核酸采样机器人的制作方法
本发明涉及机器人,尤其是涉及一种核酸采样机器人。
背景技术:
1、拭子检测是一种医学检测方法,例如采用医用棉签从人体的咽部或鼻腔等部分收集少量分泌物进行检测,以用于了解受检部位的健康状况。拭子包括杆部和采样头,采样头设于杆部的前端,通常是一团有吸收能力的材料(如棉花)。
2、核酸检测法(英文名:nucleic acid detection method)是通过查找患者的呼吸道标本、血液或粪便中是否存在外来入侵的病毒的dna和rna,来判断是否被病毒感染的方法。例如,新冠病毒感染人体之后,首先会在呼吸道系统中进行繁殖,因此可以通过检测痰液、鼻咽拭子中的病毒核酸判断人体是否感染病毒。
3、核酸采样机器人从功能上主要分为两类:咽拭子采样机器人和鼻拭子采样机器人。其中咽拭子采样机器人为采用机械手携带咽拭子对被采样者口咽部进行刮擦取样,鼻拭子机器人为采用机械手携带鼻拭子深入被采样者鼻腔进行取样。
4、相关技术中,核酸采样机器人需要存储洁净的拭子和试管、夹持洁净拭子进行采样、以及存储装有样本的试管。由于洁净拭子、洁净试管和装有样本的试管同时容纳在机器人的内部,没有分区存放,容易出现相互接触,造成洁净拭子、洁净试管或样本受到污染,导致最终的检测结果不准确。因此,相关技术中的采样机器人存在着内部交叉污染风险高的技术问题。
技术实现思路
1、本发明的目的在于提供一种核酸采样机器人,旨在解决相关技术中的核酸采样机器人存在着内部交叉污染风险高的技术问题。
2、本申请提供了一种核酸采样机器人,包括:
3、壳体,所述壳体具有第一腔体、第二腔体和第三腔体,所述第二腔体具有与所述第一腔体连通的第一传送口、与所述第三腔体连通的第二传送口、以及与所述壳体外部连通的采样口;
4、拭子供应机构,所述拭子供应机构安装于所述第一腔体,所述拭子供应机构用于存储拭子,以及用于向所述第一传送口供应所述拭子;
5、拭子操作机构,所述拭子操作机构安装于所述第二腔体,所述拭子操作机构用于从所述第一传送口夹取所述拭子,用于夹持所述拭子经所述采样口进行采样,以及用于向所述第二传送口输送采样后的所述拭子;
6、管供应机构,所述管供应机构放置于所述第三腔体,所述管供应机构用于存储若干个试管并供应所述试管;
7、样本存放机构,所述样本存放机构放置于所述第三腔体,所述样本存放机构用于存放样本管;
8、试管操作机构,所述试管操作机构安装于所述第三腔体,所述试管操作机构用于从所述管供应机构接收所述试管,用于夹持所述试管至所述第二传送口接收采样后的所述拭子形成样本管,以及用于向所述样本存放机构输送所述样本管。
