一种工业机器人操作运维平台的制作方法
1.本实用新型涉及工业机器人技术领域,尤其涉及一种工业机器人操作运维平台。
背景技术:
2.随着现代制造业和服务业的转型升级,工业机器人在测量检验、包装、分拣处理、搬运、码垛、填装、机器上下料、装配、金属切割、焊接、喷涂等领域得到了越来越多的应用。在不同领域的应用会对机器人的安装、编程、调试人员提出了不同的要求。现有用于工业机器人专业人才培养的设备,是以工业机器人系统操作为主,使用示教器、操作面板等人机交互设备及相关机械工具对工业机器人或系统进行装配、编程、调试、工艺参数更改、工装夹具更换及其他辅助作业。没有针对工业机器人系统运维员的工业机器人系统运维训练平台。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种工业机器人操作运维平台。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种工业机器人操作运维平台,包括设备安装移动工作台、网孔板和工业机器人操作运维设备电气系统,所述网孔板上安装有工业机器人操作运维设备电气系统,所述工业机器人操作运维设备电气系统包括触摸屏,且触摸屏的一侧依次设置有钥匙开关、启动按钮、停止按钮和急停;所述触摸屏的下方设置有第一空开,且第一空开的一侧依次设置有交流接触器、第一接线端子模块、熔断器、plc1和工业交换机;所述第一空开的下方设置有变频器,且变频器的一侧依次设置有视觉控制器及电源适配器、第二接线端子模块、输入信号接口和输出信号接口;所述变频器的下方设置有机器人控制器,且机器人控制器的一侧设置有接口区域;所述机器人控制器的下方设置有第二空开、接线端子和电源模块;所述第二空开的下方设置有伺服驱动器,且伺服驱动器的一侧设置有连接线缆接口区域。
6.优选的,所述输入信号接口和输出信号接口均位于第二接线端子模块的下方。
7.优选的,所述设备安装移动工作台的底部设置有多个滚轮。
8.优选的,所述滚轮上设置有刹车片。
9.优选的,所述第二空开、接线端子和电源模块从左到右依次设置。
10.本实用新型中,所述一种工业机器人操作运维平台的有益效果:依据工业机器人系统运维员、工业机器人系统操作员国家职业技能标准、以及工业机器人性能规范及其试验方法国家标准,采用模块化设计,集成开放式工业机器人本体及控制柜、柔性工作台、plc电气控制系统、工业相机系统及镜头组成的视觉系统、人机交互界面、快换工装、安全光栅及警示灯、工业机器人性能检测装置、以及工件工装,提供一套既能进行工业机器人系统运维、工业机器人性能试验的工业机器人操作运维平台,对工业机器人、工业机器人工作站或系统进行数据采集、状态监测、故障分析与诊断、维修及预防性维护与保养作业。
11.该实用新型是依据工业机器人系统运维员职业标准及工业机器人相关国家标准,同时结合为各职业学校的工业机器人、电气、自动化及相关专业,以及工业机器人职业技能培训、职业技能鉴定内容的教学、考核,为满足工业机器人系统运维员竞赛而研制。采用实际工业级六轴机器人及电器件,作为工业机器人类职业技能竞赛、培训考核设备,该装置提供工业级六机器人本体、控制器、示教器,以及配套工具、量具等,可进行工业机器人及系统运行维护技能训练考核、工业机器人性能测试训练考核。同时也是工业机器人及相关专业实训设备,提高学员工业机器人系统操作及运行维护能力;
12.本实用新型将整套设备在结构上分成柔性工作平台和控制系统平台两部分;柔性工作平台可灵活配置功能模块、调整已经配置功能模块的布置位置;控制系统平台采用开放式立体网孔板,分为上下两大部分,立体网孔板上半部分集成设备的电气控制系统,立体网孔板下半部分集成工业机器人控制系统;工业机器人控制系统平台采用开放式,将各部件挂接在立体网孔板上。
附图说明
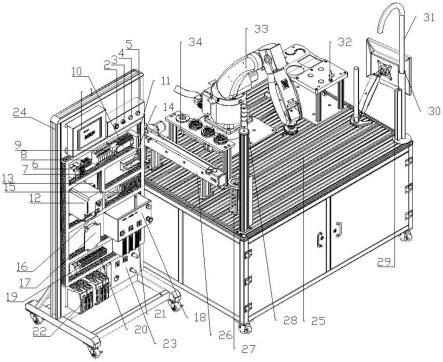
13.图1为本实用新型提出的一种工业机器人操作运维平台的前视立体结构示意图;
14.图2为本实用新型提出的一种工业机器人操作运维平台的后视立体结构示意图;
