一种多机器人同时与一个外部工装协同方法、介质及系统与流程
本发明涉及焊接机器人,尤其涉及一种多机器人同时与一个外部工装协同方法、介质及系统。
背景技术:
1、随着科技的发展,工业机器人的应用场景越来越多,越来越复杂。在一些应用中出现了多台机器人与同一外部轴协同的方案。如一个工件摆在外部工装,工件两端分别由两台机器人同时焊接。外部工装与机器人协同工作时,外部工装由机器人控制运动,在此应用中就产生了一个问题:两台机器人同时与一个外部工装协同工作,外部工装由哪一台机器人来控制。目前机器人焊接领域多为机器人单独施焊,一个外部工装与多台机器人协同鲜有报道,因此有必要设计一种多机器人同时与一个外部工装协同方法,以提高生产效率。
技术实现思路
1、本发明提供了一种多机器人同时与一个外部工装协同方法、介质及系统,以打破在一台控制器中,一台机器人只能与一台工装协同的限制,使多台机器人可以同时与同一工装协同工作,增加工作效率,降低工厂成本。
2、本发明采用的技术方案是:提供一种多机器人同时与一个外部工装协同方法,包括:
3、s1:同一控制器控制多台机器人和外部工装,机器人包括一个主机器人和至少一个从机器人;主机器人控制外部工装的轨迹动作,主机器人在外部工装上建立用户坐标系;建立用户坐标系和世界坐标系之间的联系;建立主机器人基坐标系与世界坐标系的联系;建立从机器人基坐标系与世界坐标系的联系;
4、s2:对主机器人、从机器人、外部工装分别在用户坐标系下建立运动轨迹;将其分解为若干个插补周期;主机器人和从机器人的运动轨迹中含有外部工装的轨迹点位信息;
5、s3:计算主机器人一个插补周期后其基坐标系下的末端位姿,反解得到关节值;发送关节值到伺服控制系统;
6、s4:根据一个插补周期后计算得到的新用户坐标系,再计算从机器人一个插补周期后其基坐标系下的末端位姿,反解得到关节值;发送关节值到伺服控制系统;
7、s5:重复s3和s4的插补过程,直至插补结束。
8、在一些实施例中,所述s1中,主机器人在外部工装上建立用户坐标系的方法包括:
9、在外部工装选定一标记点,转动外部工装的角度,记录一次主机器人末端在该标记点的点位信息;多次转动外部工装的角度,获得多个点位信息;进而计算出主机器人基坐标系下的用户坐标系。
10、在一些实施例中,所述s1中,建立用户坐标系和世界坐标系之间的联系的方法包括:
11、根据用户坐标系在主机器人基坐标系下的转化矩阵,计算用户坐标系和世界坐标系之间的转化矩阵,确定用户坐标系在世界坐标系下的位置。
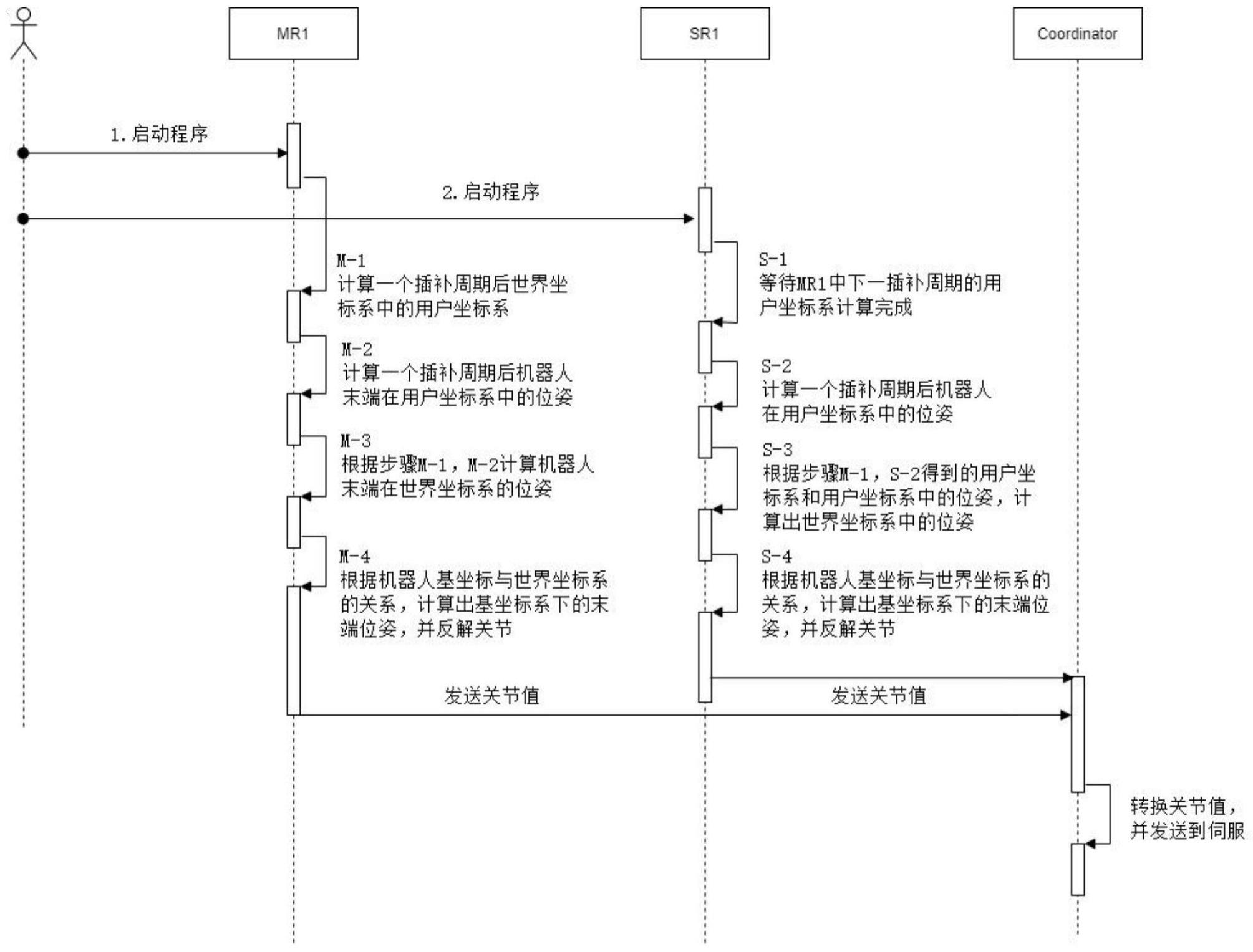
12、在一些实施例中,所述s3包括:
13、s3.1:计算一个插补周期后世界坐标系中的用户坐标系;
14、s3.2:计算一个插补周期主机器人末端在用户坐标系中的位姿;
15、s3.3:根据s3.1和s3.2计算主机器人末端在世界坐标系的位姿;
16、s3.4:计算主机器人基坐标系与世界坐标系的矩阵转化关系,计算出主机器人在其基坐标系下的末端位姿;反解得到关节值。
17、在一些实施例中,所述s4包括:
18、s4.1:计算一个插补周期从机器人末端在用户坐标系中的位姿;
19、s4.2:获取一个插补周期后世界坐标系中的用户坐标系;
20、s4.3:根据s4.1和s4.2计算从机器人末端在世界坐标系的位姿;
