一种便于调节下料尺寸的保利龙下料机的制作方法
1.本实用新型涉及保利龙下料机技术领域,尤其涉及一种便于调节下料尺寸的保利龙下料机。
背景技术:
2.在保利龙模型加工中,需要根据产品的尺寸,在雕刻前进行下料,一般通过电热丝下料机进行切割下料。
3.现有技术中,电热丝下料机不够自动化,从而使得切割下料不便操作,并且在调节尺寸时,一般都是通过人工测量,之后进行标记,从而在后续切割时,工作人员需要对照标记进行切割,因此使得操作麻烦。
4.针对以上技术问题,本实用新型公开了一种便于调节下料尺寸的保利龙下料机,本实用新型具有切割下料时,在进行调节尺寸和切割下料的工作时,更加自动化,从而使得工作更加方便等优点。
技术实现要素:
5.本实用新型的目的在于克服现有技术的不足,提供了一种便于调节下料尺寸的保利龙下料机,以解决现有技术中电热丝下料机不够自动化,从而使得切割下料不便操作,并且在调节尺寸时,一般都是通过人工测量,从而使得操作麻烦等技术问题,本实用新型具有切割下料时,在进行调节尺寸和切割下料的工作时,更加自动化,从而使得工作更加方便等优点。
6.本实用新型通过以下技术方案实现:本实用新型公开了一种便于调节下料尺寸的保利龙下料机,包括固定框,固定框的下方固定设置有支腿,且支腿至少设置有四个,固定框上端面的前端与后端均固定设置有支撑架,固定框上端面的两侧均固定设置有限位滑杆,支撑架的上方固定设置有承重座,且承重座至少设置有两个,承重座与固定框之间的前端和后端均设置有移动座,移动座通过移动驱动机构可移动的设置在固定框的上方,承重座与固定框之间前端移动座的上方设置有第一下料调节机构,承重座与固定框之间后端的移动座的上方设置有第二下料调节机构,第一下料调节机构的内部设置有第一测距机构,第二下料调节机构的前端设置有第二测距机构,第一下料调节机构与第二下料调节机构的一侧设置有第三测距机构,固定框上方一侧的承重座上端面固定设置有第一基准板,承重座上端面的前端固定设置有第二基准板。
7.进一步的,移动驱动机构包括齿牙座、啮合齿牙、凹形块、限位滚轮、连接轴、连接块、啮合齿轮、转轴和第一驱动电机,齿牙座设置在固定框上端面两侧的限位滑杆之间,且齿牙座的两端与固定框的外壁固定连接,齿牙座的上端面固定设置有啮合齿牙,且啮合齿牙设置有多个,凹形块设置有两个,两个凹形块分别固定设置在移动座下端面的两侧,限位滚轮设置有两个,两个限位滚轮分别位于凹形块的凹形槽的内部,限位滚轮通过连接轴与凹形块的凹槽内壁转动连接,限位滚轮的凹槽卡接在限位滑杆的外部,移动座的下端面固
定设置有连接块,且连接块设置有两个,啮合齿轮位于连接块之间,啮合齿轮通过转轴与连接块转动连接,啮合齿轮与齿牙座上方的啮合齿牙啮合连接,第一驱动电机安装在连接块的一侧,且第一驱动电机的输出端与转轴的一端固定连接。
8.进一步的,第一下料调节机构包括第一支撑板、第一丝杆、第一移动块、第一导体架、第一电热丝、第一从动锥齿轮、第一传动轴、第一轴承座和第一主动锥齿轮,第一支撑板设置有两个,两个第一支撑板分别固定设置在移动座上端面的两侧,第一支撑板之间设置有第一丝杆,且第一丝杆设置有两个,两个第一丝杆分别位于第一支撑板之间的上方与下方,第一丝杆的外部螺纹连接有第一移动块,第一支撑板之间上方与下方的第一移动块相向的一侧分别固定设置有第一导体架,第一支撑板之间上方与下方的第一移动块之间设置有第一电热丝,且第一电热丝的两端分别与第一导体架电性连接,第一丝杆的一端固定设置有第一从动锥齿轮,移动座上端面一侧的第一支撑板一侧设置有第一传动轴,第一传动轴通过第一轴承座可转动的设置在第一支撑板的一侧,第一传动轴的外壁固定设置有第一主动锥齿轮,且第一主动锥齿轮与第一从动锥齿轮啮合连接。
9.进一步的,第一支撑板之间固定设置有限位杆,且限位杆设置有两个,第一移动块的内部开设有限位槽,且第一移动块通过限位槽滑动套接在限位杆的外部,第一电热丝位于支撑架上方的承重座之间,移动座的一侧固定安装有第二驱动电机,且第二驱动电机的输出端与第一传动轴的一端固定连接。
