基于树莓派的仿人机器人灵巧手控制系统及方法与流程
1.本发明涉及一种机器人控制系统及方法,尤其涉及一种基于树莓派的仿人机器人灵巧手控制系统及方法。
背景技术:
2.仿人机器人是模仿人的形态和行为而设计制造的机器人,仿人机器人具有人类的外观,可以适应人类的生活和工作环境,代替人类完成各种作业,并可以在很多方面扩展人类的能力,在服务,医疗,教育,娱乐等多个领域得到广泛应用。由于人类对自身没有彻底地了解,以及现有的机器人技术和人工智能技术还不成熟,均限制了仿人机器人的发展。
3.树莓派(raspberry pi)是为学习计算机编程教育而设计,只有信用卡大小的微型电脑。其体积小巧,却具备所有pc的基本功能,若基于树莓派设计一款用于机器人的控制系统,能够使得机器人也相应的小巧、轻便和动作灵活,目前市面上暂无基于树莓派的仿人实体机器人的控制系统,整个机器人的控制系统架构的搭建存在较大的难度。因此,需要提供一种基于树莓派开发的仿人实体机器人的灵巧手控制系统及方法,用于实现仿人机器人的手掌的整体控制。
技术实现要素:
4.本发明的目的在于提供一种基于树莓派的仿人机器人灵巧手控制系统及方法,基于树莓派开发仿人机器人的灵巧手控制系统,实现仿人机器人的手掌的整体控制。
5.本发明是这样实现的:
6.一种基于树莓派的仿人机器人灵巧手控制系统,基于树莓派搭建仿人机器人灵巧手的控制系统架构,该控制系统架构包括采集层、传输层、控制层、执行层和物理层;采集层的输出端与传输层的输入端连接,传输层的输出端与控制层的输入端连接,控制层的输出端与执行层的输入端连接,执行层的反馈端与控制层的输入端连接,执行层的输出端与物理层的输入端连接,物理层的反馈端与执行层的输入端连接。
7.一种基于树莓派的仿人机器人灵巧手控制系统的控制方法,包括以下步骤:
8.步骤1:采集层采集人体手臂肌电信息,并将人体手臂肌电信息进行数据处理后传输至传输层;
9.步骤2:传输层接收采集层传输的人体手臂肌电信息,并将人体手臂肌电信息进行数据处理后传输至控制层;
10.步骤3:控制层接收传输层传输的人体手臂肌电信息,将人体手臂肌电信息进行解析并选取匹配的动作模型,控制层将动作模型传输至执行层;
11.步骤4:执行层接收控制层传输的动作模型,并将该动作模型对应的动作结果输出至物理层,同时将数据反馈信息输出到控制层;
12.步骤5:物理层接收执行层传输的动作结果,物理层分解该动作结果并执行该动作结果,同时将手掌物理数据反馈至执行层。
13.所述的采集层包括人体手臂肌电信息采集模组和数据过滤模块,步骤1包括以下分步骤:
14.步骤1.1:采集层监听人体手臂肌电信息,若采集层监听到人体手臂肌电信息,则执行步骤1.2,若采集层未监听到人体手臂肌电信息,则继续监听;
15.步骤1.2:人体手臂肌电信息采集模组采集人体手臂肌电原始数据,并将人体手臂肌电原始数据采集至数据过滤模块;
16.步骤1.3:数据过滤模块对人体手臂肌电原始数据进行滤波处理,过滤异常数据;
17.步骤1.4:数据过滤模块将过滤后的人体手臂肌电原始数据输出至传输层。
18.所述的传输层包括数据格式化模块、协议封装模块和总线传输模块;步骤2包括以下分步骤:
19.步骤2.1:传输层监听由采集层进行数据处理后的人体手臂肌电信息,若传输层监听到人体手臂肌电信息,则执行步骤2.2,若传输层未监听到人体手臂肌电信息,则继续监听;
20.步骤2.2:数据格式化模块将数据处理后的人体手臂肌电信息进行数据格式化处理;
21.步骤2.3:协议封装模块对数据格式化处理后的人体手臂肌电信息进行协议封装;
22.步骤2.4:总线传输模块将协议封装后的人体手臂肌电信息传输至控制层。
