混动型机器人的制作方法
本申请属于智能机器人设计及制造,尤其涉及一种混动型机器人。
背景技术:
1、未来人形机器人的智能化程度会不断提高,与人之间的沟通能力会持续增加。并且,除了机器人的智能化程度不断提高之外,机器人的语音能力、视觉能力、运动能力等性能也会不断地快速提升。随着机器人的各项性能指标的不断提升,机器人与用户之间的沟通交流的频率会不断升高,继而机器人根据用户下达的指令执行相应工作的频率也会不断增多,这就要求机器人必须具有充足的能源供应以保证机器人的续航能力。尤其的,机器人作为大功率设备,对能源的需求量更高。
2、然而,现有的机器人采用传统的锂电驱动,充电时间长,续航时间短,大大的影响了人形机器人实际应用效果。因此,现有的机器人的续航问题一直无法得到解决。
技术实现思路
1、本申请的目的在于提供一种混动型机器人,旨在解决现有的机器人采用传统的锂电驱动,已经无法满足机器人的续航要求的问题。
2、为实现上述目的,本申请采用的技术方案是:一种混动型机器人,包括:
3、锂电模组,锂电模组包括锂电池,锂电池用于为机器人负载提供所需电能;
4、氢能模组,氢能模组和锂电模组串联连接,氢能模组用于对锂电池进行充电;
5、其中,氢能模组包括:
6、主控器,锂电池和主控器电性连接,锂电池向主控器提供工作电能,且主控器检测锂电池的电量;
7、第一控制阀,主控器和第一控制阀电性连接,以控制第一控制阀开启或断开;
8、氢气瓶;
9、反应电堆,反应电堆和氢气瓶之间通过第一控制阀相连接,主控器和反应电堆电性连接以控制反应电堆启动或停机,反应电堆和锂电池电性连接以在反应电堆启动时对锂电池进行充电。
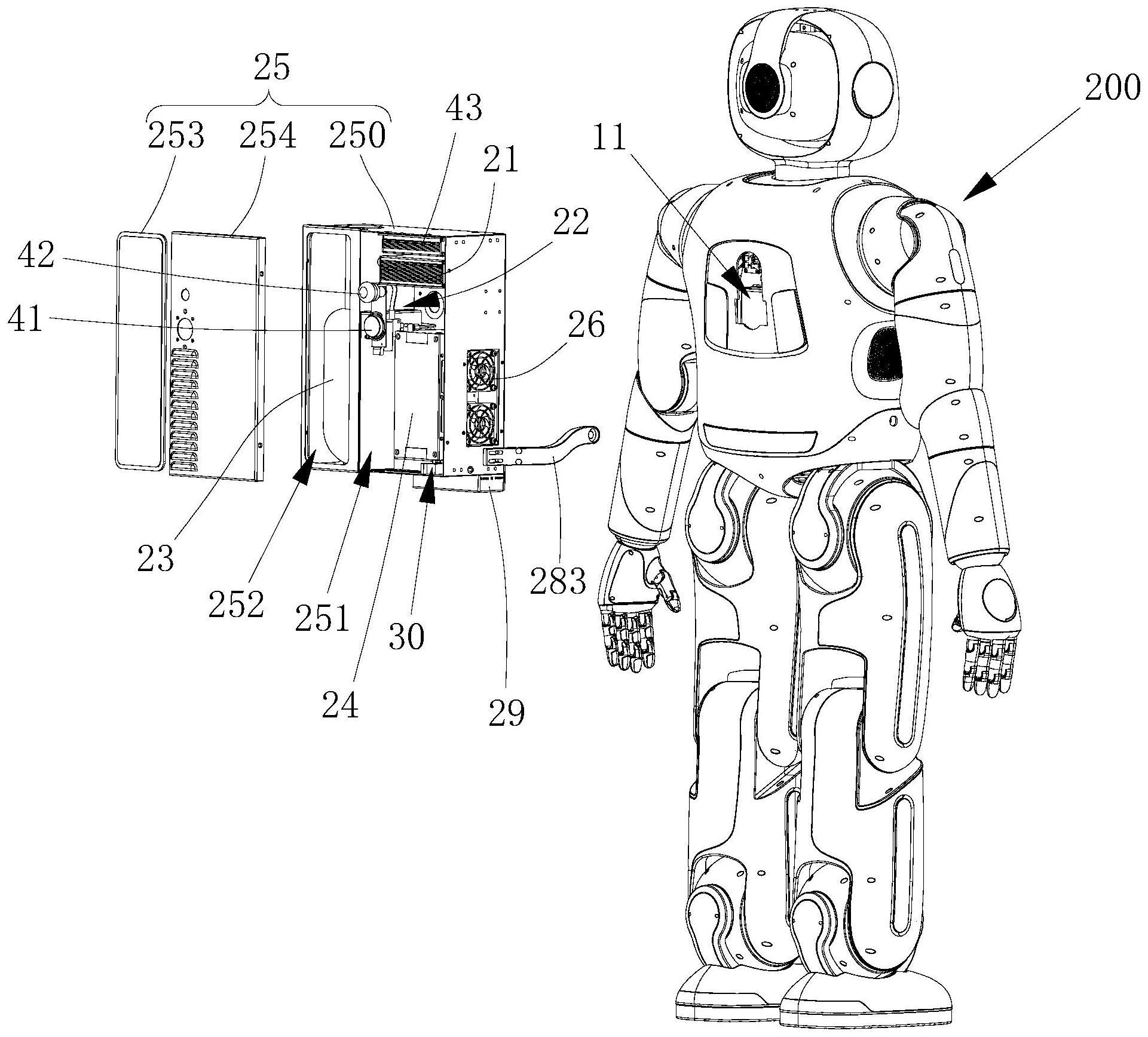
10、在一种实施例中,氢能模组还包括装配箱,装配箱设有第一装配腔和第二装配腔,主控器、第一控制阀及反应电堆均安装于第一装配腔内,氢气瓶可拆卸安装于第二装配腔内,以使氢能模组形成模块化设备,装配箱固定安装于机器人主体。
11、在一种实施例中,氢能模组还包括散热冷凝装置,散热冷凝装置安装于第一装配腔内,散热冷凝装置和主控器电性连接,散热冷凝装置用于对反应电堆进行散热并使反应电堆反应产生的水汽冷凝为液态水。
12、在一种实施例中,散热冷凝装置包括风扇,风扇的出风侧朝向反应电堆。
13、在一种实施例中,氢能模组还包括电源管理器,电源管理器安装于第一装配腔内,主控器和电源管理器电性连接以控制电源管理器执行工作,反应电堆和锂电池之间通过电源管理器电性连接。
14、在一种实施例中,混动型机器人为仿人形机器人;
15、装配箱固定连接有外挂支撑架,外挂支撑架固定连接在仿人形机器人上,以使装配箱外挂固定于仿人形机器人的背部。
16、在一种实施例中,外挂支撑架包括上端支撑柱、左侧支撑柱及右侧支撑柱,上端支撑柱的一端固定连接于装配箱朝向仿人形机器人的背部的侧壁的上端,上端支撑柱的另一端固定连接于仿人形机器人的背部,左侧支撑柱的一端固定连接于装配箱的左侧壁的下端,左侧支撑柱的另一端固定连接于仿人形机器人的左侧肋位置,右侧支撑柱的一端固定连接于装配箱的右侧壁的下端,右侧支撑柱的另一端固定连接于仿人形机器人的右侧肋位置。
