抓取设备的高度确定方法、装置、计算机设备及存储介质与流程
本发明涉及定位领域,尤其涉及一种抓取设备的高度确定方法、装置、计算机设备及存储介质。
背景技术:
1、随着机器人技术的快速发展,机器手等自动化抓取设备被广泛应用于工业生产中。可通过抓取设备快速抓取并堆叠原料零件,提高工业生产的效率。由于抓取设备本身无法主动确定堆叠原料零件时的抓取高度,需要技术人员通过示教器输入示教点位至抓取设备,以调试抓取设备的抓取高度,进而使得抓取设备能够根据示教的点位抓取并堆叠原料零件。
2、在堆叠电芯构成电池组的场景中,还需要通过抓取设备堆叠泡棉和隔壁等其他的物料,电芯和每种物料的高度均会存在区别,导致需要通过示教器输入多个示教点位至抓取设备。同时,人工示教的点位还容易出现误差,影响电芯的堆叠效果。此外,当堆叠过程中物料的类型发生变化或物料高度发生变化时,则需要重新通过示教器输入示教点位至抓取设备,进而导致了抓取设备的调试效率低下。
技术实现思路
1、有鉴于此,本发明提供一种抓取设备的高度确定方法、装置、计算机设备及存储介质,用于改善抓取设备的调试效率低下的现状。
2、第一方面,本发明实施例提供一种抓取设备的高度确定方法,包括:
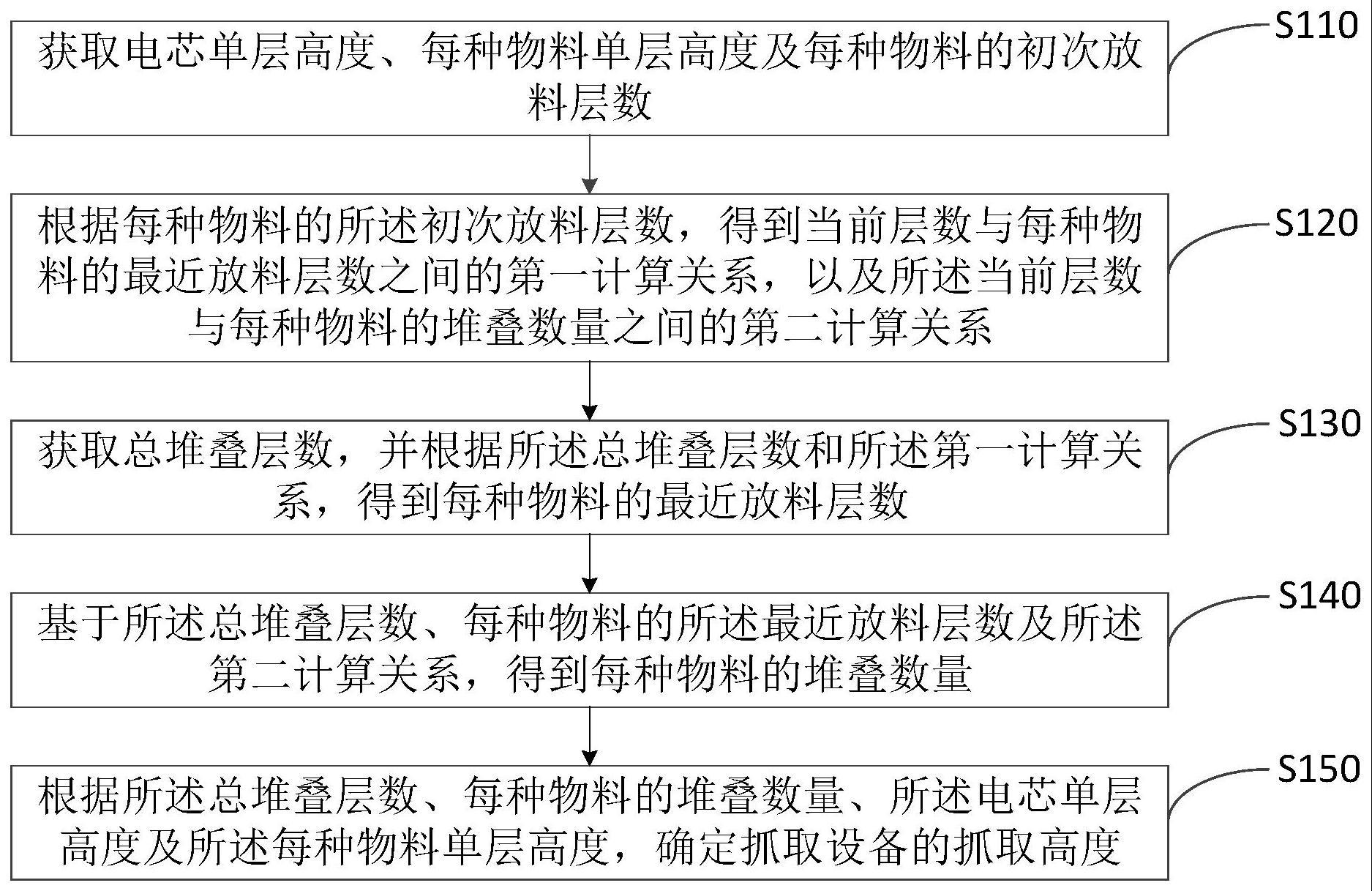
3、获取电芯单层高度、每种物料单层高度及每种物料的初次放料层数;
4、根据每种物料的所述初次放料层数,得到当前层数与每种物料的最近放料层数之间的第一计算关系,以及所述当前层数与每种物料的堆叠数量之间的第二计算关系;
5、获取总堆叠层数,并根据所述总堆叠层数和所述第一计算关系,得到每种物料的最近放料层数;
6、基于所述总堆叠层数、每种物料的所述最近放料层数及所述第二计算关系,得到每种物料的堆叠数量;
7、根据所述总堆叠层数、每种物料的堆叠数量、所述电芯单层高度及所述每种物料单层高度,确定抓取设备的抓取高度。
8、可选的,在本发明实施例提供的一种可行方式中,所述第一计算关系为:针对每种所述物料,若所述当前层数与所述物料的最近放料层数的差,等于所述物料的初次放料层数的整数倍,则将所述当前层数赋值为所述物料的之前物料的最近放料层数,所述物料的之前物料的初次放料层数小于所述物料的初次放料层数。
9、可选的,在本发明实施例提供的一种可行方式中,所述第二计算关系为:针对每种所述物料,若所述当前层数与所述物料的最近放料层数的差,等于所述物料的初次放料层数的正整数倍,则将所述物料的堆叠数量计数加一。
10、可选的,在本发明实施例提供的一种可行方式中,所述基于所述总堆叠层数、每种物料的所述最近放料层数及所述第二计算关系,得到每种物料的堆叠数量,包括:
11、将由第一堆叠层至所述总堆叠层数对应的每个层数代入所述第二计算关系,并将每个层数对应的每种物料的最近放料层数代入所述第二计算关系,得到所述总堆叠层数对应的每种物料的堆叠数量。
