一种四自由度机械臂控制结构
1.本实用新型涉及机械臂技术领域,尤其涉及一种四自由度机械臂控制结构。
背景技术:
2.工业机器人技术糅合了多个学科的高新技术,代表了智能机电设备的最高研究成果,是现代科术发展异常活跃的领域。上下料机器人是以工业机器人作为基础替代操作工的一种方式,它可以自动完成加工中心,数控车床等加工的工件,同时也可以完成工件的自动抓取,上料,下料装卡和工件移位翻转等工作任务。
3.目前在我国数控机床的上下料作业中,多采用人工作业的方式完成。然而机床上下料是一项强度大、重复率高、工作环境恶劣且具有一定危险性的工作,传统的人工耗时长、效率低已无法适应现代化生产的需求。而机械臂是上下料机器人最主要的执行构件之一。
4.已知材料架摆放有三种不同的物料,物料重1kg,材料架的高度高于加工台,现在需要将物料从材料架搬运加工台,并且需要按照原先的顺序排列。现有机械臂可以较为准确地抓取物料,但在对物料进行排序效率是不佳的。
技术实现要素:
5.为此,需要提供一种四自由度机械臂控制结构,解决背景技术提出的问题。
6.为实现上述目的,本技术提供一种四自由度机械臂控制结构,包括:
7.机械爪,用于抓取物料;
8.第二旋转机构,与所述机械爪相连接,所述第二旋转机构用于带动机械爪以第一轴线为转轴作圆周运动;
9.移动机构,与所述第二旋转机构相连接,所述移动机构用于驱动机械爪在位移平面上横向移动以及纵向移动;
10.第一旋转机构,包括机架与第一旋转动力装置,所述第一旋转动力装置与所述机架相连接,所述第一旋转动力装置与所述移动机构相连接以驱动所述移动机构以第二轴线为转轴作圆周运动,所述第一轴线垂直于所述第二轴线,所述第一轴线与所述第二轴线均平行于所述位移平面。
11.进一步地,所述移动机构包括第一旋转件、第一移动动力装置、第一固定座、第二旋转件、第二移动动力装置、第二固定座、第三固定座、第四固定座、移动座与同步带;
12.所述第一旋转件与所述第一移动动力装置分别设置在所述第一固定座上,所述第一旋转件与所述第一移动动力装置相连接,所述第一移动动力装置用于驱动第一旋转件作圆周运动,所述第二旋转件与所述第二移动动力装置分别设置在所述第二固定座上,所述第二旋转件与所述第二移动动力装置相连接,所述第二移动动力装置用于驱动第二旋转件作圆周运动,所述第一固定座与所述第二固定座之间通过第一滑杆相固定;
13.所述第三固定座与所述第四固定座之间通过第二滑杆相固定,所述第一滑杆与所
述第二滑杆呈十字形,所述移动座可滑动地设置在所述第一滑杆与所述第二滑杆上;
14.所述第三固定座上设置第一限位件,所述同步带绕过所述第一旋转件、所述第二旋转件与所述第一限位件,且所述同步带的两端均设置在所述第四固定座上;
15.所述第三固定座或者所述第四固定座与所述第二旋转机构相连接;
16.所述第一固定座或者所述第二固定座与所述第一旋转动力装置相连接。
17.进一步地,所述移动机构还包括第二限位件、第三限位件、第四限位件与第五限位件;
18.所述第二限位件、所述第三限位件、所述第四限位件与所述第五限位件分别设置在所述移动座上,所述同步带绕过所述第一旋转件、所述第二旋转件、所述第一限位件、所述第二限位件、所述第三限位件、所述第四限位件与所述第五限位件。
19.进一步地,所述第一限位件的结构和/或所述第二限位件的结构和/或所述第三限位件的结构和/或所述第四限位件的结构和/或所述第五限位件的结构相同于所述第一旋转件的结构。
20.进一步地,所述第一旋转件包括滑轮。
21.进一步地,所述移动座通过第一直线轴承设置在所述第一滑杆上,所述移动座通过第二直线轴承设置在所述第二滑杆上。
22.进一步地,所述第一旋转动力装置包括连接轴、第一电机、第一齿轮与第二齿轮;
