多电极区分隔式电子皮肤、机械臂及机器人的制作方法
1.本实用新型涉及传感技术领域,特别涉及一种多电极区分隔式电子皮肤、机械臂及机器人。
背景技术:
2.随着传感技术的快速发展,电子皮肤正逐渐出现在大众视野,并应用于医疗、可穿戴设备、机器人等众多领域。
3.电子皮肤可通过附着于机器人的表面,使其拥有类似人类皮肤的感知系统,帮助其获知外界的环境信息,以作出相应的回应动作。目前,因电子皮肤只能检测其正对方向上的物体及其距离,而对物体的具体方位的检测存在较大的局限性这一问题,本技术提出一种新的能够实现单片皮肤检测物体所在具体方位的电子皮肤结构。
技术实现要素:
4.本实用新型的主要目的是提出一种多电极区分隔式电子皮肤,旨在解决目前机械臂上电子皮肤对物体的具体方位的检测存在较大的局限性的技术问题。
5.为实现上述目的,本实用新型提出一种多电极区分隔式电子皮肤,该多电极区分隔式电子皮肤包括:
6.依次层叠设置的第一保护层、电极层和第二保护层;
7.电极层包括多个电极区,各个电极区之间相互间隔,电极区能够与接近对象构成电容。
8.其中,多电极区分隔式电子皮肤还包括检测电路板,每个电极区均设有电连接点,电连接点用于连接检测电路板,检测电路板能够生成表征电容或其变化量的电信号。
9.其中,电极区包括电极本体,每个电极本体构造有凸耳状连接区且连接区远离电极本体的一端设有电连接点。
10.其中,电极本体为方形或扇形。
11.其中,电极区为两个,两个电极区上的电连接点对应位于两个电极区的相邻位置。
12.其中,电极区至少为三个,多个电极区上的电连接点位于多个电极区所构成图形的中央位置。
13.其中,多电极区分隔式电子皮肤还包括控制电路板,控制电路板与检测电路板电连接,控制电路板上设有电源模块、通讯接口和/或无线通讯模块。
14.其中,第一保护层和第二保护层的面积均大于电极层的面积,第一保护层与第二保护层贴合以形成对每个电极区的独立密封。
15.本发明还提出一种机械臂,该机械臂包括前述记载的多电极区分隔式电子皮肤,该多电极区分隔式电子皮肤包括:
16.依次层叠设置的第一保护层、电极层和第二保护层;
17.电极层包括多个电极区,各个电极区之间相互间隔,电极区能够与接近对象构成
电容。
18.本发明还提出一种机器人,该机器人包括前述记载的机械臂,该机械臂包括前述记载的多电极区分隔式电子皮肤,多电极区分隔式电子皮肤包括:
19.依次层叠设置的第一保护层、电极层和第二保护层;
20.电极层包括多个电极区,各个电极区之间相互间隔,电极区能够与接近对象构成电容。
21.与现有技术相比,本实用新型技术方案的有益效果在于:
22.当接近对象接近本多电极区分隔式电子皮肤时,电极层中对应的电极区会与接近对象构成电容,从而感知接近对象的接近;本技术通过将单片电子皮肤上的电极划分多个电极区,多个电极区对应形成为多个感应区域,通过不同的感应区域对接近物体的感测,而获得接近物体在电子皮肤检测空间中的具体方位,因此能够提高机械臂的避障精度。
附图说明
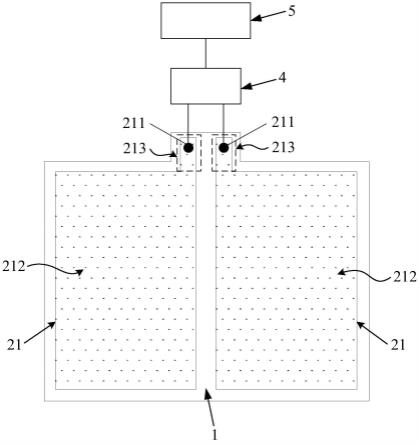
23.图1为本实用新型一实施例中多电极区分隔式电子皮肤的结构示意图;
24.图2为图1实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图;
25.图3为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图;
26.图4为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图;
27.图5为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图;
28.图6为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图;
29.图7为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图;
30.图8为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图。
具体实施方式
