腰部机构及机器人的制作方法
1.本实用新型涉及机器人结构领域,具体地,涉及腰部机构及机器人。
背景技术:
2.随着机器人的广泛普及,越来越多的机器人被应用到生产与生活中去,因此也对机器人的要求越来越高。在拟人机器人中,为了应对越来越高的要求,适应各种情况,对机器人的整体自由程度以及其稳定性也有了更高的要求。而机器人的腰部结构是体现自由程度的重要组成部件。
3.目前机器人的腰部结构一般能实现水平扭转运动,但很难实现俯仰、摇摆等形式的运动。本技术希望提供一种可以多自由度运动的机器人腰部结构。
4.专利文献cn110664585a公开了一种腰部控制机构及腰部康复机器人:包括支架及连接于支架的u型支架、支撑板、u型支架驱动机构,支撑板设有弧形滑轨,弧形滑轨连接弧形滑块,u型支架穿过弧形滑块、通过万向联轴器可转动连接于u型支架驱动机构,u型支架驱动机构包括可滑动连接于支架的驱动固定板、连接于驱动固定板的驱动电机,驱动电机的动力输出端连接于万向联轴器。
5.专利文献cn110154014a公开了一种躲闪机器人用腰部驱动机构,包括第一基座,第一基座内转动设置有第一驱动轴,第一基座的上方转动设置有第二基座,第二基座与第一驱动轴连接;第二基座的上方设置有第一支撑板和第一电机,第三基座的下方设置有一对平行的第一连接板,其中一个第一连接板与第一电机的输出轴连接,另一个第一连接板的侧部设置有第一端轴,第一端轴的端部转动设置在第一支撑板中;第三基座的上方设置有第二支撑板和第二电机,第二电机的正上方布置有顶板,顶板的下方设置有一对平行的第二连接板,其中一个第二连接板与第二电机的输出轴连接,另一个第二连接板的侧部设置有第二端轴,第二端轴的端部转动设置在第二支撑板中。
6.上述现有专利未能实现机器人腰部的俯仰、摇摆等形式的运动。
技术实现要素:
7.针对现有技术中的缺陷,本实用新型的目的是提供一种腰部机构及机器人。
8.根据本实用新型提供的一种腰部机构,包括:第一腰部外壳、第二腰部外壳、跨部外壳、第一腰部电机、第二腰部电机以及第三腰部电机;
9.所述第一腰部外壳转动连接所述第二腰部外壳,所述第二腰部外壳转动连接所述跨部外壳;
10.所述第一腰部外壳安装所述第一腰部电机;
11.所述第一腰部外壳安装所述第二腰部电机,所述第二腰部电机连接所述第二腰部外壳,所述第一腰部外壳通过所述第二腰部电机相对所述第二腰部外壳转动;
12.所述第二腰部外壳安装所述第三腰部电机,所述第三腰部电机连接所述跨部外壳,所述第二腰部外壳通过所述第三腰部电机相对所述跨部外壳转动。
13.优选地,所述第一腰部外壳背向所述第二腰部外壳一端安装所述第一腰部电机;
14.所述第一腰部电机外侧安装腰部旋转。
15.优选地,所述腰部旋转一端连接所述第一腰部外壳,所述腰部旋转另一端连接胸腔机构;
16.所述胸腔机构通过所述腰部旋转和所述第一腰部电机相对所述第一腰部外壳转动。
17.优选地,所述第一腰部外壳设置为u型,所述第一腰部外壳两侧垂直向一侧延伸出连接板;
18.所述连接板转动连接所述第二腰部外壳。
19.优选地,两侧所述连接板之间安装所述第二腰部电机;
20.所述第二腰部电机安装在所述第一腰部外壳和所述第二腰部外壳连接处;
21.所述第一腰部外壳、所述第二腰部外壳和所述第二腰部电机同轴心转动。
22.优选地,所述连接板上安装腰部轴承;
23.所述腰部轴承允许相对所述连接板转动;
24.所述腰部轴承和所述第二腰部电机输出端同轴心。
25.优选地,所述第二腰部外壳通过腰部转轴转动连接所述第一腰部外壳;
26.所述腰部转轴连接所述腰部轴承并和所述腰部轴承同轴心。
