一种洗墙灯压端盖机的制作方法
1.本实用新型一种洗墙灯压端盖机。
背景技术:
2.现有的洗墙灯在灯机体上组装将其两侧的两个灯端盖时,需要人工将灯机体抬到装配台上,再通过启动灯端盖侧压机构压装。
3.因此,当每完成一次组装时都需要人工进行抬上和抬下,操作繁琐、存在工作强度大、工作效率低的问题,同时需收集满后再借助搬运车再人工送到下工序,不能流水线地衔接上。
技术实现要素:
4.为了解决现有技术中存在的上述一个或多个缺陷问题,本实用新型提供了一种洗墙灯压端盖机。
5.为实现上述目的,本实用新型提供了一种洗墙灯压端盖机,其特征在于:包括机架,该机架上设置有灯机体输送单元、定位上压机构、定位下压机构及两个灯端盖侧压机构;该两个灯端盖侧压机构前后对称分布;该灯机体输送单元设置在该两个灯端盖侧压机构之间并用于灯机体沿左右方向水平输送;该定位上压机构和定位下压机构位于所述两个灯端盖侧压机构之间且上下分布;该定位上压机构和定位下压机构用于灯机体输送单元输送过来的灯机体定位后上下压紧。
6.采用上述方案,当灯机体输送单元将灯机体沿左右方向水平输送到两个灯端盖侧压机构所正对位置处(即压装工位处)时,再启动该定位上压机构和定位下压机构并用于灯机体输送单元输送过来的灯机体定位后上下压紧,此时该灯机体被定位并上下压紧,可将两个灯端盖分别手动或机械手自动预装在灯机体的两端上(或采用提前手动或通过机械手预装在两个灯端盖侧压机构上);再启动两个灯端盖侧压机构工作而可分别将该两个灯端盖压装在被定位压紧的灯机体上,以实现两个灯端盖压装同时压装。而当压装完成后,再启动定位上压机构和定位下压机构并分别上下松开而放行;而已压装的产品会被灯机体输送单元继续向前输送,并被自动带离压装工位处并朝向下工序输送。因此在压装过程中,不需人工进行抬上和抬下,操作更简单、省时省力、可大大提高装配效率;而当装配完成后,可实现自动松开放行并被该灯机体输送单元继续向前送到下工序,可达到流水线作业,有利于全自动化连续生产。
7.优选地,所述灯端盖侧压机构包括侧压缸和压模板;该侧压缸固定在机架上,该侧压缸输出端朝向所述灯机体输送单元并与所述压模板连接。在压装前可先将灯端盖预装的压模板上,而当定位上压机构和定位下压机构分别将灯机体输送单元输送过来的灯机体定位后上下压紧后可马上启动侧压缸工作而实现双边压装;而相比于采用先被定位上压机构和定位下压机构分别将灯机体输送单元输送过来的灯机体定位后再预装到灯机体上,本改进方案可减少一个装配周期所需的总时间,进而提升装配效率。
8.优选地,该灯机体输送单元包括两个输送带及用于驱动该两个输送带输送运动的驱动机构;该两个输送带前后间隔分布。由于该灯机体较长而采用通过两个输送带输送,可使灯机体受力平衡,输送更平稳。
9.进一步地,所述机架上固定有输送带托梁,该输送带托梁具有导向槽,且该输送带上侧的水平段装入所述导向槽内。可防止该输送带上侧的水平段在输送时受力后弯曲,保证能一直保持水平输送。
10.优选地,该驱动机构包括电机、主动轴、从动轴、两个主动带轮、两个从动带轮,该主动轴与从动轴可转动地安装在机架上,该电机与主动轴连接,该两个主动带轮套装在主动轴上,该两个从动带轮套装在该从动轴上;该两个主动带轮通过两个输送带与两个从动带轮一一连接。采用单个电机驱动该两个输送带同步工作,可保证灯机体输送时两侧部的位移同步性。
11.优选地,所述定位上压机构包括第一压缸、第一平板和第一竖板;该第一压缸输出端朝下并与第一平板连接,该第一竖板固定在第一平板上;所述定位下压机构包括第二压缸、第二平板和第二竖板;该第二压缸输出端朝上并与第二平板连接,该第二竖板固定在第二平板上。
12.进一步地,所述灯机体输送单元输出侧设置有倾斜滑架。
13.本实用新型有益效果:
14.第一、本实用新型可用于洗墙灯压端盖装配,且在压装过程中,不需人工进行对灯机体抬上和抬下,操作更简单、省时省力、可大大提高装配效率;第二、本实用新型可实现在压装完成后可实现自动松开放行并被该灯机体输送单元继续向前送到下工序,可达到流水线作业,有利于全自动化连续生产;