21、s4.4:计算从机器人基坐标系与世界坐标系的矩阵转化关系,计算出从机器人在其基坐标系下的末端位姿;反解得到关节值。
22、本发明还提供一种计算机存储介质,其上存储有计算机可读指令,当所述计算机可读指令被控制器的处理器执行时,使控制器执行上述的协同方法。
23、本发明还提供一种多机器人同时与一个外部工装协同系统,所述系统包括一个控制器,多个机器人、一个外部工装以及现场总线,所述控制器通过现场总线与所述多个机器人和一个外部工装相连以执行上述的协同方法。
24、本发明的有益效果是:本发明基于一台控制器控制多机器人和外部工装的目的,提供了一种简易的控制方法来实现该目的;简易的控制方法不仅缩短了开发时间,同时也能提高系统运行效率,有效的提高机器人的控制节拍;基于复杂系统易出现故障,简易的控制系统无疑会减少出现故障的可能,在实际的测试过程中,耐压实验的结果显示该方法测试耐压性好,能通过所有的测试用例。传统的方法是多控制器中,一台机器人只能与一台工装协同,若需要多机器人与外部工装协同时,在硬件上会有多套控制器,布线增加,会增大硬件成本;若采用多套控制器,无疑无法采用本申请所述这一简易逻辑运算的协同方法,必然需要涉及一套复杂的协同方法才能实现协同控制的目的。通过使用同一控制器实现使多台机器人可以同时与同一工装协同工作的目的,增加工作效率,降低工厂成本。
技术特征:
1.一种多机器人同时与一个外部工装协同方法,其特征在于,包括:
2.根据权利要求1所述的多机器人同时与一个外部工装协同方法,其特征在于,所述s1中,主机器人在外部工装上建立用户坐标系的方法包括:
3.根据权利要求2所述的多机器人同时与一个外部工装协同方法,其特征在于,所述s1中,建立用户坐标系和世界坐标系之间的联系的方法包括:
4.根据权利要求1所述的多机器人同时与一个外部工装协同方法,其特征在于,所述s3包括:
5.根据权利要求1所述的多机器人同时与一个外部工装协同方法,其特征在于,所述s4包括:
6.一种计算机存储介质,其上存储有计算机可读指令,当所述计算机可读指令被控制器的处理器执行时,使控制器执行如权利要求1-5中任意一项所述的协同方法。
7.一种多机器人同时与一个外部工装协同系统,其特征在于,所述系统包括一个控制器,多个机器人、一个外部工装以及现场总线,所述控制器通过现场总线与所述多个机器人和一个外部工装相连以执行如权利要求1-5中任意一项所述的协同方法。
技术总结
本发明公开了一种多机器人同时与一个外部工装协同方法、介质及系统,该方法包括:主机器人在外部工装上建立用户坐标系,建立起主机器人与外部工装的联系;主机器人和从机器人均具有与世界坐标系的转化关系,基坐标系和用户坐标系分别与世界坐标系有联系,计算得到基坐标系与用户坐标系之间的变换关系。主机器人、从机器人和外部工装分别在用户坐标系下建立运动轨迹,主机器人根据运动轨迹规划计算出下一个插补周期外部工装的关节变化量,从而得到变化后的用户坐标系,从机器人根据变化后用户坐标系和世界坐标系计算得到从机器人末端下一个插补周期在世界坐标系下的点位信息。本发明使多台机器人可以同时与同一工装协同工作,增加了工作效率。
技术研发人员:黄贵良,张正波
受保护的技术使用者:成都卡诺普机器人技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!