10.进一步的,第二下料调节机构包括第二支撑板、第二丝杆、第二移动块、第二导体架、第二电热丝、第二从动锥齿轮、第二传动轴、第二轴承座和第二主动锥齿轮,第二支撑板设置有两个,两个第二支撑板分别位于移动座上端面的两侧,第二丝杆设置有两个,且第二丝杆通过轴承可转动的设置在第二支撑板的一侧,第二丝杆的外部螺纹连接有第二移动块,移动座上方两侧的第二移动块相向的一侧均固定设置有第二导体架,第二导体架之间设置有第二电热丝,且第二电热丝的两端分别与第二导体架上的导体杆电性连接,第二丝杆的一端固定设置有第二从动锥齿轮,移动座的上方设置有第二传动轴,第二传动轴通过第二轴承座可转动的设置在第二支撑板的上方,第二传动轴的外壁固定套接有第二主动锥齿轮,且第二主动锥齿轮设置有两个,两个第二主动锥齿轮分别与第二从动锥齿轮啮合连接。
11.进一步的,第二丝杆的前端与后端均设置有限位轴,且限位轴固定设置在第二支撑板的一侧,第二移动块的内部开设有限位滑孔,第二移动块通过限位滑孔滑动套接在限位轴的外部,移动座上方一侧的第二支撑板一侧端面固定安装有第三驱动电机,且第三驱动电机的输出端与第二传动轴的一端固定连接,第三驱动电机的下方设置有电控箱,且电控箱固定安装在第二支撑板的一侧。
12.进一步的,第一测距机构包括第一反射板、通孔、安装块和第一激光测距仪,第一反射板固定套接在限位杆的外部,且第一反射板的一侧端面第一基准板的一侧端面处于同一竖平面,通孔开设在第一反射板的内部,且第一反射板通过通孔套接在第一丝杆的外部,通孔的内径大于第一丝杆的外径,安装块固定设置在第一移动块的一侧端面,第一激光测距仪固定安装在安装块的一侧,第一激光测距仪的测距激光与反射板处于同一水平线,第一激光测距仪的激光测量起点与第一电热丝处于同一竖平面。
13.进一步的,第二测距机构包括第二反射板、安装架和第二激光测距仪,第二反射板
固定设置在第二支撑板的前端面,且第二反射板的上端面与承重座的上端面处于同一水平面,安装架位于第二反射板的上方,且安装架与第二支撑板固定连接,第二激光测距仪固定安装在安装架的前端,第二激光测距仪的测距激光与第二反射板处于同一竖平线,第二激光测距仪的激光测量起点与第二电热丝处于同一水平面。
14.进一步的,第三测距机构包括第三反射板、固定架和第三激光测距仪,第三反射板固定设置在第二基准板的一侧端面,且第三反射板的后端面与第二基准板的后端面处于同一竖平面,固定架位于第三反射板的后端,且固定架固定设置在第二支撑板的一侧,第三激光测距仪固定安装在固定架的一侧,且第三激光测距仪的测距激光与第三反射板处于同一水平线,第三激光测距仪的测距激光起点与第二电热丝处于同一竖平面。
15.本实用新型具有以下优点:
16.(1)本实用新型通过固定框、承重座、移动座、移动驱动机构、第一下料调节机构、第二下料调节机构、第二驱动电机和第三驱动电机,从而使得在需要进行切割下料时,可以直接将原料放置在承重座的上方,之后需要对原料的长度进行切割时,可以通过启动固定框上方移动座下方的第一驱动电机,第一驱动电机带动转轴转动,转轴带动啮合齿轮转动,由于啮合齿轮与齿牙座上的啮合齿牙啮合连接,因此当第一驱动电机启动时,可以通过啮合齿轮与啮合齿牙的配合使得移动座进行移动,因此通过限位滚轮和限位滑杆的限位,可以使得移动座在固定框的上方进行纵向移动,从而可以使得移动座带动第二电热丝移动至需要切割的长度位置,之后启动第三驱动电机,第三驱动电机带动第二传动轴转动,第二传动轴通过第二主动锥齿轮和第二从动锥齿轮带动第二丝杆转动,从而通过螺纹传递的原理使得第二移动块下移并且带动第二电热丝下移,从而通过第二电热丝对原料进行切割,使得原料被切断,从而得到需要的长度,而需要切割厚度时,通过启动第三驱动电机,当第二电热丝下移切割至需