15.第三,本实用新型由于通过驱动机构可实现驱动两个输送带输送工作,且采用单个电机驱动该两个输送带同步工作,可保证灯机体输送时两侧部的位移同步性;
16.第四,本实用新型通过该输送带上侧的水平段装入输送带托梁的所述导向槽内,可防止该输送带上侧的水平段在输送时受力后弯曲,保证能一直保持水平地输送,可大大提升运载能力,也保证到达压装工位处时能被定位上压机构和定位下压机构精准定位和压紧,并满足大型或较重洗墙灯产品的装配输送的特殊要求。
附图说明
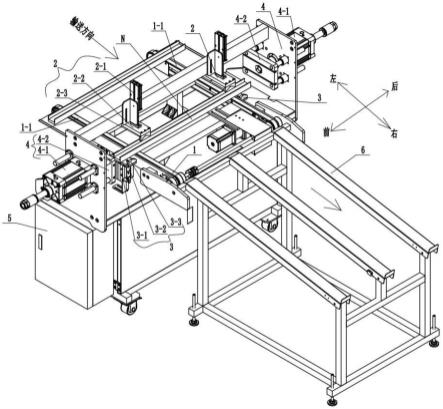
17.图1-2是本实用新型中一种洗墙灯压端盖机的立体图。
18.图3是灯机体输送单元的立体图。
19.图4是图3中a处放大图。
20.图5是输送带托梁的立体图。
具体实施方式
21.下面结合附图和实施例对本实用新型作进一步说明:
22.实施例:可参见图1-5,一种洗墙灯压端盖机,其包括机架5,该机架5上设置有灯机体输送单元1、定位上压机构2、定位下压机构3及两个灯端盖侧压机构4。
23.该两个灯端盖侧压机构4前后对称分布。
24.可见图1-2,在本实施例中,所述灯端盖侧压机构4包括侧压缸4-1和压模板4-2。该侧压缸4-1固定在机架5上,该侧压缸4-1输出端朝向所述灯机体输送单元1并与所述压模板4-2固定连接。具体地,该压模板4-2的工作面上设置有与灯端盖外形相匹配的仿形槽,在压装前,可将该灯端盖提前预装在仿形槽内。在压装前可先将灯端盖预装的压模板4-2上,而当定位上压机构2和定位下压机构3分别将灯机体输送单元1输送过来的灯机体定位后上下压紧后马上启动侧压缸4-1工作而实现双边压装;而相比于采用先定位上压机构2和定位下压机构3分别将灯机体输送单元1输送过来的灯机体定位后再预装到灯机体上,可减少一个装配周期所需的总时间,进而提升装配效率。
25.可见图1-2,该灯机体输送单元1设置在该两个灯端盖侧压机构4之间并用于灯机体沿左右方向水平输送。
26.可见图1-2,在本实施例中,该灯机体输送单元1包括两个输送带1-1及用于驱动该两个输送带1-1输送运动的驱动机构1-2;该两个输送带1-1前后间隔平行分布。由于该灯机体较长而采用通过两个输送带1-1输送,可使灯机体受力平衡,输送更平稳。
27.可见图3-5,进一步地,所述机架5上固定有输送带托梁1-3,该输送带托梁1-3具有导向槽1-31,且该输送带1-1上侧的水平段装入所述导向槽1-31内。可防止该输送带1-1上侧的水平段在输送时受力后弯曲,保证能一直保持水平输送。
28.可见图3,具体地,该输送带托梁1-3具有两个且分别设置在该两个输送带1-1上侧的水平段处。
29.可见图3-4,优选地,该驱动机构1-2包括电机1-21、主动轴1-22、从动轴1-23、两个主动带轮1-24、两个从动带轮1-25,该主动轴1-22与从动轴1-23可转动地安装在机架5上且呈左右间隔分布。
30.可见图3-4,该电机1-21与主动轴1-22连接。具体地,该电机1-21可通过传动机构(如链传动组件、齿轮传动组件、同步带组件或者减速器等)与主动轴1-22连接。
31.可见图3-4,该两个主动带轮1-24固套在主动轴1-22上且前后间隔分布,该两个从动带轮1-25固套在该从动轴1-23上且前后间隔分布;该两个主动带轮1-24通过两个输送带1-1与两个从动带轮1-25一一配合连接。而采用单个电机驱动该两个输送带1-1同步工作,可保证灯机体输送时两侧部的位移同步性。
32.可见图3-4,在工作时,该电机1-21带动主动轴1-22转动,该主动轴1-22带动该两个主动带轮1-24转动,该两个主动带轮1-24分别带动两个从动带轮1-25运动,进而实现同步工作。
33.可见图1-2,其中,该定位上压机构2和定位下压机构3位于所述两个灯端盖侧压机构4之间且上下分布;该定位上压机构2和定位下压机构3用于灯机体输送单元1输送过来的灯机体定位后上下压紧。
34.优选地,该定位上压机构2具有两个且前后分布,该定位下压机构3具有两个且前后分布。