23.所述机架上设置所述第一电机,所述第一电机的输出轴上套设所述第一齿轮,所述第一齿轮与所述第二齿轮相啮合,所述第二齿轮套设在连接轴上,所述连接轴可转动地设置在所述机架上,所述移动机构设置在所述连接轴上,所述连接轴平行于所述第二轴线。
24.进一步地,所述第一齿轮为小齿轮,所述第二齿轮为大齿轮。
25.进一步地,所述第一旋转机构还包括轴承座;
26.所述轴承座设置在所述机架上,所述轴承座的轴承套设在所述连接轴上。
27.进一步地,所述第二旋转机构为舵机。
28.区别于现有技术,上述技术方案中,第一旋转机构立于地面上并支撑着移动机构、第二旋转机构与机械爪,在第一旋转机构驱动移动机构转动时,移动机构上的第二旋转机构与机械爪一并以第二轴线为轴作圆周运动;移动机构驱动第二旋转机构与机械爪在位移平面上横向移动以及纵向移动;第二旋转机构可以驱动机械爪以第一轴线为转轴作圆周运动;四自由度机械臂控制结构具有两个旋转轴与两个垂直方向的线性扩展,机械爪的运动范围是一个空心圆柱,有比较直观的空间定位,具有较高的输送效率。
附图说明
29.图1为本技术中四自由度机械臂控制结构的立体图;
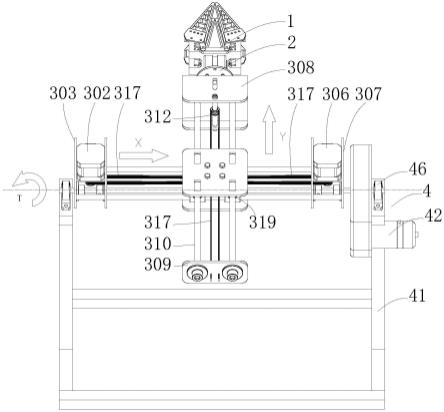
30.图2为本技术中四自由度机械臂控制结构的俯视图;
31.图3为本技术中四自由度机械臂控制结构的侧视图;
32.图4为本技术中移动机构的结构示意图;
33.图5为本技术中平移机构的原理图之一;
34.图6为本技术中平移机构的原理图之二;
35.图7为本技术中平移机构的原理图之三;
36.图8为本技术中平移机构的原理图之四;
37.图9为本技术中第一旋转机构的结构示意图。
38.附图标记说明:
39.1、机械爪,
40.2、第二旋转机构;
41.3、移动机构;
42.301、第一旋转件;302、第一移动动力装置;303、第一固定座;
43.304、第一滑杆;305、第二旋转件;306、第二移动动力装置;
44.307、第二固定座;308、第三固定座;309、第四固定座;
45.310、第二滑杆;311、移动座;312、第一限位件;313、第二限位件;
46.314、第三限位件;315、第四限位件;316、第五限位件;
47.317、同步带;318、第一直线轴承;319、第二直线轴承;
48.4、第一旋转机构;
49.41、机架;42、第一旋转动力装置;421、第一电机;43、连接轴;
50.44、第一齿轮;45、第二齿轮;46、轴承座。
具体实施方式
51.为详细说明本技术可能的应用场景,技术原理,可实施的具体方案,能实现目的与效果等,以下结合所列举的具体实施例并配合附图详予说明。本文所记载的实施例仅用于更加清楚地说明本技术的技术方案,因此只作为示例,而不能以此来限制本技术的保护范围。
52.请参阅图1至图9,本技术提供一种四自由度机械臂控制结构,包括:
53.机械爪1,用于抓取物料;
54.第二旋转机构2,与所述机械爪1相连接,所述第二旋转机构2用于带动机械爪1以第一轴线(如图1的t所示,以及如图2上呈左右走向的虚线所示)为转轴作圆周运动;
55.移动机构3,与所述第二旋转机构2相连接,所述移动机构3用于驱动机械爪1在位移平面上横向移动以及纵向移动;
56.第一旋转机构4,包括机架41与第一旋转动力装置42,所述第一旋转动力装置42与所述机架41相连接,所述第一旋转动力装置42与所述移动机构 3相连接以驱动所述移动机构3上以第二轴线(如图2上自上下走向的虚线所示)为转轴作圆周运动,所述第一轴线垂直于所述第二轴线,所述第一轴线与所述第二轴线均平行于所述位移平面,第一轴线与第二轴线二者并不是一直处于同一平面上。
