一种车辆喷涂方法、装置、终端设备及存储介质与流程
本发明涉及汽车研发及生产领域,尤其涉及一种车辆喷涂方法、装置、终端设备及存储介质。
背景技术:
1、近年来,人们对汽车的消费需求有了显著的提升,汽车的外形往往成为关注的重点,因此,各个汽车厂商纷纷推出新的车型来满足市场需求,为了加快车辆的上市速度,研发和生产过程中的每个环节均在考虑如何提效,以便在最短的时间内生产出新车。而现有技术中,在汽车生产的涂装板块中,pvc喷涂机器人在样车过线时,根据其摄像系统对样车扫描测量后,获得车身数据,然后根据车身数据计算得到摄像头的特征点数据,进而根据特征点数据与pvc喷涂机器人各工件坐标计算得到各工件的喷涂轨迹,其中,pvc喷涂机器人多项数据因为机器权限问题,需要和pvc喷涂机器人厂家进行反复沟通,且整个计算过程需要企业内部其他部门的紧密配合,经常需要半个月以上的时间,使得车辆研发及生产周期过长。
技术实现思路
1、为了克服上述现有技术的不足,本发明提出了一种车辆喷涂方法、装置、终端设备及存储介质,能够在样车出现前获得pvc喷涂机器人各工件的喷涂轨迹,有效缩减了车辆的研发及生产周期,加快了汽车量产及上市速度。
2、本发明实施例提供了一种车辆喷涂方法,包括:
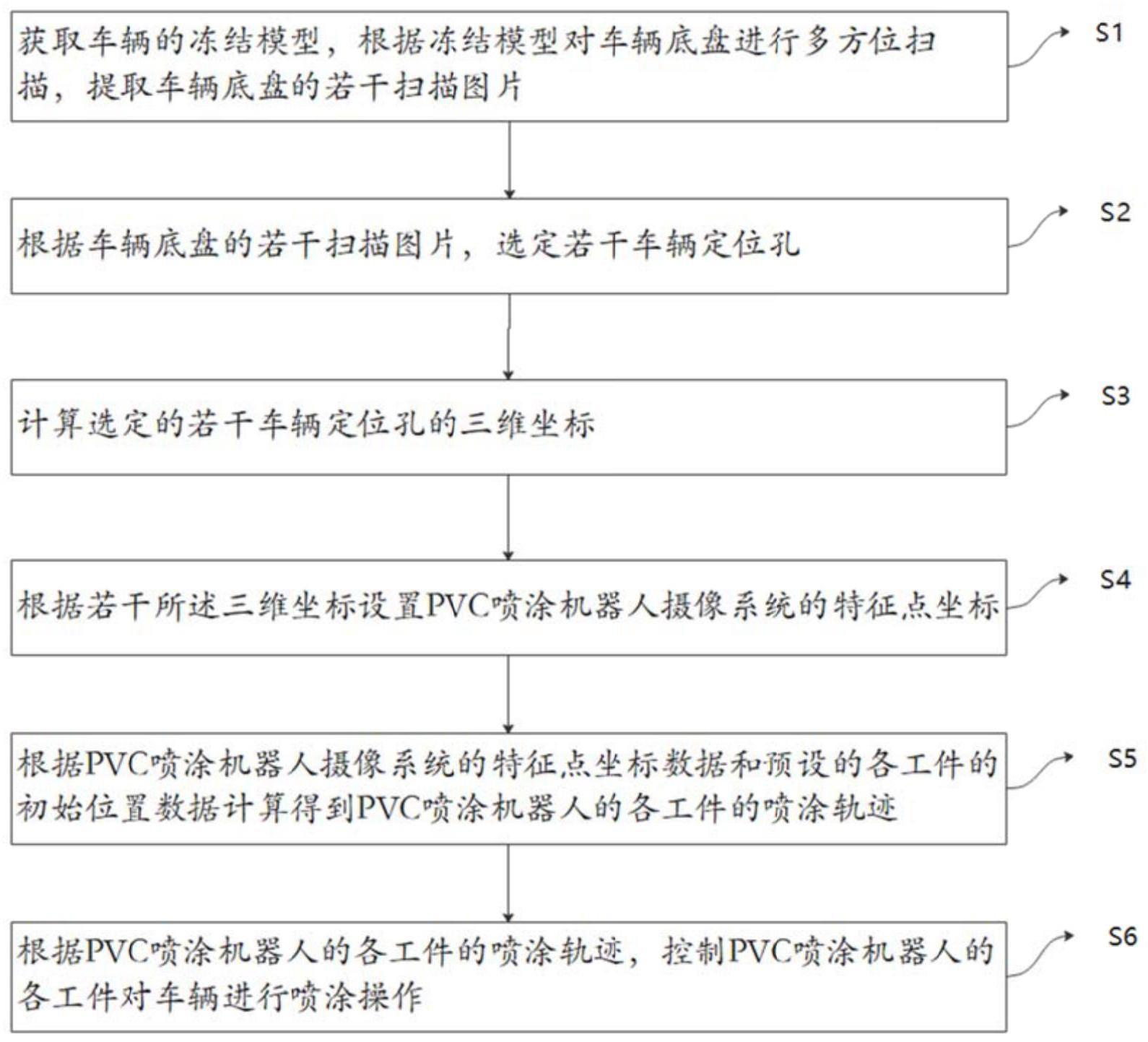
3、获取车辆的冻结模型,根据冻结模型对车辆底盘进行多方位扫描,提取车辆底盘的若干扫描图片;
4、根据车辆底盘的若干扫描图片,选定若干车辆定位孔;
5、计算选定的若干车辆定位孔的三维坐标;
6、根据若干所述三维坐标设置pvc喷涂机器人摄像系统的特征点坐标;
7、根据pvc喷涂机器人摄像系统的特征点坐标数据和预设的各工件的初始位置数据计算得到pvc喷涂机器人的各工件的喷涂轨迹;
8、根据pvc喷涂机器人的各工件的喷涂轨迹,控制pvc喷涂机器人的各工件对车辆进行喷涂操作。
9、进一步地,根据车辆底盘的若干扫描图片,选定若干车辆定位孔,包括:
10、利用图像处理算法对扫描图片进行处理,识别各扫描图片中的圆孔;
11、计算各扫描图片中圆孔的灰度值,将灰度值低于预设阈值的圆孔,作为车辆定位孔。
12、进一步地,根据若干所述三维坐标设置pvc喷涂机器人摄像系统的特征点坐标,包括:
13、获取pvc喷涂机器人摄像系统中各摄像头的方向向量;
14、根据车辆定位孔的三维坐标、pvc喷涂机器人摄像系统的位置坐标以及所述方向向量计算得到特征点坐标;
15、进一步地,根据pvc喷涂机器人摄像系统设置的特征点坐标数据和预设的各工件的位置数据进行计算,得到pvc喷涂机器人的各工件喷涂轨迹,包括