要的厚度时,停止第二电热丝的下移,之后启动第一驱动电机,从而使得第二电热丝纵向移动,因此切割出需要的厚度材料,而需要切割宽度时,只需启动第二驱动电机,使得第一传动轴带动两个第一丝杆转动,从而使得第一电热丝横向移动,当第一电热丝到达需要的宽度位置时,停止第一电热丝的横向移动,之后启动第一电热丝所在的移动座下方的第一驱动电机,从而使得移动座纵向移动,因此切割出所需要的宽度的材料,因此在进行切割下料工作时,只需将原料放置在承重座的上方,之后下料只需启动第一驱动电机、第二驱动电机和第三驱动电机即可,从而使得工作更加自动化,更加方便,便于下料工作。
17.(2)本实用新型通过设置第一测距机构、第二测距机构和第三测距机构,通过第一激光测距仪、第二激光测距仪、第三激光测距仪、第一反射板、第二反射板和第三反射板的设置,并且配合移动座、第一电热丝和第二电热丝的移动,从而可以通过激光测距进行切割长度的测量,使得测距更加方便和便于读取,无需通过工作人员手工测量,使得测距工作更加方便。
附图说明
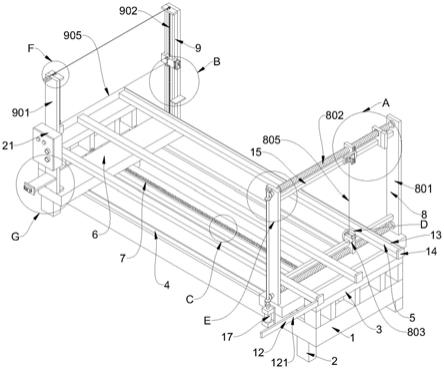
18.图1为本实用新型的整体立体结构示意图;
19.图2为本实用新型的固定框结构示意图;
20.图3为本实用新型图1的a处局部放大结构示意图;
21.图4为本实用新型图1的b处局部放大结构示意图;
22.图5为本实用新型图1的c处局部放大结构示意图;
23.图6为本实用新型的啮合齿轮与齿牙座侧视结构示意图;
24.图7为本实用新型的移动座与啮合齿轮正面结构示意图;
25.图8为本实用新型图1的d处局部放大结构示意图;
26.图9为本实用新型图1的e处局部放大结构示意图;
27.图10为本实用新型的第一移动块立体结构示意图;
28.图11为本实用新型图1的f处局部放大结构示意图;
29.图12为本实用新型图1的g处局部放大结构示意图。
30.图中:1、固定框;2、支腿;3、支撑架;4、限位滑杆;5、承重座;6、移动座;7、移动驱动机构;8、第一下料调节机构;9、第二下料调节机构;10、第一测距机构;11、第二测距机构;12、第三测距机构;13、第一基准板;14、第二基准板;15、限位杆;16、限位槽;17、第二驱动电机;18、限位轴;19、限位滑孔;20、第三驱动电机;21、电控箱;701、齿牙座;702、啮合齿牙;703、凹形块;704、限位滚轮;705、连接轴;706、连接块;707、啮合齿轮;708、转轴;709、第一驱动电机;801、第一支撑板;802、第一丝杆;803、第一移动块;804、第一导体架;805、第一电热丝;806、第一从动锥齿轮;807、第一传动轴;808、第一轴承座;809、第一主动锥齿轮;901、第二支撑板;902、第二丝杆;903、第二移动块;904、第二导体架;905、第二电热丝;906、第二从动锥齿轮;907、第二传动轴;908、第二轴承座;909、第二主动锥齿轮;101、第一反射板;102、通孔;103、安装块;104、第一激光测距仪;111、第二反射板;112、安装架;113、第二激光测距仪;121、第三反射板;122、固定架;123、第三激光测距仪。
具体实施方式
31.下面对本实用新型的实施例作详细说明,本实施例在以本实用新型技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例,在本实用新型的描述中,类似于“前”、“后”、“左”、“又”等指示方位或位置关系的词语仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
32.实施例1
