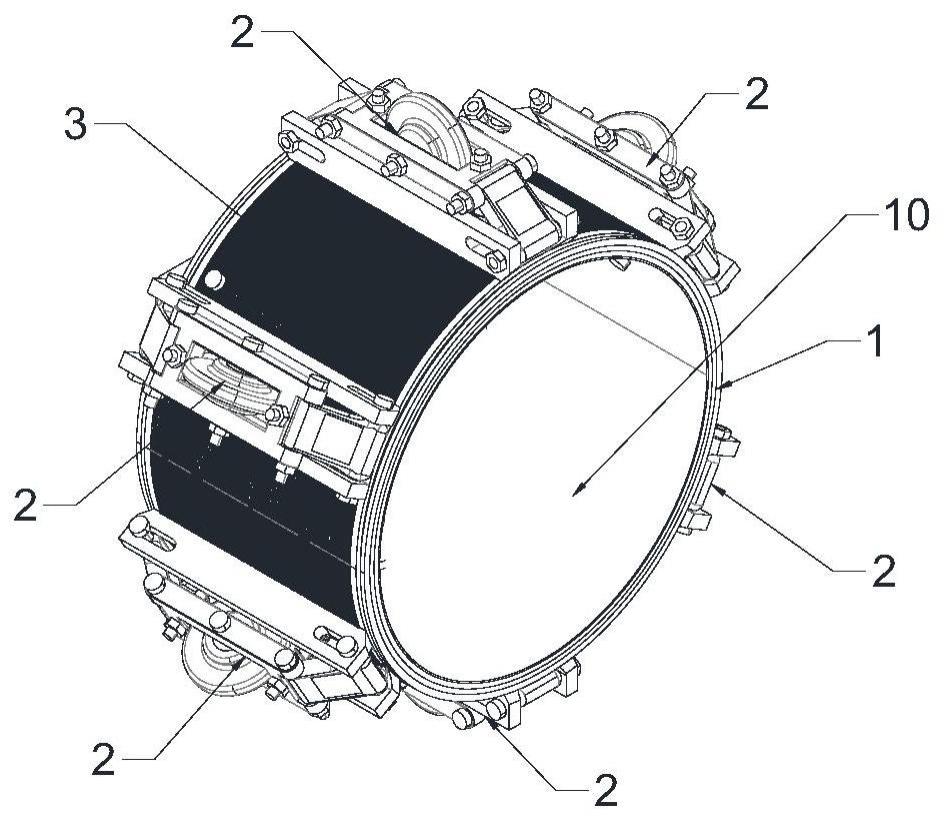
2、一种用于蛇形机器人的从动减震装置,包括圆柱形外壳、若干减震机构、线圈机构、第一电源、第一控制机构;
3、所述圆柱形外壳的两端开口;
4、所述若干减震机构均匀设置在所述圆柱形外壳的外周;每个减震机构包括两个连接板、两个第一连杆、两个磁铁、第二连杆、两个引导滑杆、两个弹性件、滑轮;所述两个连接板间隔并分别固定连接在所述圆柱形外壳的外周;所述两个连接板的两端的朝向与所述圆柱形外壳的轴向平行;所述两个连接板的两端均分别设有滑槽;所述两个连接板上还设有从一端向另一端排列的若干线圈孔,所述若干线圈孔位于所述滑槽和所述圆柱形外壳之间,且所述若干线圈孔靠近所述圆柱形外壳;所述两个第一连杆的一端的两侧分别与所述两个连接板的两端的两个滑槽卡合滑动铰接,使所述两个第一连杆的一端能够相互靠近或远离;所述两个磁铁分别内嵌在所述两个第一连杆的中部;所述第二连杆的两端分别与所述两个第一连杆的另一端铰接,所述第二连杆的中部设有容置槽;所述两个引导滑杆分别穿过所述第二连杆,且分别位于所述容置槽和所述第二连杆的两端之间;所述两个引导滑杆的一端分别与位于所述两个连接板之间的所述圆柱形外壳固接;所述两个引导滑杆的一端均设置有第一限位件,所述第一限位件位于所述圆柱形外壳的外侧且与所述圆柱形外壳相贴;所述两个引导滑杆的另一端均设置有第二限位件,所述第二限位件用于限制所述第二连杆脱离所述两个引导滑杆;所述两个弹性件分别套设在所述两个引导滑杆上,所述弹性件的两端分别与所述第一限位件、所述第二连杆抵接;所述滑轮设置在所述第二连杆的容置槽;
5、所述线圈机构包括第一线圈、第二线圈;所述第一线圈分别穿过所述若干减震机构的所述两个连接板的一端的若干线圈孔,并与位于所述圆柱形外壳的一端与相邻的引导滑杆的所述第一限位件之间的所述圆柱形外壳的外周贴合;所述第二线圈分别穿过所述若干减震机构的所述两个连接板的另一端的若干线圈孔,并与位于所述圆柱形外壳的另一端与相邻的引导滑杆的所述第一限位件之间的所述圆柱形外壳的外周贴合;
6、所述第一电源分别与所述第一线圈、所述第二线圈连接;
7、所述第一控制机构能够分别控制通入所述第一线圈、所述第二线圈的电流大小和方向。
8、本发明所述的用于蛇形机器人的从动减震装置,所述滑轮设置在所述第二连杆上,并通过所述两个连接板、所述两个第一连杆、所述两个引导滑杆和所述两个弹性件之间的连接使所述滑轮悬架在所述圆柱形外壳上,使所述滑轮与所述圆柱形外壳相隔,不与所述圆柱形外壳接触。