16、获取pvc喷涂机器人各工件的位置坐标;
17、根据各个工件位置坐标与pvc喷涂机器人摄像系统的特征点坐标,计算得到各个工件与车辆底盘定位孔的位置矢量关系;
18、根据预设的车身待喷涂板块位置矢量数据对所述位置矢量关系进行矢量补偿,计算得到pvc喷涂机器人的各工件喷涂轨迹。
19、进一步地,根据pvc喷涂机器人的各工件喷涂轨迹,控制pvc喷涂机器人的各工件对车辆进行喷涂操作,包括:
20、当车辆过线时,控制pvc喷涂机器人的摄像系统根据特征点坐标对车辆底盘的定位孔进行扫描匹配,当与车辆底盘的定位孔匹配偏差率低于所设的偏差率阈值时,则根据对应的pvc喷涂机器人各工件喷涂轨迹对车辆进行喷涂。
21、进一步地,在根据pvc喷涂机器人的各工件喷涂轨迹,控制pvc喷涂机器人的各工件对车辆进行喷涂操作前,还包括:
22、对pvc喷涂机器人的各工件进行喷涂指标设置,所述喷涂指标包括流量和工件压力度。
23、本发明实施例还提供了一种车辆喷涂装置,包括:
24、图片提取模块,用于根据冻结模型对车辆底盘进行多方位扫描,提取车辆底盘的若干扫描图片;
25、定位孔选取模块,用于根据车辆底盘的若干扫描图片,选定若干车辆定位孔;
26、定位孔计算模块,用于计算选定的若干车辆定位孔的三维坐标;
27、特征点设置模块,用于根据若干所述三维坐标设置pvc喷涂机器人摄像系统的特征点坐标;
28、喷涂轨迹计算模块,用于根据pvc喷涂机器人摄像系统的特征点坐标数据和预设的各工件的初始位置数据计算得到pvc喷涂机器人的各工件的喷涂轨迹;
29、喷涂操作模块,用于根据pvc喷涂机器人的各工件的喷涂轨迹,控制pvc喷涂机器人的各工件对车辆进行喷涂操作。
30、本发明实施例还提供了一种终端设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器在执行所述计算机程序时实现如权利要求1-6中任一项所述的车辆喷涂方法。
31、本发明实施例还提供了一种存储介质,所述存储介质包括存储的计算机程序;其中,所述计算机程序在运行时控制所述计算机可读存储介质所在的设备执行本发明任一项所述的车辆喷涂方法。
32、通过实施本发明的实施例具有如下有益效果:
33、本发明中,在汽车底盘选取多个定位孔,根据定位孔坐标计算得到pvc喷涂机器人摄像系统的特征点坐标,进而获得pvc喷涂机器人各工件坐标的喷涂轨迹,即能够在样车出现前就得到pvc喷涂机器人的喷涂轨迹,一旦样车生产出来后,则可以直接根据定位孔进行样车识别,并控制pvc喷涂机器人对样车未生产前就获得的喷涂轨迹进行喷涂,进而有效缩减了生产周期,加快了汽车量产及上市速度。