9、本发明提供的核酸采样机器人的有益效果是:位于第一腔体的拭子供应机构通过第一传送口向位于第二腔体的拭子操作机构供应洁净的拭子,拭子操作机构夹取拭子经采样口进行采样,采样完成后通过第二传送口传递带有样本的拭子,位于第三腔体的试管操作机构从管供应机构获取试管,夹持该试管至第二传送口接收采样后的拭子,则该试管变为样本管,再将样本管输送至样本存放机构保存,其中,第一腔体、第二腔体和第三腔体相互独立,即洁净的拭子、拭子的采样和试管存储处理分别位于不同的腔体,洁净的试管和样本管分别存放在管供应机构和样本存放机构,实现净污分离,解决了相关技术中的核酸采样机器人存在着内部交叉污染风险高的技术问题,从而降低了机器人内部的交叉污染风险,提高了样本检测的准确性。
技术特征:
1.一种核酸采样机器人,其特征在于,包括:
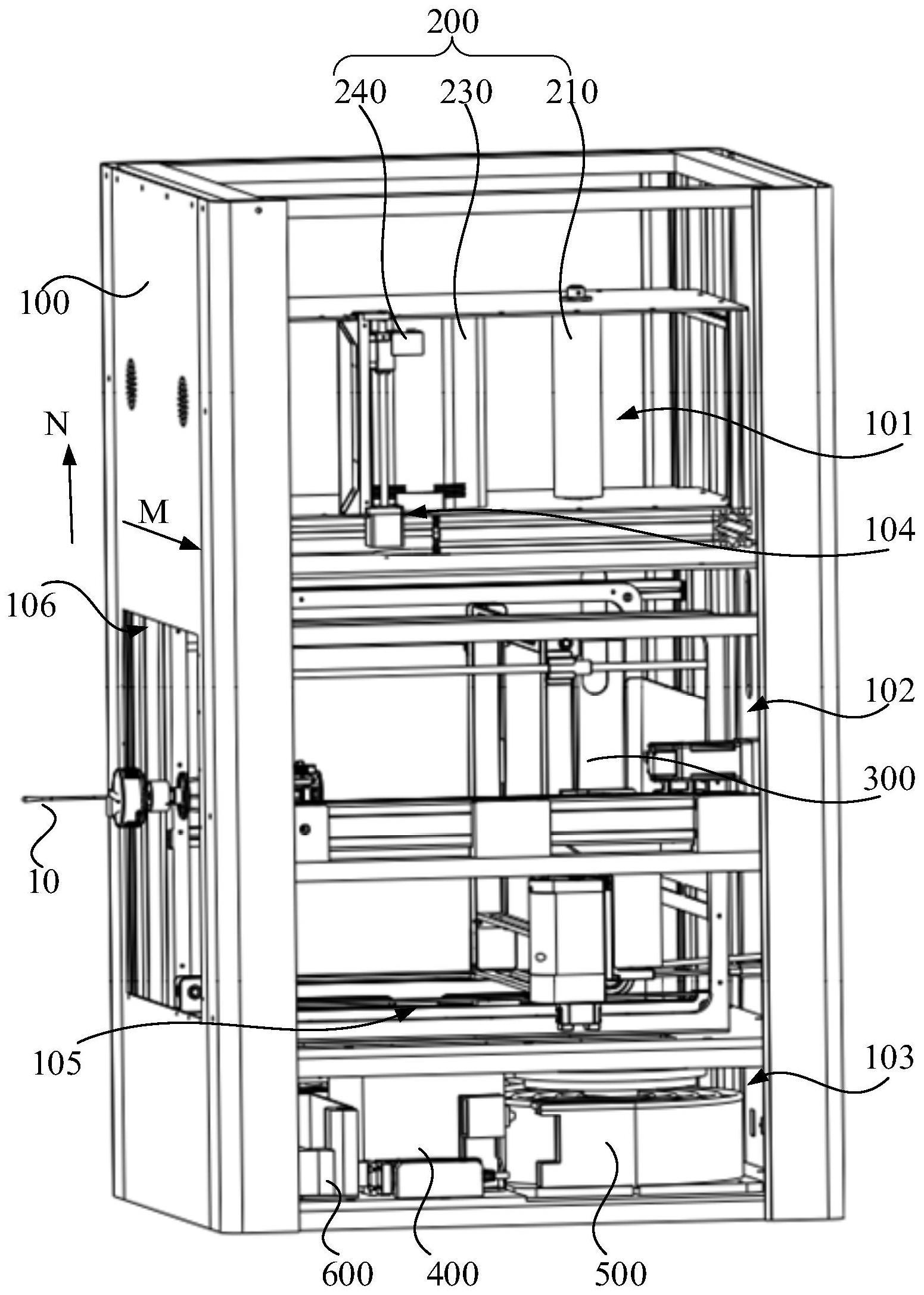
2.根据权利要求1所述的核酸采样机器人,其特征在于:所述拭子操作机构包括第一卷辊、第二卷辊、张紧件、供应驱动件和推出件,所述第一卷辊可转动地卷绕连续的装有拭子的包装袋,所述第二卷辊可转动地卷绕连续的已推出拭子的包装袋,所述张紧件用于张紧位于所述第一卷辊和所述第二卷辊之间的连续的包装袋,所述张紧件安装于所述第一传送口旁,所述供应驱动件用于驱动连续的包装袋沿所述第一卷辊、所述张紧件和所述第二卷辊输送,所述推出件能够沿所述拭子的长度方向移动,所述推出件的移动方向正对所述第一传送口,所述推出件推动张紧于所述张紧件的所述包装袋,以将所述拭子推出所述包装袋并进入所述第一传送口。
3.根据权利要求1所述的核酸采样机器人,其特征在于:所述采样口沿第一方向和第二方向延伸,以扩大所述采样口的面积;
4.根据权利要求3所述的核酸采样机器人,其特征在于:所述面罩机构还包括开合驱动组件,所述开合驱动组件包括开合驱动件和开合件,所述开合驱动件安装于所述隔离罩,所述开合驱动件的输出端与所述开合件连接,所述开合驱动件用于驱动所述开合件闭合或打开所述检测口。
5.根据权利要求1所述的核酸采样机器人,其特征在于:所述壳体具有前后方向、左右方向和高度方向;所述采样口位于所述壳体的前侧;所述拭子操作机构包括定向移动机构和机械手,所述定向移动机构包括安装于所述第二腔体的前后驱动组件、安装于所述前后驱动组件的输出端的上下驱动组件、安装于所述上下驱动组件的输出端的左右驱动组件,所述前后驱动组件用于驱动所述上下驱动组件沿所述前后方向平移,所述上下驱动组件用于驱动所述左右驱动组件沿所述高度方向平移,所述左右驱动组件的活动端与所述机械手连接,所述左右驱动组件用于驱动所述机械手沿所述左右方向平移;所述机械手用于夹持所述拭子。
