一种自行走式煤仓巡检机器人的制作方法
本发明涉及煤仓巡检设备,具体涉及一种自行走式煤仓巡检机器人。
背景技术:
1、煤仓巡检机器人作为一种代替人工进入煤仓对其内部环境的温度、湿度、煤仓的仓壁质量及有害、高危气体浓度含量进行检测,其避免了人工直接进入煤仓内检测时存在的安全隐患,同时又利用各种传感器具备对煤仓内部环境的更加全面、精确、方便的检测。
2、煤仓巡检机器人在常规的设置方式中,有布置轨道用于巡检机器人在煤仓内各处行走实现检测的方式,也有利用悬挂的方式利用牵引力上拉或者下放机器人实现机器人在煤仓高度方向行走并配合巡检机器人自身的检测部分可在水平方向360°调节的性能的方式。
3、而第一种巡检机器人的设置方式存在成本高、对煤仓额外附加的承重大、施工难度高的弊端,且第二种巡检机器人的设置方式中存在机器人被悬挂时稳定性较差、行走过程易摇晃影响检测精度的弊端。鉴于此,本申请提供了一种自行走时煤仓巡检机器人。
技术实现思路
1、为解决上述技术问题,本发明提出一种自行走式煤仓巡检机器人。
2、本发明的技术方案是这样实现的:
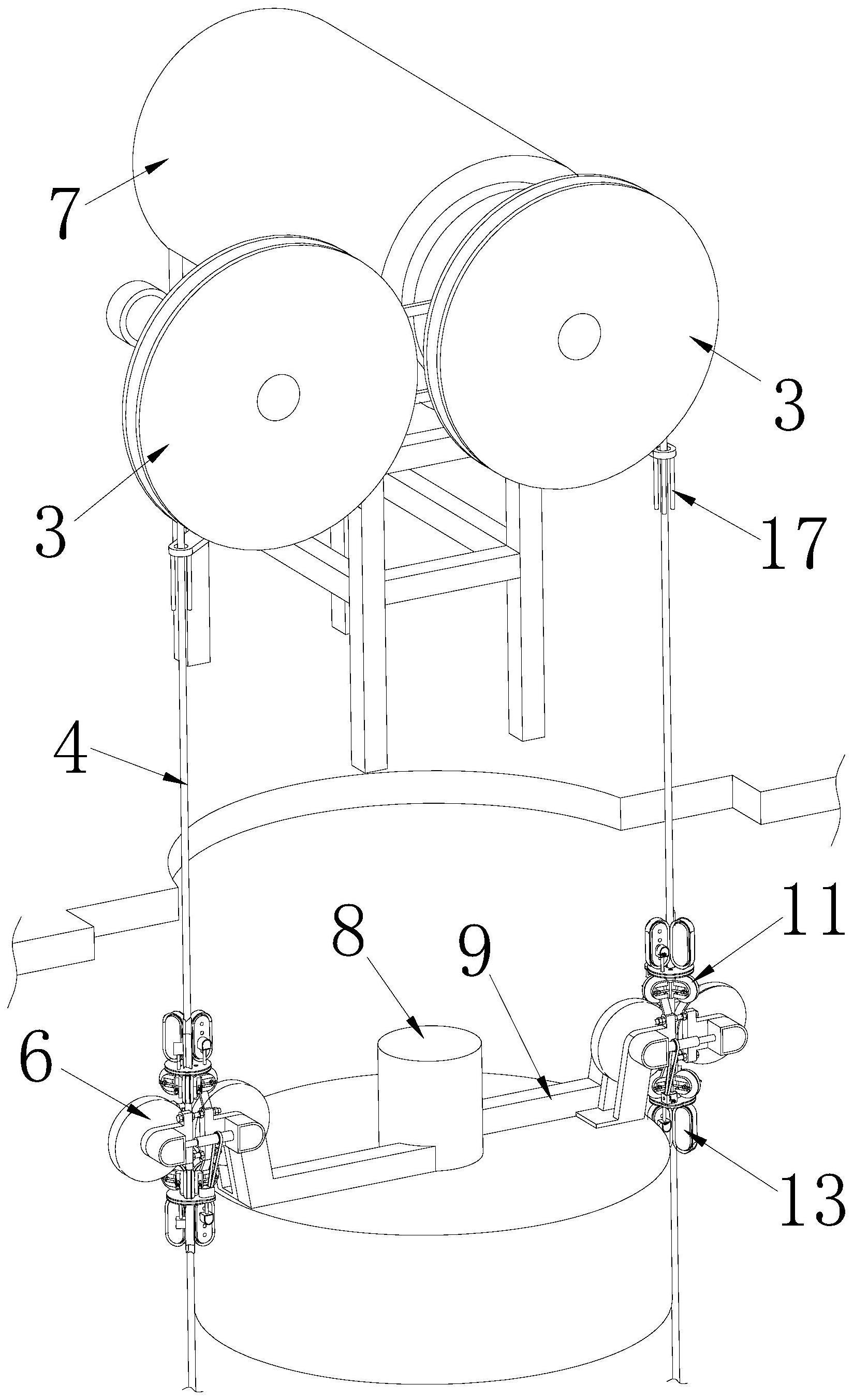
3、一种自行走式煤仓巡检机器人,包括防护箱、换向轮组、缠绕轮、钢丝绳和机器人本体,其中,所述防护箱设置在煤仓的底部,所述换向轮组设置在防护箱内,所述缠绕轮在煤仓的顶部设置有两个,所述钢丝绳的一端绕设在其中一个缠绕轮上,钢丝绳的另一端垂直向下延伸至煤仓底部并经过换向轮组后垂直向上延伸至煤仓顶部绕设在另一个缠绕轮上,两个缠绕轮设置成同步动作,且当其中一个缠绕轮释放钢丝绳时另一个缠绕轮缠绕钢丝绳,所述机器人本体设置在钢丝绳的两个竖直段之间,且机器人本体的两侧设置有分别在钢丝绳的两个竖直段上行走的行走轮组。
4、进一步地,所述防护箱设置成梯形结构,其顶部的两端均设置有用于钢丝绳进出防护箱的通孔,且通孔的顶部设置有适配于钢丝绳直径的导绳套。
5、进一步地,所述钢丝绳的竖直段底端延伸至防护箱内,所述换向轮组包括换向轮、限位轮和防跳轮,所述换向轮设置在防护箱内的两侧,钢丝绳的两个竖直段经过换向轮的底部之后形成水平段,限位轮呈轴向垂直设置且限位轮等距设置在钢丝绳水平段的两侧,防跳轮设置在箱体内并相对于钢丝绳的竖直段设置在换向轮的对侧,且防跳轮的高度大于换向轮的高度。
6、进一步地,其中一个所述缠绕轮连接在缠绕电机的输出轴上,另一个缠绕轮与缠绕电机传动配合,所述缠绕电机安装在煤仓的顶部。
