一种加工中心用的智能机械手的制作方法
本发明属于智能机械手,具体为一种加工中心用的智能机械手。
背景技术:
1、智能机械手是指对在工厂加工中心的加工过程中,对原有的机械手进行改进,使其可以被远程操控或者可以实现某些自动化功能的机械组件,智能机械手可以胜任一些劳动强度较大或者危险性较高的搬运工作。
2、现有技术的智能机械手主要包括机座、第一圆框、第一电机、辅助圆盘、第一矩形框、第二电机、控制箱、摄像头、机械臂和与机械臂相连接的夹持机构,使用过程中,摄像头可以将所需要夹持搬运的货物成像传递给控制箱内的中央处理器,进而在中央处理器的作用下,可以控制第一电机等部件进行角度调节,进而配合夹持机构进行夹持固定,方便搬运。
3、但是在夹持的过程中,两个夹持板之间的可调控距离一般是固定的,导致可以夹持的物体的长度或者尺寸范围有限,一般是按照所需要夹持物件的长度进行定制,但是在搬运过程中,常会因为保护搬运件,需要对搬运件进行外包装保护,而外包装保护常会导致物体的整体长度长于夹持板的可调节范围,进而影响夹持过程,十分不便,且在对矩形的电路板进行夹持和对圆管或者圆柱形物体进行夹持时,往往需要更换夹持头,需要多准备一个夹持头并重复拆卸安装,操作步骤繁多,费时费力。
技术实现思路
1、(一)解决的技术问题
2、为了克服现有技术的上述缺陷,本发明提供了一种加工中心用的智能机械手,解决了在夹持的过程中,两个夹持板之间的可调控距离一般是固定的,导致可以夹持的物体的长度或者尺寸范围有限,一般是按照所需要夹持物件的长度进行定制,但是在搬运过程中,常会因为保护搬运件,需要对搬运件进行外包装保护,而外包装保护常会导致物体的整体长度长于夹持板的可调节范围,进而影响夹持过程,十分不便,且在对矩形的电路板进行夹持和对圆管或者圆柱形物体进行夹持时,往往需要更换夹持头,需要多准备一个夹持头并重复拆卸安装,操作步骤繁多,费时费力的问题。
3、(二)技术方案
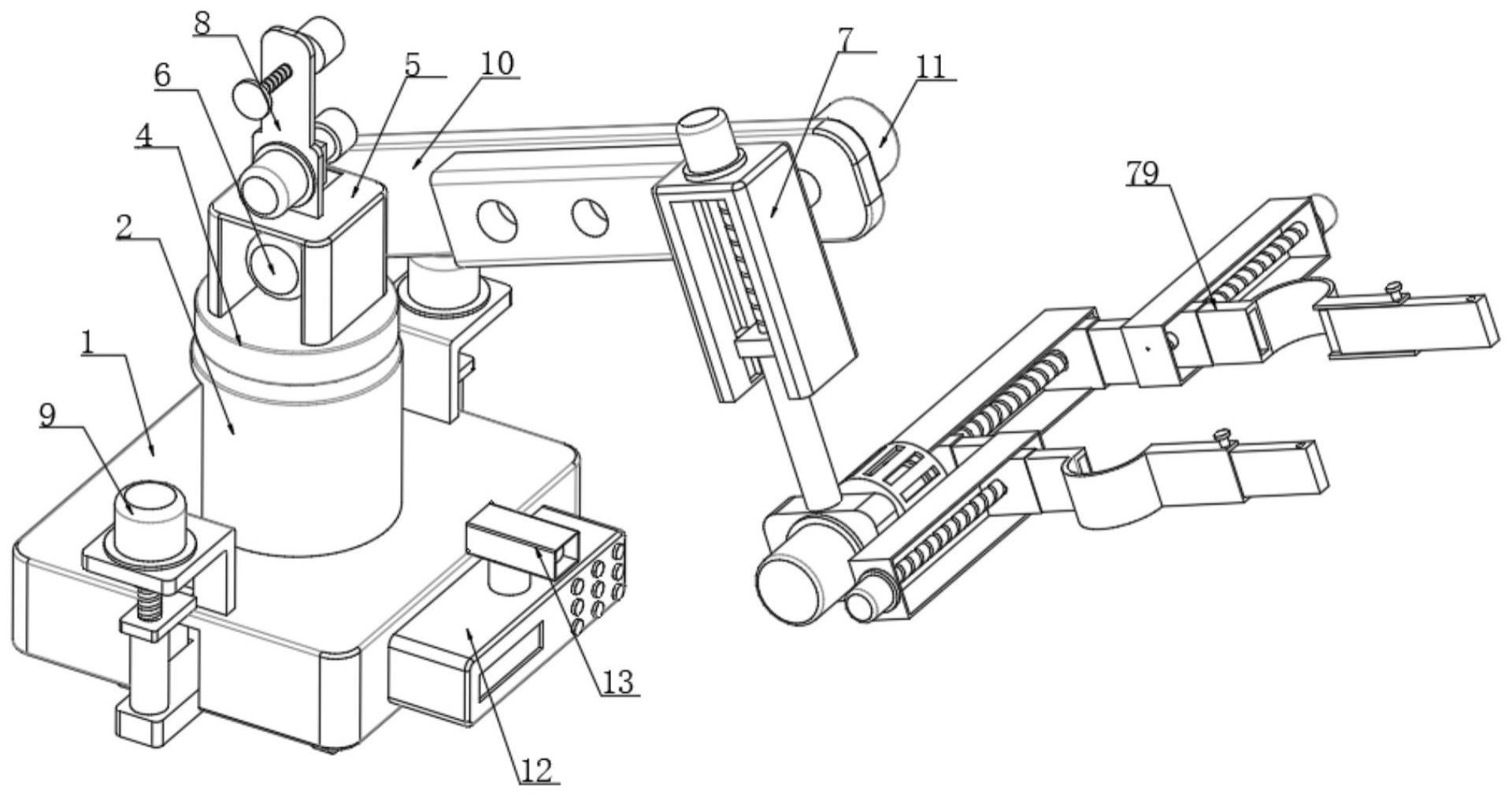
4、为实现上述目的,本发明提供如下技术方案:一种加工中心用的智能机械手,包括机座和多样夹持装置,其特征在于:所述机座的外表面顶部固定连接有第一圆框,所述第一圆框的内壁固定安装有第一电机,所述第一电机的输出端固定连接有辅助圆盘,所述辅助圆盘的外表面顶部固定连接有第一矩形框,所述第一矩形框的内壁一侧固定安装有第二电机,所述第二电机的输出端固定连接有机械臂,所述机械臂的外表面一侧固定安装有第三电机,所述第一矩形框与机械臂支架设置有辅助承力装置,所述机座的顶部与底部之间设置有移动稳固装置,所述机座的外表面一侧固定安装有控制箱,所述控制箱的顶部安装有摄像头。
5、所述多样夹持装置包括第二矩形框和可调节夹持结构,所述第二矩形框的外表面一侧与第三电机的输出端固定连接,所述第二矩形框的外表面顶部固定安装有第四电机,所述第四电机的输出端固定连接有第一螺纹杆,所述第一螺纹杆的外表面螺纹连接有第一螺纹筒,所述第一螺纹筒的外表面固定连接有第一矩形块,所述第一矩形块的外表面两侧均固定连接有第一燕尾滑块,所述第二矩形框的内壁两侧均开设有第一矩形槽,所述第一燕尾滑块的外表面与第一矩形槽的内壁滑动连接,所述第一螺纹筒的外表面底部固定连接有第一安装板,所述第一安装板的外表面一侧固定安装有第五电机。