23.所述的数据格式化模块的肌电信息协议数据结构为m=[id1,ti,k],其中,m为肌电信息协议数据结构,id1为肌电传感器的编号,ti为人体手臂肌电信息的采集时间点,k为肌电传感器的数值。
[0024]
所述的控制层包括肌电数据接收模块、肌电数据分析模块、肌电数据反馈分析模块、动作算法计算模块和动作库训练模块;步骤3包括以下分步骤:
[0025]
步骤3.1:控制层监听由传输层进行数据处理后的人体手臂肌电信息,若控制层监听到人体手臂肌电信息,则执行步骤3.2,若控制层未监听到人体手臂肌电信息,则继续监听;
[0026]
步骤3.2:肌电数据接收模块接收由传输层进行数据处理后的人体手臂肌电信息,并对人体手臂肌电信息进行数据协议解析,肌电数据接收模块将解析后的人体手臂肌电信息传输至肌电数据分析模块;
[0027]
步骤3.3:肌电数据分析模块对人体手臂肌电信息进行高通滤波和低通滤波,得到人体手臂肌电数据,并将人体手臂肌电数据传输至动作算法计算模块;
[0028]
步骤3.4:动作算法计算模块内根据人体生物电肌电模型建立生物电反射模型,人体手臂肌电数据输入动作算法计算模块的生物电反射模型,生物电反射模型输出动作数据,动作算法计算模块将动作数据传输至动作库训练模块;
[0029]
肌电数据分析模块同时通过数据反馈分析模块接收由执行层输出的反馈信息,肌电数据分析模块结合人体手臂肌电信息和反馈信息进行高阶滤波和数据筛选,获得人体手臂肌电数据;
[0030]
步骤3.5:动作库训练模块内存储预先训练好的动作模型,动作库训练模块根据动作数据选取与该动作数据匹配的动作模型,并将该动作模型传输至执行层。
[0031]
所述的执行层包括动作执行模块和数据反馈模块,步骤4包括以下分步骤:
[0032]
步骤4.1:执行层监听由控制层传输的动作模型,若执行层监听到动作模型,则执行步骤4.2,若执行层未监听到动作模型,则继续监听;
[0033]
步骤4.2:动作执行模块接收控制层传输的动作模型,动作执行模块将动作模型解析为动作结果,并将动作结果输出到物理层;
[0034]
步骤4.3:数据反馈模块将反馈信息输出到控制层的肌电数据分析模块。
[0035]
所述的动作结果的元动作协议数据结构是d=[id,ti,d],其中,d为元动作协议数据结构,id为物理层的执行器编号,ti为执行器运行到当前角度的时间点,d为执行器当前运行的角度值。
[0036]
所述的物理层包括手腕执行器、大拇指执行器,食指执行器、中指执行器、无名指执行器和小拇指执行器;其中,手腕执行器包括第一弯曲执行器、第一里外执行器和第一左右执行器;大拇指执行器包括第二弯曲执行器和第二里外执行器;食指执行器包括第三弯曲执行器和第二左右执行器;中指执行器为第四弯曲执行器,无名指执行器为第五弯曲执行器,小拇指执行器为第六弯曲执行器;
[0037]
手腕执行器、大拇指执行器,食指执行器、中指执行器、无名指执行器和小拇指执行器的元动作分别是:手腕元动作e1、大拇指元动作e2、食指元动作e3、中指元动作e4、无名指元动作e5、小指元动作e6;手掌动作数据结构是:e=[e1,e2,e3,e4,e5,e6],其中,e为手掌动作;
[0038]
通过个体执行器执行和联合执行器执行实现手掌动作,个体执行器执行时,单个执行器的元动作执行数据结构为b=[id,ti,d,v,a],其中,b为单个执行器的元动作执行数据结构,id为执行器编号,ti为执行器运行到当前角度的终止时间点,d为执行器当前角度,v为执行器当前速度,a为执行器当前加速度;
[0039]
联合执行器执行时,五指元动作执行数据结构为c=[i,bn],其中,c为五指的各自联合动作,i为五指编号,bn为各个手指所包含的一个或多个执行器的当前信息;