57.上述技术方案中,第一旋转机构立于地面上并支撑着移动机构、第二旋转机构与机械爪,在第一旋转机构驱动移动机构转动时,移动机构上的第二旋转机构与机械爪一并以第二轴线为轴作圆周运动;移动机构驱动第二旋转机构与机械爪在位移平面上横向移动以及纵向移动;第二旋转机构可以驱动机械爪以第一轴线为转轴作圆周运动;四自由度机械臂控制结构具有两个旋转轴与两个垂直方向的线性扩展,机械爪的运动范围是一个空心圆柱,有比较直观的空间定位,具有较高的输送效率。
58.请参阅图1至图4,作为本技术的一种实施方式,所述移动机构3包括第一旋转件
301、第一移动动力装置302、第一固定座303、第二旋转件305、第二移动动力装置306、第二固定座307、第三固定座308、第四固定座309 与移动座311。
59.所述第一旋转件301与所述第一移动动力装置302分别设置在所述第一固定座303上,第一固定座303用于支撑第一旋转件301与第一移动动力装置302。所述第一旋转件301与所述第一移动动力装置302相连接,所述第一移动动力装置302用于驱动第一旋转件301以第三轴线为轴作圆周运动。所述第一移动动力装置302包括第三电机,例如步进电机,可选用42bygh250c 型号步进电机,步进电机是根据其控制器所给的脉冲数大小来精确控制输出轴的转动角度,可以较好地计算出机械爪1的位移量。在某些实施例中,所述第一移动动力装置302也可以采用内燃机,内燃机是一种动力机械,它是通过使燃料在机器内部燃烧,并将其放出的热能直接转换为动力的热力发动机。
60.所述第二旋转件305与所述第二移动动力装置306分别设置在所述第二固定座307上,第二固定座307用于支撑第二旋转件305与第二移动动力装置306。所述第二旋转件305与所述第二移动动力装置306相连接,所述第二移动动力装置306用于驱动第二旋转件305以第四轴线为轴作圆周运动。其中,第三轴线平行于第四轴线,且二者位于同一平面上。值得一提的是,第二移动动力装置306采用电机或者内燃机来驱动第二旋转件305转动,进而驱动同步带317转动。
61.所述第一固定座303与所述第二固定座307之间通过第一滑杆304相固定,第一滑杆304为直杆,第一滑杆304上滑动设置有移动座311,第一滑杆 304作为导向的作用,移动座311用于沿着第一滑杆304移动。需要说明的是,移动座311上设置可容纳第一滑杆304的第一空腔,第一滑杆304置于第一空腔中,第一滑杆304的外壁与第一空腔的内壁滑动连接;可以对第一滑杆 304的外壁与第一空腔的内壁进行光滑处理,减小二者之间的摩擦力。
62.所述第三固定座308与所述第四固定座309之间通过第二滑杆310相固定,所述第一滑杆304与所述第二滑杆310呈十字形,所述移动座311可滑动地设置在所述第一滑杆304与所述第二滑杆310上。第二滑杆310为直杆,第二滑杆310上滑动设置有移动座311,第二滑杆310作为导向的作用,移动座311用于沿着第二滑杆310移动。另外,第一滑杆304与第二滑杆310二者不接触,可保证移动座311既能沿着第一滑杆304移动,又能沿着第一滑杆304移动。需要说明的是,移动座311上设置可容纳第二滑杆310的第二空腔,第二滑杆310置于第二空腔中,第二滑杆310的外壁与第二空腔的内壁滑动连接;可以对第二滑杆310的外壁与第二空腔的内壁进行光滑处理,减小二者之间的摩擦力。
63.所述第三固定座308上设置第一限位件312。所述同步带317绕过所述第一旋转件301、所述第二旋转件305与所述第一限位件312,且所述同步带317 的两端均设置在所述第四固定座309上。同步带317绕过第一转动件、第二转动件与第一限位件312后并固定于第四固定座309上后,可以形成五边形的形状。同步带317具有一定的弹性,能够在外力的作用下伸长一部分,以适应不同的状态。