技术特征:
1.一种车辆喷涂方法,其特征在于,包括:
2.根据权利要求1所述的一种车辆喷涂方法,其特征在于,根据车辆底盘的若干扫描图片,选定若干车辆定位孔,包括:
3.根据权利要求1所述的一种车辆喷涂方法,其特征在于,根据若干所述三维坐标设置pvc喷涂机器人摄像系统的特征点坐标,包括:
4.根据权利要求1所述的一种车辆喷涂方法,其特征在于,根据pvc喷涂机器人摄像系统设置的特征点坐标数据和预设的各工件的位置数据进行计算,得到pvc喷涂机器人的各工件喷涂轨迹,包括:
5.根据权利要求1所述的一种车辆喷涂方法,其特征在于,根据pvc喷涂机器人的各工件喷涂轨迹,控制pvc喷涂机器人的各工件对车辆进行喷涂操作,包括:
6.根据权利要求1所述的一种车辆喷涂方法,其特征在于,在根据pvc喷涂机器人的各工件喷涂轨迹,控制pvc喷涂机器人的各工件对车辆进行喷涂操作前,还包括:
7.一种车辆喷涂装置,其特征在于,包括:
8.一种终端设备,其特征在于,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器在执行所述计算机程序时实现如权利要求1-6中任一项所述的车辆喷涂方法。
9.一种存储介质,其特征在于,所述存储介质包括存储的计算机程序;其中,所述计算机程序在运行时控制所述存储介质所在的设备执行如权利要求1-6中任一项所述的车辆喷涂方法。
技术总结
本发明公开了一种车辆喷涂方法,包括:获取车辆的冻结模型,根据冻结模型对车辆底盘进行多方位扫描,提取车辆底盘的若干扫描图片;根据车辆底盘的若干扫描图片,选定若干车辆定位孔;计算选定的若干车辆定位孔的三维坐标;根据若干所述三维坐标设置PVC喷涂机器人摄像系统的特征点坐标;根据PVC喷涂机器人摄像系统的特征点坐标数据和预设的各工件的初始位置数据计算得到PVC喷涂机器人的各工件的喷涂轨迹;根据PVC喷涂机器人的各工件的喷涂轨迹,控制PVC喷涂机器人的各工件对车辆进行喷涂操作。本发明能够在样车出现前获得PVC喷涂机器人的喷涂轨迹,有效缩减了生产周期,加快了汽车量产及上市速度。
技术研发人员:蒋刚,刘艳萍,覃彩媚,雷敬钦,陈观福,奉昌博,武瑶瑶,黄萍,杨梅
受保护的技术使用者:东风柳州汽车有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!