15.图3为本实用新型提出的一种工业机器人操作运维平台的主视结构示意图;
16.图4为本实用新型提出的一种工业机器人操作运维平台的侧视结构示意图;
17.图5为本实用新型提出的一种工业机器人操作运维平台的后视结构示意图。
18.图中:1触摸屏、2钥匙开关、3启动按钮、4停止按钮、5急停、6第一空开、7交流接触器、8第一接线端子模块、9熔断器、10plc1、11工业交换机、12变频器、13视觉控制器及电源适配器、14第二接线端子模块、15输入信号接口、16输出信号接口、17机器人控制器、18接口区域、19第二空开、20接线端子、21电源模块、22伺服驱动器、23连接线缆接口区域、24设备安装移动工作台、25柔性工作台、26传送带、27相机模块、28三色灯模块、29安全光栅、30工控显示屏、31监控摄像头、32立体轨迹模块、33工业机器人、34工具架快换工具。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
20.实施例一
21.参照图1-5,一种工业机器人操作运维平台,包括设备安装移动工作台24、网孔板和工业机器人操作运维设备电气系统,网孔板上安装有工业机器人操作运维设备电气系统,工业机器人操作运维设备电气系统包括触摸屏1,且触摸屏1的一侧依次设置有钥匙开关2、启动按钮3、停止按钮4和急停5;触摸屏1的下方设置有第一空开6,且第一空开6的一侧依次设置有交流接触器7、第一接线端子模块8、熔断器9、plc110和工业交换机11;第一空开6的下方设置有变频器12,且变频器12的一侧依次设置有视觉控制器及电源适配器13、第二接线端子模块14、输入信号接口15和输出信号接口16;变频器12的下方设置有机器人控制器17,且机器人控制器17的一侧设置有接口区域18;机器人控制器17的下方设置有第二空
开19、接线端子20和电源模块21;第二空开19的下方设置有伺服驱动器22,且伺服驱动器22的一侧设置有连接线缆接口区域23。
22.本实施例中,输入信号接口15和输出信号接口16均位于第二接线端子模块14的下方。
23.本实施例中,设备安装移动工作台24的底部设置有多个滚轮。
24.本实施例中,滚轮上设置有刹车片。
25.本实施例中,第二空开19、接线端子20和电源模块21从左到右依次设置。
26.实施例二
27.参照图1-5,一种工业机器人操作运维平台,包括设备安装移动工作台24、网孔板和工业机器人操作运维设备电气系统,网孔板上安装有工业机器人操作运维设备电气系统,工业机器人操作运维设备电气系统包括触摸屏1,且触摸屏1的一侧依次设置有钥匙开关2、启动按钮3、停止按钮4和急停5;触摸屏1的下方设置有第一空开6,且第一空开6的一侧依次设置有交流接触器7、第一接线端子模块8、熔断器9、plc110和工业交换机11;第一空开6的下方设置有变频器12,且变频器12的一侧依次设置有视觉控制器及电源适配器13、第二接线端子模块14、输入信号接口15和输出信号接口16;变频器12的下方设置有机器人控制器17,且机器人控制器17的一侧设置有接口区域18;机器人控制器17的下方设置有第二空开19、接线端子20和电源模块21;第二空开19的下方设置有伺服驱动器22,且伺服驱动器22的一侧设置有连接线缆接口区域23。
28.本实施例中,输入信号接口15和输出信号接口16均位于第二接线端子模块14的下方。
29.本实施例中,设备安装移动工作台24的底部设置有多个滚轮。
30.本实施例中,滚轮上设置有刹车片。
31.本实施例中,第二空开19、接线端子20和电源模块21从左到右依次设置。
32.本实施例中,还包括柔性工作台25,柔性工作台25的顶部一侧设置有三色灯模块28,且三色灯模块28的一侧依次设置有传送带26、相机模块27、工具架快换工具34、工业机器人33、立体轨迹模块32、安全光栅29、监控摄像头31和工控显示屏30。
33.本实施例中,各结构功能如下表:
34.35.[0036][0037]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1