17、在一种实施例中,氢能模组还包括蓄水箱,蓄水箱可拆卸连接于装配箱的底部,蓄水箱和反应电堆的排放口之间通过连接管相连通。
18、在一种实施例中,氢能模组还包括第二控制阀,第二控制阀设置于蓄水箱和反应电堆的排放口之间的连接管上,第二控制阀安装于第一装配腔内,第二控制阀和主控器电性连接。
19、在一种实施例中,第二控制阀为三通电磁阀,三通电磁阀的入口和反应电堆的排放口相连通,三通电磁阀的第一出口和蓄水箱相连通,三通电磁阀的第二出口连通至外部环境;并且,氢能模组还包括液位传感器,液位传感器安装于蓄水箱内并用于检测蓄水箱的最高蓄水液位,液位传感器和主控器电性连接,主控器在液位传感器检测到蓄水箱的最高蓄水液位控制第一出口关闭且打开第二出口。
20、本申请至少具有以下有益效果:
21、应用本申请提供的混动型机器人,通过锂电模组的锂电池直接向机器人负载提供所需的电能,使得机器人能够执行语音、视觉、运动等行为工作。锂电池不仅能够连接外部电源进行独立充电,而且,在机器人中增设了氢能模组,通过主控器检测锂电池的电量,当锂电池的电量降低达到阈值时,则主控器控制第一控制阀和反应电堆启动,此时氢气瓶中的氢气通过第一控制阀流入反应电堆进行发电,并通过将反应电堆和锂电池串联从而对锂电池进行充电,使锂电池的电量始终保持足够的电量来供给机器人负载,从而保证机器人负载正常执行工作。如此,相对现有的仅采用传统的锂电驱动的机器人而言,应用本申请提供的混动型机器人就能够大大提高机器人的续航能力。
22、而且,本申请提供的混动型机器人是采用氢能源进行反应发电来对锂电池进行充电,氢能源反应后的产物是水,是绝对的清洁能源,能够为实现绿色高质量经济发展提供有力支撑。
技术特征:
1.一种混动型机器人,包括:
2.根据权利要求1所述的混动型机器人,其特征在于,
3.根据权利要求2所述的混动型机器人,其特征在于,
4.根据权利要求3所述的混动型机器人,其特征在于,
5.根据权利要求2所述的混动型机器人,其特征在于,
6.根据权利要求2-5任一项所述的混动型机器人,其特征在于,
7.根据权利要求6所述的混动型机器人,其特征在于,
8.根据权利要求6所述的混动型机器人,其特征在于,
9.根据权利要求8所述的混动型机器人,其特征在于,
10.根据权利要求9所述的混动型机器人,其特征在于,
技术总结
本申请属于智能机器人设计及制造技术领域,尤其涉及一种混动型机器人。其中,混动型机器人包括:锂电模组与氢能模组,氢能模组和锂电模组串联连接,氢能模组用于对锂电池进行充电。其中,氢能模组包括:主控器,用于检测锂电池的电量。第一控制阀,用于控制反应电堆与氢气瓶之间的连接。反应电堆,反应电堆和锂电池串联来对锂电池进行充电,使锂电池的电量始终保持足够的电量来供给机器人负载,从而保证机器人负载正常执行工作。如此,相对现有的仅采用传统的锂电驱动的机器人而言,应用本申请提供的混动型机器人就能够大大提高机器人的续航能力。
技术研发人员:吴振东,罗浩,丁宏钰,付春江
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!