[0040]
灵巧手的整体元动作数据结构为n=[ti,cn],其中,n为联合动作,ti为联合动作的时间序列,cn为五个手指的当前信息。
[0041]
所述的步骤5包括以下分步骤:
[0042]
步骤5.1:物理层监听由执行层传输的动作结果,若物理层监听到动作结果,则执行步骤5.2,若物理层未监听到动作结果,则继续监听;
[0043]
步骤5.2:物理层将动作结果分解为五个手指和手腕的元动作,并通过手腕执行器、大拇指执行器,食指执行器、中指执行器、无名指执行器和小拇指执行器分别执行相应的元动作;
[0044]
步骤5.3:物理层获取手掌物理数据并将其反馈至执行层。
[0045]
本发明与现有技术相比,具有以下有益效果:
[0046]
1、本发明由于基于树莓派设计开发仿人机器人灵巧手控制系统,弥补了目前没有基于树莓派的仿人机器人灵巧手控制系统的技术空白,实现了仿人机器人灵巧手的整体控制。
[0047]
2、本发明将采集到的人体手臂肌电信息分解成为手腕和五个手指的元动作,并由手腕和五个手指的各个执行器分别执行弯曲、里外移动、左右移动等元动作,元动作的执行数据包括动作时间点、角度、速度、加速度等,并结合闭环控制,实现对整个手掌的灵活、精
细控制,从而使仿人机器人灵巧手能精准的实现仿人动作,用于替代人体执行相应动作。
附图说明
[0048]
图1是本发明基于树莓派的仿人机器人灵巧手控制系统的框架图;
[0049]
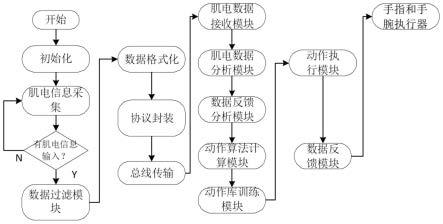
图2是本发明基于树莓派的仿人机器人灵巧手控制方法的流程图;
[0050]
图3是本发明基于树莓派的仿人机器人灵巧手控制方法中步骤1的流程图;
[0051]
图4是本发明基于树莓派的仿人机器人灵巧手控制方法中步骤2的流程图;
[0052]
图5是本发明基于树莓派的仿人机器人灵巧手控制方法中步骤3的流程图;
[0053]
图6是本发明基于树莓派的仿人机器人灵巧手控制方法中步骤4的流程图;
[0054]
图7是本发明基于树莓派的仿人机器人灵巧手控制方法中步骤5的流程图;
[0055]
图8是本发明基于树莓派的仿人机器人灵巧手控制方法中灵巧手的运行状态图;
[0056]
图9是本发明基于树莓派的仿人机器人灵巧手控制系统中物理层的执行器分配图;
[0057]
图10是本发明基于树莓派的仿人机器人灵巧手控制系统中体手臂肌电信息采集模组的工作流程图;
[0058]
图11是本发明基于树莓派的仿人机器人灵巧手控制系统中数据过滤模块的工作流程图;
[0059]
图12是本发明基于树莓派的仿人机器人灵巧手控制系统中肌电数据分析模块的工作流程图。
[0060]
图中,1采集层,11人体手臂肌电信息采集模组,12数据过滤模块,2传输层,21数据格式化模块,22协议封装模块,23总线传输模块,3控制层,31肌电数据接收模块,32肌电数据分析模块,33肌电数据反馈分析模块,34动作算法计算模块,35动作库训练模块,4执行层,41动作执行模块,42数据反馈模块,5物理层,51手腕执行器,511第一弯曲执行器,512第一里外执行器,513第一左右执行器,52大拇指执行器,521第二弯曲执行器,522第二里外执行器,53食指执行器,531第三弯曲执行器,532第二左右执行器,55无名指执行器,54中指执行器,56小拇指执行器。
具体实施方式
[0061]
下面结合附图和具体实施例对本发明作进一步说明。
[0062]