33.实施例1公开了一种便于调节下料尺寸的保利龙下料机,包括固定框1,如图1-4所示,固定框1的下方固定设置有支腿2,且支腿2至少设置有四个,通过设置支腿2,从而通过支腿2对固定框1进行支撑,固定框1上端面的前端与后端均固定设置有支撑架3,固定框1上端面的两侧均固定设置有限位滑杆4,支撑架3的上方固定设置有承重座5,且承重座5至少设置有两个,具体的,承重座5设置有三个,通过设置承重座5,从而通过承重座5对原料进行支撑,承重座5与固定框1之间的前端和后端均设置有移动座6,移动座6通过移动驱动机构7可移动的设置在固定框1的上方,承重座5与固定框1之间前端移动座6的上方设置有第一下料调节机构8,承重座5与固定框1之间后端的移动座6的上方设置有第二下料调节机构9,第一下料调节机构8的内部设置有第一测距机构10,第二下料调节机构9的前端设置有第二测距机构11,第一下料调节机构8与第二下料调节机构9的一侧设置有第三测距机构12,固定框1上方一侧的承重座5上端面固定设置有第一基准板13,承重座5上端面的前端固定设置
有第二基准板14;如图1、图2、图5、图6和图7所示,移动驱动机构7包括齿牙座701、啮合齿牙702、凹形块703、限位滚轮704、连接轴705、连接块706、啮合齿轮707、转轴708和第一驱动电机709,齿牙座701设置在固定框1上端面两侧的限位滑杆4之间,且齿牙座701的两端与固定框1的外壁固定连接,齿牙座701的上端面固定设置有啮合齿牙702,且啮合齿牙702设置有多个,凹形块703设置有两个,两个凹形块703分别固定设置在移动座6下端面的两侧,限位滚轮704设置有两个,两个限位滚轮704分别位于凹形块703的凹形槽的内部,限位滚轮704通过连接轴705与凹形块703的凹槽内壁转动连接,限位滚轮704的凹槽卡接在限位滑杆4的外部,通过设置限位滚轮704和限位滑杆4,从而使得限位滚轮704可以在限位滑杆4的外部进行滚动,并且通过限位滚轮704和限位滑杆4的配合对移动座6的移动进行限位,移动座6的下端面固定设置有连接块706,且连接块706设置有两个,啮合齿轮707位于连接块706之间,啮合齿轮707通过转轴708与连接块706转动连接,啮合齿轮707与齿牙座701上方的啮合齿牙702啮合连接,第一驱动电机709安装在连接块706的一侧,且第一驱动电机709的输出端与转轴708的一端固定连接;如图1、图3、图8、图9和图10所示,第一下料调节机构8包括第一支撑板801、第一丝杆802、第一移动块803、第一导体架804、第一电热丝805、第一从动锥齿轮806、第一传动轴807、第一轴承座808和第一主动锥齿轮809,第一支撑板801设置有两个,两个第一支撑板801分别固定设置在移动座6上端面的两侧,第一支撑板801之间设置有第一丝杆802,且第一丝杆802设置有两个,两个第一丝杆802分别位于第一支撑板801之间的上方与下方,第一丝杆802的外部螺纹连接有第一移动块803,具体的,第一移动块803的内部开设有螺纹孔,第一移动块803通过螺纹孔与第一丝杆802螺纹连接,第一支撑板801之间上方与下方的第一移动块803相向的一侧分别固定设置有第一导体架804,第一支撑板801之间上方与下方的第一移动块803之间设置有第一电热丝805,且第一电热丝805的两端分别与第一导体架804电性连接,具体的,第一电热丝805的两端分别与第一导体架804上的导电杆电性连接,且第一电热丝805与第一导体架804上的导电杆为可拆卸连接,而导电杆可以通过导线与电控箱21进行电性连接,第一丝杆802的一端固定设置有第一从动锥齿轮806,移动座6上端面一侧的第一支撑板801一侧设置有第一传动轴807,第一传动轴807通过第一轴承座808可转动的设置在第一支撑板801的一侧,第一传动轴807的外壁固定设置有第一主动锥齿轮809,且第一主动锥齿轮809与第一从动锥齿轮806啮合连接;第一支撑板801之间固定设置有限位杆15,且限位杆15设置有两个,第一移动块803的内部开设有限位槽16,且第一移动块803通过限位槽16滑动套接在限位杆15的外部,具