6.根据权利要求5所述的核酸采样机器人,其特征在于:所述机械手包括第一夹具、动平台、传动杆、机械滑块、直线驱动器和基座,所述基座安装于所述左右驱动组件的活动端,所述直线驱动器安装于所述基座,所述直线驱动器的驱动方向为所述前后方向,所述机械滑块设置于所述直线驱动器的活动端,所述传动杆的一端转动安装于所述机械滑块,所述传动杆的另一端球铰接于所述动平台,所述第一夹具安装于所述动平台,所述第一夹具用于夹取所述拭子,所述传动杆、所述机械滑块和所述直线驱动器的数量为两个以上且一一对应,两个以上所述传动杆沿所述动平台的周侧间隔分布。
7.根据权利要求6所述的核酸采样机器人,其特征在于:所述机械手还包括刮擦驱动组件和进出驱动组件,所述进出驱动组件安装于所述左右驱动组件的活动端,所述进出驱动组件的输出端与所述刮擦驱动组件连接,所述进出驱动组件用于驱动所述刮擦驱动组件沿所述前后方向平移,所述刮擦驱动组件的输出端与所述基座连接,所述刮擦驱动组件用于驱动所述基座绕所述左右方向转动。
8.根据权利要求1所述的核酸采样机器人,其特征在于:所述管供应机构包括供管驱动件、存管带和推管片,所述供管驱动件安装于所述第三腔体,所述存管带环绕所述供管驱动件设置,所述存管带围出涡旋槽,所述涡旋槽的末端具有出管口,所述推管片位于所述存管带的上方,所述推管片的一端连接于所述供管驱动件的输出端,所述推管片的另一端能够转动经过所述出管口。
9.根据权利要求1所述的核酸采样机器人,其特征在于:所述试管操作机构包括第二夹具和第三驱动组件,所述第三驱动组件安装于所述第三腔体,所述第三驱动组件的输出端连接所述第二夹具,所述第三驱动组件用于驱动所述第二夹具分别移动至所述管供应机构的出管口、所述第二传送口和所述样本存放机构的的入料口。
10.根据权利要求1至9任意一项所述的核酸采样机器人,其特征在于:
技术总结
本发明涉及机器人技术领域,提供一种核酸采样机器人,包括壳体、拭子供应机构、拭子操作机构、管供应机构、样本存放机构和试管操作机构,壳体具有第一腔体、第二腔体和第三腔体,第二腔体具有与第一腔体连通的第一传送口、与第三腔体连通的第二传送口、以及与壳体外部连通的采样口。其中,洁净的拭子、拭子的采样和试管存储处理分别位于不同的腔体,洁净的试管和样本管分别存放在管供应机构和样本存放机构,实现净污分离,解决了相关技术中的核酸采样机器人存在着内部交叉污染风险高的技术问题,降低了机器人内部的交叉污染风险,提高了样本检测的准确性。
技术研发人员:孟李艾俐,肖霄,赵梓淇,吕良,孟悦,陈彦奇
受保护的技术使用者:骨圣元化机器人(深圳)有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!