请参见附图1,一种基于树莓派的仿人机器人灵巧手控制系统,基于树莓派搭建仿人机器人灵巧手的控制系统架构,该控制系统架构包括采集层1、传输层2、控制层3、执行层4和物理层5;采集层1的输出端与传输层2的输入端连接,传输层2的输出端与控制层3的输入端连接,控制层3的输出端与执行层4的输入端连接,执行层4的反馈端与控制层3的输入端连接,执行层4的输出端与物理层5的输入端连接,物理层5的反馈端与执行层4的输入端连接。
[0063]
请参见附图1和附图2,一种基于树莓派的仿人机器人灵巧手控制方法,包括以下步骤:
[0064]
步骤1:采集层1采集人体手臂肌电信息,并将人体手臂肌电信息进行数据处理后传输至传输层2。
[0065]
请参见附图1和附图3,所述的采集层1包括人体手臂肌电信息采集模组11和数据过滤模块12,步骤1包括以下分步骤:
[0066]
步骤1.1:采集层1监听人体手臂肌电信息,若采集层1监听到人体手臂肌电信息,则执行步骤1.2,若采集层1未监听到人体手臂肌电信息,则继续监听。
[0067]
步骤1.2:人体手臂肌电信息采集模组11通过肌电传感器组采集人体手臂肌电原始数据,并将人体手臂肌电原始数据采集至数据过滤模块12。
[0068]
请参见附图10,优选的,人体手臂肌电信息采集模组11可包括六个医疗干电极、导线、绑带、stm32处理器、输出线、电源和开关,六个医疗干电极通过绑带固定在手臂的腕部和手指关节处并贴紧皮肤表面,打开开关,电源为六个医疗干电极供电,使六个医疗干电极采集腕部和手指动作信息,即人体手臂肌电原始数据,并通过导线将其传输至stm32处理器,stm32处理器通过输出线输出人体手臂肌电原始数据。
[0069]
步骤1.3:数据过滤模块12对人体手臂肌电原始数据进行滤波处理,过滤异常数据。
[0070]
请参见附图11,优选的,数据过滤模块12包括电容电阻和电感,对人体手臂肌电原始数据进行高通滤波和低通滤波处理。
[0071]
优选的,异常数据包括明显高于或低于正常人体肌电信号的数据,即不在正常人体肌电数据范围(0~1.5mv)内的数据。
[0072]
正常人体肌电的数据的特点是:人体肌电信号是一维时间动作电位序列,可采用交流信号表示,其幅值一般和肌肉运动力度成正比,其幅值在0~1.5mv,也可采用信号频率表示,其频率范围是0~500hz,主要能量集中在20~150hz。
[0073]
人体肌电信号通常比肢体运动超前30-150ms产生,因此可利用采集到的人体手臂肌电原始数据对运动进行提前判断。
[0074]
步骤1.4:数据过滤模块12将过滤后的人体手臂肌电原始数据输出至传输层2。
[0075]
步骤2:传输层2接收采集层1传输的人体手臂肌电信息,并将人体手臂肌电信息进行数据处理后传输至控制层3。
[0076]
请参见附图1和附图4,所述的传输层2包括数据格式化模块21、协议封装模块22和总线传输模块23;步骤2包括以下分步骤:
[0077]
步骤2.1:传输层2监听由采集层1进行数据处理后的人体手臂肌电信息,若传输层2监听到人体手臂肌电信息,则执行步骤2.2,若传输层2未监听到人体手臂肌电信息,则继续监听。
[0078]
步骤2.2:数据格式化模块21将数据处理后的人体手臂肌电信息进行数据格式化处理。
[0079]
所述的数据格式化模块21的肌电信息协议数据结构为m=[id1,ti,k],其中,m为肌电信息协议数据结构,id1为肌电传感器的编号,ti为人体手臂肌电信息的采集时间点,k为肌电传感器的数值。
[0080]
数据格式化模块21接收到的人体手臂肌电信息为浮点型数据,数据格式化模块21将人体手臂肌电信息做放大处理形成整型数据,优选的,可将人体手臂肌电信息放大1000倍,也可根据实际需求进行放大处理,便于后期的计算。
[0081]
步骤2.3:协议封装模块22对数据格式化处理后的人体手臂肌电信息进行协议封