当本发明所述的用于蛇形机器人的从动减震装置应用在蛇形机器人,在蛇形机器人的运动中所述滑轮贴合地形地面,若蛇形机器人在运动过程中受到冲击,所述从动减震装置的所述滑轮受力并按压所述第二连杆,使得与所述第二连杆的两端铰接的所述两个第一连杆的一端在所述两个连接板的所述滑槽上卡合滑动,并使所述两个第一连杆的一端在所述两个连接板上相互远离,同时所述两个弹性件受力压缩进行减震和缓冲;同时,所述第一线圈、所述第二线圈通电后分别与所述两个磁铁组成磁力阻尼器进行减震和缓冲;其中通过所述第二控制机构控制通入所述第一线圈、第二线圈的电流大小和方向,从而改变所述第一线圈、所述第二线圈分别与所述两个磁铁之间的磁力大小,产生可改变大小的阻尼力,阻碍所述第二连杆对所述两个第一连杆的下压,从而阻止第一所述第一连杆的一端在所述两个第一连接板的滑槽上滑动,从而对所述滑轮的受力按压进行减震和缓冲。
9、本发明所述的用于蛇形机器人的从动减震装置,在所述圆柱形外壳的外周均匀分布了若干减震机构,通过所述两个弹性件和磁力阻尼器,磁力阻尼器由所述两个磁铁和所述第一线圈、所述第二线圈组成,使所述蛇形机器人能够更好地着地,减震和缓冲效果更佳,当所述从动减震装置用于蛇形机器人能够让蛇形机器人能适应复杂地形,灵活完成像蛇一样的运动动作。所述两个弹性件在随地形冲击压缩或拉伸过程中形变产生弹簧力;同时在所述两个第一连杆内嵌的所述两个磁铁,在所述圆柱形外壳上的所述第一线圈、所述第二线圈通电下产生磁力的作用下,产生阻尼力,使得蛇形机器人能在复杂地形工况下工作。本发明所述的用于蛇形机器人的从动减震装置,所述滑轮能够在复杂地形环境中更好的贴合地面,防止因受到冲击或地形颠簸导致所述滑轮的受力直接作用于所述圆柱形外壳,导致所述圆柱形外壳内的机载设备或零部件受到损伤;使得蛇形机器人在复杂地形得适应性更强。
10、进一步地,所述若干减震机构为6个。
11、进一步地,所述弹性件为弹簧;所述弹性件为渐进式弹簧;所述渐进式弹簧的高度为25mm,中径为10mm;其中,以靠近所述第一限位件的一端为起始端,高度为0-15mm中弹簧圈间距均为2.2mm,高度为15-15.5mm中弹簧圈间距由2.2mm到4mm线性增大,高度为15.5-25mm中弹簧圈间距均为4mm。本发明自主设计了所述渐进式弹簧,靠近所述第一限位件的一端的弹簧较密集,靠近所述第二连杆的一端较稀疏,通过渐进式弹簧的设计,弹簧的弹性系数可改变,能够维持蛇形机器人的运动流畅稳定;另外,本发明设计的渐进式弹簧的弹性系数适中,当本发明所述的用于蛇形机器人的从动减震装置用于蛇形机器人中,可以使蛇形机器人避免出现振动频率过大,以及侧倾角、俯仰角过大而导致运动失衡,出现侧翻、推头(即转向力不足)等;同时本发明设计的所述渐进式弹簧变形量适中,能够保证蛇形机器人贴地行进的同时不致出现所述滑轮接触到所述圆柱形外壳外周的情况。
12、进一步地,所述线圈机构还包括第三线圈,所述第三线圈分别穿过所述若干减震机构的所述两个连接板中部的若干线圈孔,并与位于所述两个引导滑杆的所述第一限位件之间的所述圆柱形外壳的外周贴合;所述第一电源还与所述第三线圈连接;所述第一控制机构能够控制通入所述第三线圈的电流大小。