7、进一步地,所述行走轮组包括夹持在钢丝绳两侧的内侧行走轮和外侧行走轮,内侧行走轮通过内侧轮架安装在机器人本体的顶部,外侧行走轮安装在内侧轮架上,所述机器人本体上设置有行走电机,行走电机通过行走驱动结构驱动内侧行走轮转动,外侧行走轮通过行走传动结构连接行走驱动结构使得外侧行走轮与内侧行走轮同步反向转动。
8、进一步地,所述外侧行走轮设置成与内侧行走轮之间的间距可调,以调节外侧行走轮与内侧行走轮对钢丝绳的夹持作用力。
9、进一步地,所述行走轮组的上下两侧均设置有呈中心对称夹持在钢丝绳竖直段上的辅助轮,所述辅助轮通过支架安装在内侧轮架上,且辅助轮在支架上设置成在平行于钢丝绳竖直段的径向上位置可调,以调节辅助轮对钢丝绳的夹持作用力。
10、进一步地,位于上方所述支架的顶部及位于下方所述支架的底部均设置有呈中心对称的分布在钢丝绳竖直段外部的清扫刷,所述清扫刷通过清扫驱动结构传动连接行走驱动结构,且清扫驱动结构设置成在机器人本体上下行走时,驱动位于上方的清扫刷始终向上扫煤,驱动位于下方的清扫刷始终向下扫煤。
11、进一步地,所述钢丝绳上等距套设有球形卡块,所述内侧行走轮、外侧行走轮及辅助轮均设置有与球形卡块相适配的可咬合球形卡块的卡槽。
12、进一步地,所述煤仓顶部固定设置有位于缠绕轮的下方并呈中心对称分布在钢丝绳外侧的限位杆,且限位杆与清扫刷在钢丝绳竖直段的圆周方向呈交错设置,所述支架的顶部设置有用于限位杆插入的插孔。
13、本发明具有如下有益效果:
14、1、本发明的自行走式煤仓巡检机器人的机器人本体通过其两侧的行走轮组在钢丝绳的两个竖直段上行走,减少了气流对机器人本体的扰动,机器人本体的稳定性更强。
15、2、本发明的钢丝绳的两端通过经过仓底的换向轮组之后绕设在两个同步转动的缠绕轮上,使得钢丝绳可往复抽动,被煤仓内的原煤掩埋的钢丝绳部分通过往复抽动可卸去受到的原煤的压迫力,更加有利于保持钢丝绳的竖直部分的竖直状态,同时防止钢丝绳变形、受损。
16、3、本发明通过在行走轮组的上下两侧均设置清扫刷,且机器人本体在上升及下降的两个反向过程中,位于上方的清扫刷均呈向上清扫钢丝绳的状态,位于下方的清扫刷均呈向下清扫钢丝绳的状态,对钢丝绳的表面清洗效果好,使得机器人本体可长期有效的在钢丝绳上行走。
技术特征:
1.一种自行走式煤仓巡检机器人,其特征在于,包括防护箱(1)、换向轮组(2)、缠绕轮(3)、钢丝绳(4)和机器人本体(5),其中,所述防护箱(1)设置在煤仓的底部,所述换向轮组(2)设置在防护箱(1)内,所述缠绕轮(3)在煤仓的顶部设置有两个,所述钢丝绳(4)的一端绕设在其中一个缠绕轮(3)上,钢丝绳(4)的另一端垂直向下延伸至煤仓底部并经过换向轮组(2)后垂直向上延伸至煤仓顶部绕设在另一个缠绕轮(3)上,两个缠绕轮(3)设置成同步动作,且当其中一个缠绕轮(3)释放钢丝绳(4)时另一个缠绕轮(3)缠绕钢丝绳(4),所述机器人本体(5)设置在钢丝绳(4)的两个竖直段(4-1)之间,且机器人本体(5)的两侧设置有分别在钢丝绳(4)的两个竖直段(4-1)上行走的行走轮组(6)。
2.根据权利要求1所述的一种自行走式煤仓巡检机器人,其特征在于,所述防护箱(1)设置成梯形结构,其顶部的两端均设置有用于钢丝绳(4)进出防护箱(1)的通孔,且通孔的顶部设置有适配于钢丝绳(4)直径的导绳套(1-1)。
3.根据权利要求1所述的一种自行走式煤仓巡检机器人,其特征在于,所述钢丝绳(4)的竖直段(4-1)底端延伸至防护箱(1)内,所述换向轮组(2)包括换向轮(2-1)、限位轮(2-2)和防跳轮(2-3),所述换向轮(2-1)设置在防护箱(1)内的两侧,钢丝绳(4)的两个竖直段(4-1)经过换向轮(2-1)的底部之后形成水平段(4-2),限位轮(2-2)呈轴向垂直设置且限位轮(2-2)等距设置在钢丝绳(4)水平段(4-2)的两侧,防跳轮(2-3)设置在箱体内并相对于钢丝绳(4)的竖直段(4-1)设置在换向轮(2-1)的对侧,且防跳轮(2-3)的高度大于换向轮(2-1)的高度。
4.根据权利要求1所述的一种自行走式煤仓巡检机器人,其特征在于,其中一个所述缠绕轮(3)连接在缠绕电机(7)的输出轴上,另一个缠绕轮(3)与缠绕电机(7)传动配合,所述缠绕电机(7)安装在煤仓的顶部。
5.根据权利要求1所述的一种自行走式煤仓巡检机器人,其特征在于,所述行走轮组(6)包括夹持在钢丝绳(4)两侧的内侧行走轮(6-1)和外侧行走轮(6-2),内侧行走轮(6-1)通过内侧轮架(6-3)安装在机器人本体(5)的顶部,外侧行走轮(6-2)安装在内侧轮架(6-3)上,所述机器人本体(5)上设置有行走电机(8),行走电机(8)通过行走驱动结构(9)驱动内侧行走轮(6-1)转动,外侧行走轮(6-2)通过行走传动结构(10)连接行走驱动结构(9)使得外侧行走轮(6-2)与内侧行走轮(6-1)同步反向转动。
6.根据权利要求5所述的一种自行走式煤仓巡检机器人,其特征在于,所述外侧行走轮(6-2)设置成与内侧行走轮(6-1)之间的间距可调,以调节外侧行走轮(6-2)与内侧行走轮(6-1)对钢丝绳(4)的夹持作用力。