装。
[0082]
封装的协议包括:执行器编号id、终止时间点ti、数据k和校验值sum。通过协议封装将处理后的数据进行打包处理,便于数据的打包发送,提高传输效率。
[0083]
步骤2.4:总线传输模块23将协议封装后的人体手臂肌电信息通过总线传输至控制层3。
[0084]
总线(bus)是计算机组件间规范化的交换数据(data)的方式,即以一种通用的方式为各组件提供数据传送和控制逻辑。
[0085]
步骤3:控制层3接收传输层2传输的人体手臂肌电信息,将人体手臂肌电信息进行解析并选取匹配的动作模型,控制层3将动作模型传输至执行层4。
[0086]
请参见附图1和附图5,所述的控制层3包括肌电数据接收模块31、肌电数据分析模块32、肌电数据反馈分析模块33、动作算法计算模块34和动作库训练模块35;步骤3包括以下分步骤:
[0087]
步骤3.1:控制层3监听由传输层2进行数据处理后的人体手臂肌电信息,若控制层3监听到人体手臂肌电信息,则执行步骤3.2,若控制层3未监听到人体手臂肌电信息,则继续监听。
[0088]
步骤3.2:肌电数据接收模块31接收由传输层2进行数据处理后的人体手臂肌电信息,并对人体手臂肌电信息进行数据协议解析,肌电数据接收模块31将解析后的人体手臂肌电信息传输至肌电数据分析模块32。
[0089]
优选的,肌电数据接收模块31可采用串口接收器,肌电数据接收模块31接收人体手臂肌电信息后解析协议流程,即将接收到的人体手臂肌电信息按照上述封装协议(即电机编号id、相对时间ti、数据k和校验值sum)进行解析,获取各个单独的数据项。
[0090]
步骤3.3:肌电数据分析模块32对人体手臂肌电信息进行高通滤波和低通滤波,得到人体手臂肌电数据,并将人体手臂肌电数据传输至动作算法计算模块34。
[0091]
高通滤波器允许信号中的高频或者交流分量通过,抑制低频或者直流分量的滤波器,用于筛选人体手臂肌电信息中的高频数据。低通滤波器允许信号中的低频或者直流分量通过,抑制高频分量或者干扰和噪音的滤波器,用于筛选人体手臂肌电信息中的低频数据。
[0092]
所述的肌电数据分析模块32同时通过数据反馈分析模块33接收由执行层4的数据反馈模块42输出的反馈信息,肌电数据分析模块32结合人体手臂肌电信息和反馈信息进行高阶滤波和数据筛选,获得人体手臂肌电数据。
[0093]
请参见附图12,肌电数据分析模块32由肌电数据输入模块、筛选模组和结果输出模块,其数据筛选流程是:肌电数据输入模块接收上述经过简单处理(即高通滤波和低通滤波)后的人体手臂肌电数据,设置人体手臂肌电数据的高阈值和低阈值,筛选模组分别剔除超过高阈值和低阈值的人体手臂肌电数据,可分离出多个通道的人体手臂肌电数据,最后由结果输出模块输出筛选后的人体手臂肌电数据。
[0094]
步骤3.4:动作算法计算模块34内根据人体生物电肌电模型建立生物电反射模型,人体手臂肌电数据输入动作算法计算模块34的生物电反射模型,生物电反射模型输出动作数据,动作算法计算模块34将动作数据传输至动作库训练模块35。
[0095]
人体生物肌电模型根据采集六路肌电信息,分别对不同动作下的六路肌电信息进
行一个y[i]=a[i]x[i](0《=i《=6)建模,该模型的训练方法为:对特定动作下的a[i]进行计算取均值,得到生物电反射模型。生物电反射模型的建模和训练可基于现有技术的rnn、cnn等神经网络实现。
[0096]
步骤3.5:动作库训练模块35内存储预先训练好的动作模型,动作库训练模块35根据动作数据选取与该动作数据匹配的动作模型,并将该动作模型传输至执行层4。
[0097]