所述第三线圈的设置,可以在所述第一线圈、第二线圈通电产生磁场的基础上,通过所述第三线圈通电进一步产生磁场,增强磁场强度;当所述用于蛇形机器人的从动减震装置应用在蛇形机器人中,在工况有需求时,所述第一线圈、第二线圈、第三线圈同时通电,通过所述第一控制机构分别控制改变所述第一线圈、第二线圈、第三线圈电流大小和方向,通过调节蛇形机器人的两个相邻关节的所述从动减震装置中通入所述第一线圈、第二线圈、第三线圈电流大小,改变在所述圆柱形外壳产生的磁场强度,使得在机器人运动过程中,两个相邻的关节间产生可变磁力,两个相邻关节之间的在所述圆柱形外壳上的所述线圈机构的线圈磁场力相互作用,产生关节间辅助动力,促进蛇形机器人加速运动。
13、进一步地,所述第一线圈、所述第二线圈、所述第三线圈的绕线方向均相同。
14、进一步地,所述滑轮的轮轴设置在所述容置槽的两侧的所述第二连杆的侧壁上,使所述滑轮的轮轴的两端方向相对垂直于所述第二连杆的两端的方向;所述滑轮远离所述圆柱形外壳的一端为所述减震机构距离所述圆柱形外壳的最远端;所述滑轮靠近所述圆柱形外壳的一端与所述圆柱形外壳间隔。所述滑轮远离所述圆柱形外壳的一端,即为与外界地形地面接触端,在运动时与外界地形地面接触;所述滑轮靠近所述圆柱形外壳的一端与所述圆柱形外壳间隔,即所述滑轮相对悬挂在所述圆柱形外壳上,不与所述圆柱形外壳直接接触。通过所述两个弹性件的减震和缓冲,所述两个磁铁和所述第一线圈、所述第二线圈的减震和缓冲,亦能使所述滑轮靠近所述圆柱形外壳的一端与所述圆柱形外壳间隔,不直接接触;防止因受到冲击或地形颠簸导致所述滑轮的受力直接作用于所述圆柱形外壳,导致所述圆柱形外壳内的机载设备或零部件受到损伤;使得蛇形机器人在复杂地形得适应性更强。
15、进一步地,所述第二连杆的长度短于所述两个连接板的长度,所述第二连杆与所述两个连接板相对平行设置,使所述两个连接板、所述两个第一连杆和所述第二连杆之间形成等腰梯形结构。
16、进一步地,所述圆柱形外壳为五层结构,从内到外包括第一绝缘层、电磁屏蔽层、第二绝缘层、磁芯层、第三绝缘层;所述电磁屏蔽层用于屏蔽磁场;所述磁芯层用于增强磁场强度。
17、进一步地,所述电磁屏蔽层为铁,所述磁芯层为磁铁,所述第一绝缘层、所述第二绝缘层、所述第三绝缘层均为绝缘材料。
18、所述第三绝缘层为承载结构件,所述第一线圈、所述第二线圈、所述第三线圈、所述若干减震机构均设置在所述第三绝缘层的外周。所述磁芯层作为所述第三绝缘层外的所述线圈机构的线圈的载体,能够在线圈通电时进一步增强磁场强度。所述第二绝缘层,不导电不通磁,隔绝所述电磁屏蔽层和所述磁芯层。所述电磁屏蔽层,能够屏蔽所述线圈机构的线圈产生的磁场,当所述从动减震装置用于蛇形机器人中,能够防止所述线圈机构产生的磁场对所述圆柱形外壳内的蛇形机器人中的电路造成干扰,保证蛇形机器人的内部电路正常运行。所述第一绝缘层隔绝所述电磁屏蔽层和所述第一绝缘层内的内部电路。
19、一种蛇形机器人,包括上述任一所述的用于蛇形机器人的从动减震装置。