35.可见图1-2,在本实施例中,所述定位上压机构2包括第一压缸2-1、第一平板2-2和第一竖板2-3;该第一压缸2-1输出端朝下并与第一平板2-2连接,该第一竖板2-3固定在第一平板2-2上;所述定位下压机构3包括第二压缸3-1、第二平板3-2和第二竖板3-3;该第二压缸3-1输出端朝上并与第二平板3-2连接,该第二竖板3-3固定在第二平板3-2上。
36.可见图1-2,当该灯机体输送单元1输送过来的灯机体即将到底压装工位处前,通过启动第一压缸2-1驱动该第一平板2-2和第一竖板2-3下行运动,同时该启动第二压缸3-1驱动该第二平板3-2和第二竖板3-3上行运动,先会通过该第一竖板2-3和第二竖板3-3可挡住灯机体n而阻挡定位,该灯机体n不会继续输送,而该第一平板2-2和第二平板3-2继续下行后而上下夹紧灯机体n,此时该灯机体n被定位压紧且被方位摆正。
37.作为一种工作方式:可见图1-2,当灯机体输送单元1将灯机体沿左右方向(可参见图1,本实施例中采用从左向右输送)水平输送到两个灯端盖侧压机构4所正对位置处(即压装工位处)时,启动该定位上压机构2和定位下压机构3并用于灯机体输送单元1输送过来的灯机体定位后上下压紧,此时该灯机体被定位并上下压紧,然后将两个灯端盖分别预装在被定位压紧的灯机体上,再启动两个灯端盖侧压机构4工作并分别将该两个灯端盖压装在被定位压紧的灯机体上,以实现两个灯端盖压装同时压装。而压装完成后,再启动该定位上压机构2和定位下压机构3并分别松开而放行(具体地,该第一压缸2-1驱动该第一平板2-2和第一竖板2-3上行运动;同时该第二压缸3-1驱动该第二平板3-2和第二竖板3-3下行运动),已压装的产品会被灯机体输送单元1继续向前输送,进而实现自动带离压装工位并朝向下工序输送;而下一个待压装的灯机体会在灯机体输送单元1上朝向压装工位处输送运动而自动补料。因此在整个压装过程中,不需人工进行对灯机体抬上和抬下,操作更简单、省时省力、可大大提高装配效率;另外,而当装配完成后,可实现自动松开放行并被该灯机体输送单元1继续向前送到下工序,可达到流水线作业,有利于全自动化连续生产。
38.作为二种工作方式:可见图1-2,在压装前可先将两个灯端盖分别预装的两个灯端盖侧压机构4的压模板4-2上;而当灯机体输送单元1将灯机体沿左右方向水平输送到两个灯端盖侧压机构4所正对位置处时,启动该定位上压机构2和定位下压机构3并用于灯机体输送单元1输送过来的灯机体定位后上下压紧,此时该灯机体被定位并上下压紧,再直接启动两个灯端盖侧压机构4的侧压缸4-1分别朝向灯机体两端运动;进而可将该两个灯端盖分别压装带灯机体两端上,以实现两个灯端盖压装同时压装。而压装完成后,再启动定位上压机构2和定位下压机构3并分别松开而放行,已压装的产品会被灯机体输送单元1继续向前输送,进而实现自动带离并朝向下工序输送;而下一个待压装的灯机体会在灯机体输送单元1上朝向压装工位处输送运动而自动补料。因此在压装过程中,不需人工进行对灯机体抬上和抬下,操作更简单、省时省力、可大大提高装配效率;而当装配完成后,可实现自动松开放行并被该灯机体输送单元1继续向前送到下工序,可达到流水线作业,有利于全自动化连续生产。而相比于作为一种工作方式,该作为二种工作方式,由于提前预装并能与输送定位压紧等动作可同时在进行,因此可减少一个装配周期所需的总时间,进而提升装配效率。
39.可见图1-2,进一步地,所述灯机体输送单元1输出侧设置有倾斜滑架6。已压装的产品可输送到倾斜滑架6,可被安全地滑落到较低的下工序。
40.可见图3,另外,在两个输送带1-1的两侧在压装位置处,还设置有两个导向板1-3并用于精准控制该灯机体到位时前后方向的位置。
41.另外,可在该两个灯端盖侧压机构4所正对位置处设置有感应传感器,用于检测灯机体输送单元1输送过来的灯机体的到位信号。该感应传感器与控制器连接,而控制器与灯机体输送单元1、定位上压机构2、定位下压机构3及两个灯端盖侧压机构4电路连接。
42.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人
员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1