27.优选地,所述第二腰部外壳转动连接跨部背部连接;
28.所述跨部背部连接上安装所述第三腰部电机,所述第三腰部电机输出端连接所述第二腰部外壳;
29.所述第二腰部外壳通过所述第三腰部电机相对所述跨部背部连接转动。
30.优选地,所述跨部背部连接外侧固定安装所述跨部外壳;
31.所述跨部外壳通过所述第三腰部电机和所述跨部背部连接相对所述第二腰部外壳转动。
32.优选地,一种机器人采用所述腰部机构。
33.与现有技术相比,本实用新型具有如下的有益效果:
34.1、本设计实现腰部结构的多个自由度运动,实现机器人的俯仰、左右摇摆和前后转身等移动方式;
35.2、本装置将胸腔和腿部稳定地结合在一起。
附图说明
36.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
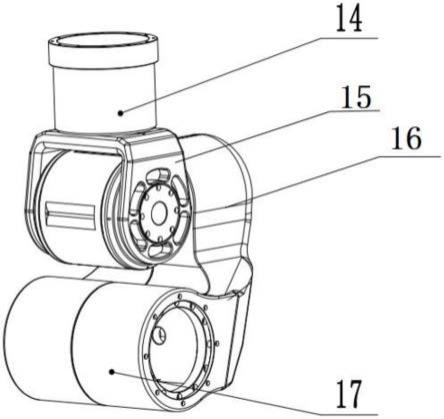
37.图1为腰部机构整体结构示意图;
38.图2为腰部机构电机传动结构示意图。
39.图中所示:
40.具体实施方式
41.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
42.实施例1
43.如图1和图2所示,一种腰部机构,可用于机器人,包括:第一腰部外壳15、第二腰部外壳16、跨部外壳17、第一腰部电机41、第二腰部电机42以及第三腰部电机161;第一腰部外壳15转动连接第二腰部外壳16,第二腰部外壳16转动连接跨部外壳17,第一腰部外壳15安装第一腰部电机41,第一腰部外壳15安装第二腰部电机42,第二腰部电机42连接第二腰部外壳16,第一腰部外壳15通过第二腰部电机42相对第二腰部外壳16转动,第二腰部外壳16安装第三腰部电机161,第三腰部电机161连接跨部外壳17,第二腰部外壳16通过第三腰部电机161相对跨部外壳17转动。第二腰部外壳16转动连接跨部背部连接43,跨部背部连接43上安装第三腰部电机161,第三腰部电机161输出端连接第二腰部外壳16,第二腰部外壳16通过第三腰部电机161相对跨部背部连接43转动。跨部背部连接43外侧固定安装跨部外壳17,跨部外壳17通过第三腰部电机161和跨部背部连接43相对第二腰部外壳16转动。
44.第一腰部外壳15设置为u型,第一腰部外壳15两侧垂直向一侧延伸出连接板,连接板转动连接第二腰部外壳16。两侧连接板之间安装第二腰部电机42,第二腰部电机42安装在第一腰部外壳15和第二腰部外壳16连接处,第一腰部外壳15、第二腰部外壳16和第二腰部电机42同轴心转动。连接板上安装腰部轴承61,腰部轴承61允许相对连接板转动,腰部轴承61和第二腰部电机42输出端同轴心。第二腰部外壳16通过腰部转轴62转动连接第一腰部外壳15,腰部转轴62连接腰部轴承61并和腰部轴承61同轴心。第一腰部外壳15背向第二腰部外壳16一端安装第一腰部电机41,第一腰部电机41外侧安装腰部旋转14。腰部旋转14一端连接第一腰部外壳15,腰部旋转14另一端连接胸腔机构,胸腔机构通过腰部旋转14和第一腰部电机41相对第一腰部外壳15转动。
45.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
46.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特
征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1