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的方案进行清楚完整的描述,显然,所描述的实施例仅是本实用新型中的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.本文的实施例方式整体涉及一种利用自电容感应原理(互电容感应原理亦可应用本实用新型的提供方案)与其接近或接触的物体进行接近程度感测的电子皮肤,以及其进一步的应用,例如:设置有电子皮肤的机械臂,设置有设置有电子皮肤的机械臂的机器人。在本实用新型中,电子皮肤主要用于设置于机械臂之上,作为与其接近或接触的物体的感测元件。
33.参阅图1和图2,图1为本实用新型一实施例中多电极区分隔式电子皮肤的结构示
意图,图2为图1实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图:
34.本实用新型提出一种多电极区分隔式电子皮肤,该多电极区分隔式电子皮肤包括:
35.依次层叠设置的第一保护层1、电极层2和第二保护层3;
36.电极层2包括多个电极区21,各个电极区21之间相互间隔,电极区21用于与接近对象构成电容。
37.本实施例中,第一保护层1和第二保护层3采用绝缘材料制成,比如聚酰亚胺或聚对苯二甲酸乙二醇酯形成的材料,以形成对位于二者之间的电极层2的绝缘隔离,且能够起到物理屏障的作用,避免电极受损。电极层2可以通过电沉积或气相沉积或印刷或粘贴导电片等方式形成于第一保护层1之上,即:电极层2可以在第一保护层1上通过物理或化学手段形成,也可以是预制好的导电片,设置于第一保护层1上,从而形成电极层2。电极层2可以采用铜、金等金属或非金属导电材料制成。第二保护层3可以通过粘贴等方式设置于电极层2之上。
38.电极层2包括多个电极区21,各个电极区21之间相互间隔,电极区21能够与接近对象构成电容。其中,电极层2所划分的多个电极区21在该电极层2中平铺设置,一个电极区21分别相当于电容器的一个单板,能够与检测电路连接,即多个电极区21与检测电路对应结合相当于多个电容传感器。电极层2的电极区21与检测电路结合既满足了电容器的条件,也满足了将被测量的物理量或机械量转换成电容量变化,以供检测电路通过激起lc振荡或者快速充放电等方法主动对其进行检测处理的条件。电容传感器将接近对象与电极层2的电极区21之间的距离变化转化为电容的电容量变化,通过检测电路计算电容的电容量,从而得到接近对象与电极层2的电极区21之间的距离。其中,对于电极区21的形状和数量不作限制,比如,电极区21可为正方形、长方形、扇形、三角形或其它形状,并且电极区21可以为两个或两个以上,根据实际情况设置。当接近对象接近本多电极区分隔式电子皮肤时,电极层2中对应的电极区21会与接近对象构成电容,以被检测到电容或电容量变化,从而感知接近对象的接近。
39.本技术通过将单片电子皮肤上的电极划分多个电极区21,多个电极区21对应形成为多个感应区域,通过不同的感应区域对接近物体的感测,而获得接近物体在电子皮肤检测空间中的具体方位,因此能够提高机械臂的避障精度。
40.在一些实施例中,参阅图2,多电极区分隔式电子皮肤还包括检测电路板4,每个电极区21均设有电连接点211,电连接点211用于连接检测电路板4,检测电路板4能够生成表征电容或其变化量的电信号。其中,每个电极区21的电连接点211作为导电触点,可以通过导线与检测电路板4形成电连接,或者直接与检测电路板4焊接,或者通过其它方式刚性连接,比如螺丝连接、卡扣连接等。当任一电极区21与接近对象构成电容或电容值发生变化,检测电路板4将对应生成表征电容或其变化量的电信号。
41.在一些实施例中,参阅图2,电极区21包括电极本体212,每个电极本体212构造有凸耳状连接区213且连接区213远离电极本体212的一端设有电连接点211。其中,连接区213凸出电极本体212的外缘设置,且可以位于电极本体212的外缘的任一位置处,根据实际情况设置。电连接点211位于连接区213远离电极本体212的一端,方便布线;并且,电连接点211往电极本体212以外延伸,与电极本体212相远离,不对电极本体212的检测区域造成影
响。并且,在实际设置时,可以较大程度的减小连接区213的设置面积,以防止连接区213面积过大而对电极本体212的检测区域造成干扰,提高检测效果。