6、作为本发明的进一步方案:所述可调节夹持结构包括第二圆框,所述第二圆框的外表面一侧与第五电机的输出端固定连接,所述第二圆框的外表面开设有矩形散热孔,所述第二圆框的外表面一侧固定连接有第三矩形框,所述第二圆框的内壁固定安装有第六电机,所述第六电机的输出端固定俩就有第二螺纹杆,所述第二螺纹杆的一端与第三矩形框的内壁一侧转动连接,所述第二螺纹杆的两端螺纹形状呈相反对称排列,所述第二螺纹杆的外表面对称螺纹连接有第一螺孔块。
7、作为本发明的进一步方案:所述第一螺孔块的外表面一侧固定连接有连接块,所述连接块的外表面一侧固定连接有第四矩形框,所述第四矩形框的外表面一侧固定安装有第七电机,所述第七电机的输出端固定连接有第三螺纹杆,所述第三螺纹杆的外表面螺纹连接有第二螺孔块。
8、作为本发明的进一步方案:所述第二螺孔块的外表面一侧固定连接有第一矩形夹持板,所述第一矩形夹持板的外表面一侧固定连接有半圆夹持板,所述半圆夹持板远离第一矩形夹持板的一侧固定连接有夹持框。
9、作为本发明的进一步方案:所述夹持框的内壁滑动连接有第二矩形夹持板,所述第二矩形夹持板的外表面一侧固定连接有矩形卡块,所述第一矩形夹持板的外表面一侧开设有矩形卡槽,所述矩形卡块的外表面大小和形状与矩形卡槽的内壁大小和形状相适配,所述夹持框的顶部内壁滑动插设有卡位杆,所述第二矩形夹持板的外表面顶部开设有卡位槽,所述卡位杆的外表面大小和形状与卡位槽的内壁大小和形状相适配。
10、作为本发明的进一步方案:所述辅助承力装置包括第二安装板,所述第二安装板的外表面底部与第一矩形框的外表面顶部固定连接,所述第二安装板的外表面一侧固定安装有第八电机,所述第八电机的输出端固定连接有第四螺纹杆,所述第四螺纹杆的外表面螺纹连接有第二螺纹筒,所述第二螺纹筒的外表面固定连接有第二矩形块,所述第二螺纹筒的外表面一侧固定连接有第一圆卡块,所述第一矩形框的顶部开设有第二矩形槽,所述第二矩形槽的内壁滑动连接有第二燕尾滑块,所述第二燕尾滑块的外表面与第二矩形块的外表面固定连接,所述机械臂的外表面一侧固定连接有辅助块,所述辅助块的一侧开设有第一圆卡孔,所述第一圆卡块的外表面大小和形状与第一圆卡孔的内壁大小和形状相适配。
11、作为本发明的进一步方案:所述第二安装板的外表面顶部固定连接有第三安装板,所述第三安装板的内壁螺纹连接有第五螺纹杆,所述第五螺纹杆的一端固定连接有第二圆卡块,所述辅助块的外表面位于第一圆卡孔的一侧开设有第二圆卡孔,所述第二圆卡孔的内壁大小和形状与第二圆卡块的外表面大小和形状相适配。
12、作为本发明的进一步方案:所述移动稳固装置包括l形板,所述l形板的外表面底部与机座的外表面顶部固定连接,所述l形板的外表面顶部固定连接有第九电机,所述第九电机的输出端固定连接有第六螺纹杆,所述第六螺纹杆的外表面螺纹连接有第三螺纹筒,所述第三螺纹筒的外表面固定连接有第三矩形块,所述l形板的内壁一侧开设有第三矩形槽,所述第三矩形槽的内壁滑动连接有第三燕尾滑块,所述第三燕尾滑块的外表面与第三矩形块的外表面固定连接。