64.所述第三固定座308或者所述第四固定座309与所述第二旋转机构2相连接,即:机械爪1通过第二旋转机构2与第三固定座308相连接,如图1 所示;或者机械爪1通过第二旋转机构2与第四固定座309相连接。
65.所述第一固定座303或者所述第二固定座307与所述第一旋转动力装置 42相连接,即:第一旋转动力装置42与所述第一固定座303相连接,用于驱动第一固定座303以第二
轴线为转轴作圆周运动;或者第一旋转动力装置42 与所述第二固定座307相连接,用于驱动第二固定座307以第二轴线为转轴作圆周运动。
66.第一移动动力装置302经第一旋转件301将动力传导至同步带317上,第二移动动力装置306经第二旋转件305将动力传导至同步带317上,进而驱动机械爪1在位移平面上横向移动以及纵向移动。以图5至图8的视图为例,x为位移平面上的横向方向,y为位移平面上的纵向方向;情况一:第一旋转件301在第一移动动力装置302的驱动下顺时针转动,第二旋转件305 在第二移动动力装置306的驱动下逆时针转动,第四固定座309在位移平面上朝着第一限位件312的方向进行纵向移动,结构如图5所示;情况二:第一旋转件301在第一移动动力装置302的驱动下逆时针转动,第二旋转件305 在第二移动动力装置306的驱动下顺时针转动,第三固定座308上的第一限位件312在位移平面上朝着第四固定座309的方向进行纵向移动,结构如图6 所示;情况三:第一旋转件301在第一移动动力装置302的驱动下逆时针转动,第二旋转件305在第二移动动力装置306的驱动下逆时针转动,第三固定座308上的第一限位件312与第四固定座309在位移平面上朝着第一旋转件301的方向进行横向移动,结构如图7所示;情况四:第一旋转件301在第一移动动力装置302的驱动下顺时针转动,第二旋转件305在第二移动动力装置306的驱动下顺时针转动,第三固定座308上的第一限位件312与第四固定座309在位移平面上朝着第二旋转件305的方向进行横向移动,结构如图8所示。
67.如此,移动机构3可驱动机械爪1在位移平面上横向移动以及纵向移动,另外,机械臂控制结构具有较佳的稳定性。
68.请参阅图4,作为本技术的一种优选实施方式,所述移动机构3还包括第二限位件313、第三限位件314、第四限位件315与第五限位件316。所述第二限位件313、所述第三限位件314、所述第四限位件315与所述第五限位件316分别设置在所述移动座311上,且第二限位件313、第三限位件314、第四限位件315与第五限位件316位于同一平面上。所述同步带317绕过所述第一旋转件301、所述第二旋转件305、所述第一限位件312、所述第二限位件313、所述第三限位件314、所述第四限位件315与所述第五限位件316,且所述同步带317的两端均设置在所述第四固定座309上。同步带317绕过第一转动件、第二转动件、第一限位件312、第二限位件313、第三限位件314、第四限位件315与第五限位件316后并固定于第四固定座309上后,可以形成类似四角星的形状。若是将第二限位件313、第三限位件314、第四限位件 315与第五限位件316四者布置成矩形的形状,第一旋转件301与第二旋转件 305处于同一直线,可以让同步带317形成类似十字形的形状,结构如图1与图2所示。
69.在本技术中,第一旋转件301包括轴承或者滑轮,以第一旋转件301包括滑轮为例,滑轮通过转轴设置于第一固定座303上,同步带317绕过滑轮的部分外壁,使得同步带317在第一移动动力装置302或者第二移动动力装置306的驱动下转动时地更加顺畅。