动作库训练模块35由六路肌电输入模块、因子计算模块和结果输出模块组成。其工作流程为:六路肌电输入模块接收六路肌电数据输入,采用步骤3.4中动作算法计算模块34的算法计算匹配因子b,当0.5≤b≤1时,则认为动作匹配,动作库训练模块35输出1。动作库训练模块35的输出结果为0或1,其中,0表示不匹配,1表示匹配。
[0098]
步骤4:执行层4接收控制层3传输的动作模型,并将该动作模型对应的动作结果输出至物理层5,同时将数据反馈信息输出到控制层3。
[0099]
请参见附图1和附图6,所述的执行层4包括动作执行模块41和数据反馈模块42,步骤4包括以下分步骤:
[0100]
步骤4.1:执行层4监听由控制层3传输的动作模型,若执行层4监听到动作模型,则执行步骤4.2,若执行层4未监听到动作模型,则继续监听。
[0101]
步骤4.2:动作执行模块41接收控制层3传输的动作模型,动作执行模块41将动作模型解析为动作结果,并将动作结果输出到物理层5。
[0102]
动作执行模块41包括大拇指执行模块、食指执行模块、中指执行模块、无名指执行模块和小指执行模块,单个执行模块由动作结果输入模块和动作执行输出模块即电机或舵机底层驱动组成。单个执行模块的工作流程为:动作结果输入模块接收到动作结果输入后,动作执行输出模块根据结果输出硬件信号。各个执行模块分别输出大拇指、食指、中指、无名指、小指对应的硬件信号,便于分别控制大拇指、食指、中指、无名指、小指。
[0103]
所述的动作结果的元动作协议数据结构是d=[id,ti,d],其中,d为元动作协议数据结构,id为物理层5的执行器编号,ti为执行器运行到当前角度的时间点,d为执行器当前运行的角度值,物理层5的执行器可优选为舵机或电机。
[0104]
步骤4.3:数据反馈模块42将反馈信息输出到控制层3的肌电数据分析模块32。
[0105]
数据反馈模块42反馈信息中包含大拇指、食指、中指、无名指和小指动作执行是否完成的信息,可用于在生物电反射模型的动作训练中查看动作训练是否完成的标识,从而便于对生物电反射模型进行训练优化。
[0106]
步骤5:物理层5接收执行层4传输的动作结果,物理层5分解该动作结果并通过执行器执行该动作结果,同时将手掌物理数据反馈至执行层4。
[0107]
请参见附图9,所述的物理层5包括手腕执行器51、大拇指执行器52,食指执行器53、中指执行器54、无名指执行器55和小拇指执行器56;其中,手腕执行器51包括第一弯曲执行器511、第一里外执行器512和第一左右执行器513;大拇指执行器52包括第二弯曲执行器521和第二里外执行器522;食指执行器53包括第三弯曲执行器531和第二左右执行器532;中指执行器54为第四弯曲执行器,无名指执行器55为第五弯曲执行器,小拇指执行器56为第六弯曲执行器。
[0108]
手掌各个关节的执行器根据功能不同进行不同分配,所述的手腕执行器51、大拇指执行器52,食指执行器53、中指执行器54、无名指执行器55和小拇指执行器56的元动作主
要有:手腕元动作e1、大拇指元动作e2、食指元动作e3、中指元动作e4、无名指元动作e5、小指元动作e6。手掌动作数据结构主要是根据上述元动作的执行数据结构来制定,通过个体执行器执行和联合执行器执行实现手掌各个执行器的动作,从而达到手掌动作的效果。手掌动作数据结构是:e=[e1,e2,e3,e4,e5,e6],其中,e为手掌动作。
[0109]
所述的个体执行器执行时,单个执行器的元动作执行数据结构为b=[id,ti,d,v,a],其中,b为单个执行器的元动作执行数据结构,id为执行器编号,ti为执行器运行到当前角度的终止时间点,d为执行器当前角度,v为执行器当前速度,a为执行器当前加速度。