12、可选的,在本发明实施例提供的一种可行方式中,所述获取总堆叠层数,并根据所述总堆叠层数和所述第一计算关系,得到每种物料的最近放料层数,包括:
13、获取总堆叠层数,并将由第一堆叠层至所述总堆叠层数对应的每个层数代入所述第一计算关系,得到每层对应的每种物料的最近放料层数。
14、可选的,在本发明实施例提供的一种可行方式中,所述方法还包括:
15、若每种物料的初次放料层数均大于所述当前层数,则将每种物料的最近放料层数赋值为0。
16、可选的,在本发明实施例提供的一种可行方式中,所述根据所述总堆叠层数、每种物料的堆叠数量、所述电芯单层高度及所述每种物料单层高度,确定抓取设备的抓取高度,包括:
17、获取抓取设备的基准高度,并根据所述总堆叠层数、每种物料的堆叠数量、所述电芯单层高度、所述每种物料单层高度及所述基准高度,确定所述抓取设备的所述抓取高度。
18、第二方面,本发明实施例提供一种抓取设备的高度确定装置,包括:
19、高度获取模块,用于获取电芯单层高度、每种物料单层高度及每种物料的初次放料层数;
20、关系得到模块,用于根据每种物料的所述初次放料层数,得到当前层数与每种物料的最近放料层数之间的第一计算关系,以及所述当前层数与每种物料的堆叠数量之间的第二计算关系;
21、层数得到模块,用于获取总堆叠层数,并根据所述总堆叠层数和所述第一计算关系,得到每种物料的最近放料层数;
22、数量得到模块,用于基于所述总堆叠层数、每种物料的所述最近放料层数及所述第二计算关系,得到每种物料的堆叠数量;
23、高度确定模块,用于根据所述总堆叠层数、每种物料的堆叠数量、所述电芯单层高度及所述每种物料单层高度,确定抓取设备的抓取高度。
24、第三方面,本发明实施例提供一种计算机设备,包括存储器以及处理器,存储器存储有计算机程序,计算机程序在处理器上运行时执行如第一方面中任一种公开的抓取设备的高度确定方法。
25、第四方面,本发明实施例提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序在处理器上运行时执行如第一方面中任一种公开的抓取设备的高度确定方法。
26、本发明实施例提供的抓取设备的高度确定方法中,首先将获取电芯单层高度、每种物料单层高度及每种物料的初次放料层数;接着,根据每种物料的初次放料层数,确定层数与物料的最近放料层数的联系,也即,得到当前层数与每种物料的最近放料层数之间的第一计算关系,同时,确定层数与物料的堆叠数量的联系,即得到当前层数与每种物料的堆叠数量之间的第二计算关系;然后,获取总堆叠层数,并根据总堆叠层数和第一计算关系,得到每种物料的最近放料层数;之后,基于总堆叠层数、每种物料的最近放料层数及第二计算关系,得到每种物料的堆叠数量;最后,根据总堆叠层数、每种物料的堆叠数量、电芯单层高度及每种物料单层高度,确定抓取设备的抓取高度。基于此,本发明实施例基于物料堆叠时与堆叠层数的关系,使得抓取设备在进行抓取动作时,能自动确认相应的抓取高度,由此无需人工校准抓取设备或设置示教点位,进而减少了抓取设备的调试次数,提高了抓取设备的工作效率。