体的,限位杆15和限位槽16均为方形,从而通过限位杆15和限位槽16的配合对第一移动块803的移动进行限位,第一电热丝805位于支撑架3上方的承重座5之间,移动座6的一侧固定安装有第二驱动电机17,且第二驱动电机17的输出端与第一传动轴807的一端固定连接;如图1、图4和图11所示,第二下料调节机构9包括第二支撑板901、第二丝杆902、第二移动块903、第二导体架904、第二电热丝905、第二从动锥齿轮906、第二传动轴907、第二轴承座908和第二主动锥齿轮909,第二支撑板901设置有两个,两个第二支撑板901分别位于移动座6上端面的两侧,第二丝杆902设置有两个,且第二丝杆902通过轴承可转动的设置在第二支撑板901的一侧,具体的,第二支撑板901一侧端面的上方与下方均固定设置有轴承座,第二丝杆902的两端分别与轴承座通过轴承转动连接,第二丝杆902的外部螺纹连接有第二移动块903,移动座6上方两侧的第二移动块903相向的一侧均固定设置有第二导体架904,第二导体架904之间设置有第
二电热丝905,且第二电热丝905的两端分别与第二导体架904上的导体杆电性连接,第二丝杆902的一端固定设置有第二从动锥齿轮906,移动座6的上方设置有第二传动轴907,第二传动轴907通过第二轴承座908可转动的设置在第二支撑板901的上方,第二传动轴907的外壁固定套接有第二主动锥齿轮909,且第二主动锥齿轮909设置有两个,两个第二主动锥齿轮909分别与第二从动锥齿轮906啮合连接;第二丝杆902的前端与后端均设置有限位轴18,且限位轴18固定设置在第二支撑板901的一侧,具体的,限位轴18的两端分别与第二支撑板901一侧端面上方与下方的轴承座固定连接,第二移动块903的内部开设有限位滑孔19,第二移动块903通过限位滑孔19滑动套接在限位轴18的外部,移动座6上方一侧的第二支撑板901一侧端面固定安装有第三驱动电机20,且第三驱动电机20的输出端与第二传动轴907的一端固定连接,第三驱动电机20的下方设置有电控箱21,且电控箱21固定安装在第二支撑板901的一侧;如图1和图3所示,第一测距机构10包括第一反射板101、通孔102、安装块103和第一激光测距仪104,第一反射板101固定套接在限位杆15的外部,且第一反射板101的一侧端面第一基准板13的一侧端面处于同一竖平面,通过将第一反射板101的一侧端面第一基准板13的一侧端面处于同一竖平面,从而可以使得第一基准板13的一侧端面代表原料的一侧端面,在摆放原料时,使得原料的一侧端面与第一基准板13的一侧端面贴合,通孔102开设在第一反射板101的内部,且第一反射板101通过通孔102套接在第一丝杆802的外部,通孔102的内径大于第一丝杆802的外径,安装块103固定设置在第一移动块803的一侧端面,第一激光测距仪104固定安装在安装块103的一侧,第一激光测距仪104的测距激光与反射板处于同一水平线,第一激光测距仪104的激光测量起点与第一电热丝805处于同一竖平面;如图1和图4所示,第二测距机构11包括第二反射板111、安装架112和第二激光测距仪113,第二反射板111固定设置在第二支撑板901的前端面,且第二反射板111的上端面与承重座5的上端面处于同一水平面,通过将第二反射板111的上端面与承重座5的上端面设置为处于同一水平面,从而使得第二反射板111的上端面代表原料的下端面,安装架112位于第二反射板111的上方,且安装架112与第二支撑板901固定连接,第二激光测距仪113固定安装在安装架112的前端,第二激光测距仪113的测距激光与第二反射板111处于同一竖平线,第二激光测距仪113的激光测量起点与第二电热丝905处于同一水平面;如图1和图12所示,第三测距机构12包括第三反射板121、固定架122和第三激光测距仪123,第三反射板121固定设置在第二基准板14