[0110]
所述的联合执行器执行时,五指元动作执行数据结构为c=[i,bn],其中,c为五指的各自联合动作,i为五指编号(大拇指至小拇指依次编号为1~5),bn为各个手指所包含的一个或多个执行器的当前信息。
[0111]
灵巧手的整体元动作数据结构为n=[ti,cn],其中,n为联合动作,ti为联合动作的时间序列,cn为五个手指的当前信息。
[0112]
请参见附图8,所述的灵巧手的运行状态包括ready(就绪态)、running(运行态)、stop(停止态)、error(异常态)和status(查询态)。
[0113]
1.ready(就绪态),即仿人机器人灵巧手控制系统当前进程处于准备就绪状态,在就绪态下可以分别进入到运行态或者查询态,其中,就绪态的输入状态只能是停止态,同时在无任何输入情况下,就绪态可以一直自我保持。
[0114]
2.running(运行态),即仿人机器人灵巧手控制系统当前进程处于运行状态,在运行态下向前只能进入到停止态,运行态的输入状态只能是就绪态,在运行态下可以持续进行自我保持,直到进入下一个状态。
[0115]
3.stop(停止态),即仿人机器人灵巧手控制系统当前进程处于停止运行状态,在停止态下向前只能进入到就绪态,停止态的输入状态可以是查询态或运行态。
[0116]
4.error(异常态),即仿人机器人灵巧手控制系统当前进程处于异常状态,在异常态下向前只能进入到停止态,异常态的输入状态是运行态。
[0117]
5.status(查询态),即仿人机器人灵巧手控制系统当前进程处于系统状态查询的状态,在查询态下向前只能进入到停止态,查询态的输入状态只能是就绪态。
[0118]
请参见附图1和附图7,所述的步骤5包括以下分步骤:
[0119]
步骤5.1:物理层5监听由执行层4传输的动作结果,若物理层5监听到动作结果,则执行步骤5.2,若物理层5未监听到动作结果,则继续监听。
[0120]
步骤5.2:物理层5将动作结果分解为五个手指和手腕的元动作,并通过手腕执行器51、大拇指执行器52,食指执行器53、中指执行器54、无名指执行器55和小拇指执行器56分别执行相应的元动作。
[0121]
优选的,手腕执行器51、大拇指执行器52,食指执行器53、中指执行器54、无名指执行器55和小拇指执行器56可采用电机或舵机,在接收到动作结果并分解得到元动作后,驱动电机或舵机根据元动作进行转动。
[0122]
手腕执行器51可根据元动作执行弯曲动作、左右移动、里外移动,大拇指执行器52、食指执行器53、中指执行器54、无名指执行器55和小拇指执行器56均可根据元动作执行弯曲动作,大拇指执行器52还可根据元动作执行里外移动,食指执行器53还可根据元动作执行左右移动,从而根据不同的元动作组合实现对整个灵巧手的动作控制。
[0123]
步骤5.3:物理层5获取手掌物理数据并将其反馈至执行层4。
[0124]
手掌物理数据主要包含电机或舵机的角度数据信息,手掌物理数据可通过串口线通讯方式从手腕执行器51、大拇指执行器52,食指执行器53、中指执行器54、无名指执行器55和小拇指执行器56中获取。
[0125]
物理层5将采集到的手掌物理数据继续反馈至执行层4,再由执行层4的数据反馈模块42继续反馈至控制层3的数据反馈分析模块33,从而使控制层3能够准确判断到物理手掌动作是否执行到位。
[0126]
以上仅为本发明的较佳实施例而已,并非用于限定发明的保护范围,因此,凡在本发明的精神和原则之内所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1