13、作为本发明的进一步方案:所述第三螺纹筒的外表面底部固定连接有第一矩形杆,所述第一矩形杆的外表面两侧均固定连接有第二矩形杆,所述第二矩形杆的两端分别固定连接有圆形块,所述圆形块的底部安装有滚轮,所述机座的底部开设有第一矩形收纳槽,所述第一矩形收纳槽的两侧对称开设有两个第二矩形收纳槽,所述第二矩形收纳槽的一侧开设有圆形槽,所述第一矩形收纳槽的内壁大小和形状与第一矩形杆的外表面大小和形状相适配,所述第二矩形收纳槽的内壁大小和形状与第二矩形杆的外表面大小和形状相适配,所述圆形槽的内壁大小和形状与圆形块的外表面大小和形状相适配。
14、作为本发明的进一步方案:所述控制箱的内部设置有中央处理器,所述中央处理器的输入端与摄像头的输出端电性连接,所述中央处理器的输出端电性连接有信息筛选模块,所述信息筛选模块的输出端电性连接有距离测算模块,所述距离测算模块的输出端电性连接有数据分析模块,所述数据分析模块的输出端分别电性连接有第一控制模块和第二控制模块,所述第一控制模块的输出端分别与第一电机、第二电机和第三电机的输入端电性连接,所述第二控制模块的输出端分别与第四电机、第五电机、第六电机和第七电机的输入端电性连接。
15、(三)有益效果
16、与现有技术相比,本发明的有益效果在于:
17、1、本发明通过设置多样夹持装置,在第一螺纹杆和第二螺纹杆的作用下,可以带动第一螺纹筒和第一螺孔块运动,第一螺纹筒运动可以调节第一安装板与第二矩形框之间的距离,进而可以调节第一矩形夹持板、半圆夹持板和第二矩形夹持板等部件距离第二矩形框的距离,此时配合第一螺孔块,使得两个第一矩形夹持板、半圆夹持板和第二矩形夹持板等部件可以相向运动,进而方便对待夹持物体进行夹持,在第三螺纹杆和第二螺孔块的作用下,使得第一矩形夹持板、半圆夹持板和第二矩形夹持板的位置可以调节,进而在配合第二螺纹杆和第一螺孔块发挥夹持作用时,其有效的夹持范围可以变大,进而可以对最大可夹持尺寸进行增加,满足对含有外包装保护的物品进行夹持,在第一矩形夹持板、半圆夹持板和第二矩形夹持板的作用下,可以夹持平整外观的物品或者圆管形或者圆轴形的物品进行夹持,无需更换夹持头。
18、2、本发明通过设置辅助承力装置,在机械臂不使用时,机械臂包括其上安装的多样夹持装置都是依靠机械臂和第一矩形框之间的连接组件进行支撑,由于重量较大,容易发生弯折或者损坏,此时在第四螺纹杆配合第二螺纹筒的作用下,可以带动第一圆卡块与第一圆卡孔进行固定,并在第五螺纹杆的作用下,使得第二圆卡块与第二圆卡孔进行固定,进而使得第二安装板、第三安装板、第二螺纹筒、第二矩形块和第二燕尾滑块都可以承担机械臂的受到的压力,进而避免机械臂与第二电机的连接处弯折、断裂或者损坏。
19、3、本发明通过设置移动稳固装置,机械臂往往直接放置在地面上,移动和搬运地方都需要使用吊具等进行辅助,此时在第六螺纹杆的作用下可以带动第三螺纹筒运动,进而可以带动第一矩形杆运动,进而可以带动第二矩形杆和圆形块运动,使得滚轮可以从底部的圆形槽内被顶出,方便移动。
- 还没有人留言评论。精彩留言会获得点赞!