的一侧端面,且第三反射板121的后端面与第二基准板14的后端面处于同一竖平面,固定架122位于第三反射板121的后端,且固定架122固定设置在第二支撑板901的一侧,第三激光测距仪123固定安装在固定架122的一侧,且第三激光测距仪123的测距激光与第三反射板121处于同一水平线,第三激光测距仪123的测距激光起点与第二电热丝905处于同一竖平面,由于第三反射板121的后端面与第二基准板14的后端面处于同一竖平面,而第二电热丝905与第三激光测距仪123的激光起点处于同一竖平面,因此通过第三激光测距仪123与第三反射板121的配合对第二电热丝905和原料的一端距离进行测量,当第三激光测距仪123显示的长度达到所需要的长度时,直接停止移动座6的移动,从而可以使得移动座6带动第二电热丝905移动至需要切割的长度位置。
34.本实用新型的原理如下:本实用新型在需要进行下料工作时,可以直接将原料放置在承重座5的上方,之后将第一导体架804和第二导体架904进行通电,从而使得第一电热丝805和第二电热丝905升温,之后需要对原料的长度进行切割时,可以通过启动第二电热
丝905所在的移动座6下方的第一驱动电机709,第一驱动电机709带动转轴708转动,转轴708带动啮合齿轮707转动,由于啮合齿轮707与齿牙座701上的啮合齿牙702啮合连接,因此当第一驱动电机709启动时,可以通过啮合齿轮707与啮合齿牙702的配合使得移动座6进行移动,因此通过限位滚轮704和限位滑杆4的限位,可以使得移动座6在固定框1的上方进行纵向移动,而同时可以启动第三激光测距仪123,第三激光测距仪123发射的测距激光会照射至第三反射板121处,因此当移动座6带动第二支撑板901纵向移动时,第三激光测距仪123也会进行移动,由于第三反射板121的后端面与第二基准板14的后端面处于同一竖平面,而第二电热丝905与第三激光测距仪123的激光起点处于同一竖平面,因此通过第三激光测距仪123与第三反射板121的配合对第二电热丝905和原料的一端距离进行测量,当第三激光测距仪123显示的长度达到所需要的长度时,直接停止移动座6的移动,从而可以使得移动座6带动第二电热丝905移动至需要切割的长度位置,之后启动第三驱动电机20,第三驱动电机20带动第二传动轴907转动,第二传动轴907通过第二主动锥齿轮909和第二从动锥齿轮906带动第二丝杆902转动,从而通过螺纹传递的原理使得第二移动块903下移并且带动第二电热丝905下移,从而通过第二电热丝905对原料进行切割,使得原料被切断,从而得到需要的长度,而需要切割厚度时,同样通过启动第三驱动电机20,使得第二电热丝905下移,同时可以通过第二激光测距仪113与第二反射板111的配合对第二电热丝905和承重座5上端面之间的距离进行测量,当第二激光测距仪113显示达到所需要的厚度时,停止第二电热丝905的下移,因此可以对厚度进行定位,而需要切割宽度时,只需启动第二驱动电机17,使得第一传动轴807通过第一主动锥齿轮809和第一从动锥齿轮806带动两个第一丝杆802转动,从而使得第一移动块803带动第一电热丝805横向移动,同时通过第一激光测距仪104和第一反射板101的配合对第一电热丝805和原料的一侧外壁之间的距离进行测量,当第一激光测距仪104显示的数字达到所需要的宽度时,停止第一电热丝805的横移,从而对宽度由进行定位,之后启动第一电热丝805所在的移动座6下方的第一驱动电机709,从而使得移动座6纵向移动,因此切割出所需要的宽度的材料,因此在进行切割下料工作时,只需将原料放置在承重座5的上方,之后下料只需启动第一驱动电机709、第二驱动电机17和第三驱动电机20即可,从而使得工作更加自动化,更加方便,便于下料工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1