20、进一步的,所述蛇形机器人包括躯干单元、蛇头部、蛇尾部;所述躯干单元一端与所述蛇头部连接,另一端与所述蛇尾部连接,所述躯干单元包括若干个关节机构,所述若干个关节机构串联连接,所述关节机构包括连接装置、驱动装置、权利要求1-6任一所述的用于蛇形机器人的从动减震装置;所述连接装置一端与所述驱动装置的一端固定连接,另一端与上一个相邻关节机构的驱动装置一端固定连接,权利要求1-6任一所述的用于蛇形机器人的从动减震装置的所述圆柱形外壳的内壁与所述连接装置的外周固定连接。
21、本发明的蛇形机器人,通过在每个关节机构的所述连接装置的外周设置本发明的所述从动减震装置,所述蛇形机器人依靠各关节机构的所述驱动装置扭转摆动,使得所述连接装置外周设置的所述从动减震装置上的所述滑轮与地形地面产生驱动力驱动蛇形机器人运动,本发明所述的用于蛇形机器人的从动减震装置,应用于蛇形机器人能够达到实现侧向运动、翻滚等蛇类运动的目的。在实现蛇形机器人的基本蛇类运动下,当所述驱动装置的驱动的扭矩不足或过载,地形摩擦系数与扭矩驱动力不匹配时,本发明的蛇形机器人可以通过调节两个相邻关节的通入所述线圈机构的线圈的电流大小,使得两个相邻的关节间产生可变磁力,执行包括缓冲保护圆柱形外壳内的连接装置和驱动装置,以及辅助驱动蛇形机器人运动的工作。通过所述从动减震装置的所述两个弹性件和磁力阻尼器,所述磁力阻尼器由所述两个磁铁和所述第一线圈、所述第二线圈组成,使所述蛇形机器人能够更好地着地,减震和缓冲效果更佳,使蛇形机器人能够让蛇形机器人能适应复杂地形,灵活完成像蛇一样的运动动作。
22、一种蛇形机器人成套设备,包括上述任一所述的蛇形机器人和磁力加速轨道系统;
23、所述磁力加速轨道系统包括两条轨带、第二电源、第二控制机构;所述两条轨带平行间隔设置,所述两条轨带均包括若干轨道单元,所述若干轨道单元排列形成轨带;上述任一所述的蛇形机器人设置在所述两条轨带之间;每个轨道单元均包括底座、轨道磁芯、轨道线圈,所述轨道磁芯设置在所述底座上,所述轨道磁芯的两端朝向与所述轨带的两端朝向相同;所述轨道线圈设置在所述轨道磁芯的外周;所述若干轨道单元的轨道线圈分别与所述第二电源连接;所述第二控制机构能够周期性改变通入所述轨道线圈的电流大小和方向。
24、所述磁力加速轨道系统适用于上述任一所述的蛇形机器人,当上述任一所述的蛇形机器人在所述磁力加速轨道系统上运动时,所述第二控制机构分别周期性改变通入若干轨道单元所述轨道线圈的电流大小和方向,从而改变所述若干轨道单元的磁场强度方向和所述轨道磁芯的南北极方向。通过调节所述蛇形机器人的若干个关节机构的所述的从动减震装置的所述第一控制机构控制通入所述第一线圈、所述第二线圈、第三线圈的电流大小,使所述蛇形机器人在每个关节机构通过每个轨道单元时,前一个轨道单元对所述圆柱形外壳产生拉力,后一个轨道单元对所述圆柱形产生推力,整个磁力加速轨道协调控制通入若干轨道单元的所述轨道线圈的电流大小和方向,实现蛇形机器人的平稳加速。
25、进一步地,所述轨道线圈的绕线方向,与所述第一线圈、所述第二线圈、所述第三线圈的绕线方向相同。
26、为了更好地理解和实施,下面结合附图详细说明本发明。
- 还没有人留言评论。精彩留言会获得点赞!