技术特征:
1.一种抓取设备的高度确定方法,其特征在于,包括:
2.根据权利要求1所述的抓取设备的高度确定方法,其特征在于,所述第一计算关系为:针对每种所述物料,若所述当前层数与所述物料的最近放料层数的差,等于所述物料的初次放料层数的整数倍,则将所述当前层数赋值为所述物料的之前物料的最近放料层数,所述物料的之前物料的初次放料层数小于所述物料的初次放料层数。
3.根据权利要求2所述的抓取设备的高度确定方法,其特征在于,所述第二计算关系为:针对每种所述物料,若所述当前层数与所述物料的最近放料层数的差,等于所述物料的初次放料层数的正整数倍,则将所述物料的堆叠数量计数加一。
4.根据权利要求1所述的抓取设备的高度确定方法,其特征在于,所述基于所述总堆叠层数、每种物料的所述最近放料层数及所述第二计算关系,得到每种物料的堆叠数量,包括:
5.根据权利要求1所述的抓取设备的高度确定方法,其特征在于,所述获取总堆叠层数,并根据所述总堆叠层数和所述第一计算关系,得到每种物料的最近放料层数,包括:
6.根据权利要求1所述的抓取设备的高度确定方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的抓取设备的高度确定方法,其特征在于,所述根据所述总堆叠层数、每种物料的堆叠数量、所述电芯单层高度及所述每种物料单层高度,确定抓取设备的抓取高度,包括:
8.一种抓取设备的高度确定装置,其特征在于,包括:
9.一种计算机设备,其特征在于,所述计算机设备包括存储器及处理器,所述存储器存储有计算机程序,所述计算机程序在所述处理器执行时,实现如权利要求1至7中任一项所述的抓取设备的高度确定方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时,实现如权利要求1至7中任一项所述的抓取设备的高度确定方法。
技术总结
本发明公开了一种抓取设备的高度确定方法、装置、计算机设备及存储介质,涉及定位领域,方法包括:获取电芯单层高度、每种物料单层高度及初次放料层数;根据每种物料的初次放料层数,得到当前层数与最近放料层数的第一计算关系,并得到当前层数与堆叠数量的第二计算关系;获取总堆叠层数,并根据总堆叠层数和第一计算关系,得到物料的最近放料层数;基于总堆叠层数、物料的最近放料层数及第二计算关系,得到物料的堆叠数量;根据总堆叠层数、物料的堆叠数量和物料单层高度,以及电芯单层高度,确定抓取设备的抓取高度。基于此,本发明使得抓取设备在进行抓取动作时无需人工设置示教点位。
技术研发人员:冉昌林,熊锋,蔡斌,刘俊
受保护的技术使用者:江苏逸飞激光设备有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!