42.参阅图3,图3为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图:
43.在一些实施例中,电极本体212为方形或扇形。
44.其中,当电极本体212为方形时,连接区213可以位于电极本体212四角中的任意一角,如图3所示;当电极本体212为扇形时,连接区213则可位于电极本体212的圆心角。
45.参阅图4和图5,图4为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图,图5为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图:
46.在一些实施例中,电极区21为两个,两个电极区21上的电连接点211对应位于两个电极区21的相邻位置。其中,当电极区21仅设置有两个时,电连接点211对应为两个,两个电连接点211对应位于两个电极区21的相邻位置,如图4和图5所示,即两个电极区21上的电连接点211相互靠近,方便检测电路板与两个电极区21接线布线。
47.参阅图6至图8,图6为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图,图7为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图,图8为本实用新型一实施例中多电极区分隔式电子皮肤的电极层的电极区布置示意图:
48.在一些实施例中,电极区21至少为三个,多个电极区21上的电连接点211位于多个电极区21所构成图形的中央位置。其中,当电极区21设置有三个或三个以上时,电连接点211对应为三个或三个以上。例如,图6所示的电极层21设置有三个扇形的电极区21,图7所示的电极层21设置有四个扇形的电极区21,图8所示的电极层21设置有四个方形的电极区21,多个电极区21上的电连接点211对应位于多个电极区21所构成图形的中央位置,即多个电极区21上的电连接点211相互靠近,方便检测电路板与多个电极区21接线布线。
49.在一些实施例中,参阅图2,多电极区21分隔式电子皮肤还包括控制电路板5,控制电路板5与检测电路板4电连接,控制电路板5上设有电源模块、通讯接口和/或无线通讯模块。其中,检测电路板4将其生成表征电容或其变化量的电信号传输至控制电路板5,控制电路板5能够对该电信号进行信号处理,以确定感测到接近对象的电极区21信息,进而获得接近对象的具体方位信息。作为设置选择,检测电路板4与控制电路板5可集成于一块pcb板上。控制电路板5可以通过通讯接口和/或无线通讯模块与机械臂的主控模块建立通讯连接,以将接近对象的方位信息传输至机械臂的主控模块,方便机械臂的主控模块根据所接收到接近对象的方位信息作下一步的控制策略。当然,本实施例中的控制电路板5也可直接为机械臂的主控模块的组成部分。除此以外,控制电路板5还可以通过通讯接口和/或无线通讯模块与智能终端建立通讯连接,比如,智能终端为示教器。
50.在一些实施例中,参阅图1,第一保护层1和第二保护层3的面积均大于电极层2的面积,第一保护层1与第二保护层3贴合以形成对每个电极区21的独立密封。其中,第一保护层1与第二保护层3在任意相邻两电极区21的间隔处和每一电极区21的外缘处直接贴合,实现每个电极区21独立密封,起到电极绝缘和保护电极的作用。
51.本实用新型还提出一种机械臂,该机械臂包括前述记载的多电极区分隔式电子皮
肤,该多电极区分隔式电子皮肤的具体结构参照上述实施例,由于本机械臂采用了上述所有实施例的所有技术方案,因此至少具有上述实施例的技术方案所带来的全部技术效果,在此不再一一赘述。
52.本实用新型还提出一种机器人,该机器人包括前述记载的机械臂,该机械臂的具体结构参照上述实施例,由于本机器人采用了上述所有实施例的所有技术方案,因此至少具有上述实施例的技术方案所带来的全部技术效果,在此不再一一赘述。
53.以上所述的仅为本实用新型的部分或优选实施例,无论是文字还是附图都不能因此限制本实用新型保护的范围,凡是在与本实用新型一个整体的构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1