7.根据权利要求5所述的一种自行走式煤仓巡检机器人,其特征在于,所述行走轮组(6)的上下两侧均设置有呈中心对称夹持在钢丝绳(4)竖直段(4-1)上的辅助轮(11),所述辅助轮(11)通过支架(12)安装在内侧轮架(6-3)上,且辅助轮(11)在支架(12)上设置成在平行于钢丝绳(4)竖直段(4-1)的径向上位置可调,以调节辅助轮(11)对钢丝绳(4)的夹持作用力。
8.根据权利要求7所述的一种自行走式煤仓巡检机器人,其特征在于,位于上方所述支架(12)的顶部及位于下方所述支架(12)的底部均设置有呈中心对称的分布在钢丝绳(4)竖直段(4-1)外部的清扫刷(13),所述清扫刷(13)通过清扫驱动结构(14)传动连接行走驱动结构(9),且清扫驱动结构(14)设置成在机器人本体(5)上下行走时,驱动位于上方的清扫刷(13)始终向上扫煤,驱动位于下方的清扫刷(13)始终向下扫煤。
9.根据权利要求7所述的一种自行走式煤仓巡检机器人,其特征在于,所述钢丝绳(4)上等距套设有球形卡块(15),所述内侧行走轮(6-1)、外侧行走轮(6-2)及辅助轮(11)均设置有与球形卡块(15)相适配的可咬合球形卡块(15)的卡槽(16)。
10.根据权利要求7所述的一种自行走式煤仓巡检机器人,其特征在于,所述煤仓顶部固定设置有位于缠绕轮(3)的下方并呈中心对称分布在钢丝绳(4)外侧的限位杆(17),且限位杆(17)与清扫刷(13)在钢丝绳(4)竖直段(4-1)的圆周方向呈交错设置,所述支架(12)的顶部设置有用于限位杆(17)插入的插孔(18)。
技术总结
本发明提出了自行走式煤仓巡检机器人,属于煤仓巡检设备技术领域。所述自行走式煤仓巡检机器人,包括防护箱、换向轮组、缠绕轮、钢丝绳和机器人本体,其中,防护箱设置在煤仓的底部,换向轮组设置在防护箱内,缠绕轮在煤仓的顶部设置有两个,钢丝绳的一端绕设在其中一个缠绕轮上,钢丝绳的另一端垂直向下延伸至煤仓底部并经过换向轮组后垂直向上延伸至煤仓顶部绕设在另一个缠绕轮上,两个缠绕轮设置成同步动作,且当其中一个缠绕轮释放钢丝绳时另一个缠绕轮缠绕钢丝绳,机器人本体设置在钢丝绳的两个竖直段之间,且机器人本体的两侧设置有分别在钢丝绳的两个竖直段上行走的行走轮组。本发明具有机器人抗气流性能好及稳定性强的优点。
技术研发人员:赵明辉,缪杰,张少宾,倪天皓
受保护的技术使用者:中煤科工集团上海有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!