70.请参阅图4,作为本技术的一种实施方式,所述第一限位件312的结构和 /或所述第二限位件313的结构和/或所述第三限位件314的结构和/或所述第四限位件315的结构和/或所述第五限位件316的结构相同于所述第一旋转件 301的结构,可以更好地引导同步带317的传动。具体的,第一限位件312包括轴承或者滑轮,和/或第二限位件313包括轴承或者滑轮,和/或第三限位件314包括轴承或者滑轮,和/或第四限位件315包括轴承或者滑轮,和/或第五限位件316包括轴承或者滑轮;以第一限位件312包括滑轮为例,滑轮通过转轴设
置于第三固定座308上,同步带317绕过滑轮的部分外壁,使得同步带317在第一移动动力装置302或者第二移动动力装置306的驱动下转动时地更加顺畅。
71.请参阅图5至图8,优选的,第一旋转件301、第二旋转件305、第一限位件312、第二限位件313、第三限位件314、第四限位件315与第五限位件 316均为直径相同的滑轮,位于第一旋转件301与第二限位件313之间的同步带317轮与位于第二旋转件305与第三限位件314之间的同步带317轮处于同一直线上,位于第一旋转件301与第四限位件315之间的同步带317轮与位于第二旋转件305与第五限位件316之间的同步带317轮处于同一直线上,位于第一限位件312与第二限位件313之间的同步带317轮与位于第四固定座309与第四限位件315之间的同步带317轮处于同一直线上,位于第一限位件312与第三限位件314之间的同步带317轮与位于第四固定座309与第五限位件316之间的同步带317轮处于同一直线上。
72.请参阅图1、图3与图4,作为本技术的一种实施方式,为了更好地让移动座311在第一滑杆304或者第二滑杆310上滑动,所述移动机构3还包括第一直线轴承318与第二直线轴承319。直线轴承是一种以低成本生产的直线运动系统,用于无限行程与圆柱轴配合使用。所述移动座311通过第一直线轴承318设置在所述第一滑杆304上,即第一直线轴承318的外壁套设在第一空腔的内壁上,第一直线轴承318的内壁套设在第一滑杆304的外壁上,在第一直线轴承318的作用下,移动座311可沿着第一滑杆304顺畅地移动,并能获得灵敏度高、精度高的平稳直线运动。
73.以及,所述移动座311通过第二直线轴承319设置在所述第二滑杆310 上,即第二直线轴承319的外壁套设在第二空腔的内壁上,第二直线轴承319 的内壁套设在第二滑杆310的外壁上,在第二直线轴承319的作用下,移动座311可沿着第二滑杆310顺畅地移动,并能获得灵敏度高、精度高的平稳直线运动。
74.值得一提的是,第一滑杆304可以有多根,第二滑杆310可以有多根,可以提供较好的稳定性。
75.优选的,移动机构3需要具备一定的负载能力,在机械爪1抓取物料的情况下,移动机构3可能出现一定的形变,导致连接部位出现脱落等情形,造成严重后果。所以第一滑杆304与第二滑杆310的材料选用45号钢,强度较高,塑性和韧性较好。
76.作为本技术的一种实施方式,所述移动机构3包括横向伸缩装置与纵向伸缩装置,横向伸缩装置与纵向伸缩装置相连接,横向伸缩装置与纵向伸缩装置中的一个与所述第一旋转机构4相连接,横向伸缩装置与纵向伸缩装置中的另一个与第二旋转机构2相连接。例如,横向伸缩装置与第一旋转机构4 相连接,机械爪1通过第二旋转机构2与纵向伸缩装置相连接;或者纵向伸缩装置与第一旋转机构4相连接,机械爪1通过第二旋转机构2与横向伸缩装置相连接。其中,横向伸缩装置包括气缸、油缸或者电动伸缩杆,纵向伸缩装置包括气缸、油缸或者电动伸缩杆。另外,可以通过导向槽来引导横向伸缩装置或者纵向伸缩装置的伸缩动作,进而提升横向伸缩装置或者纵向伸缩装置的伸缩动作的准确性。
77.请参阅图9,作为本技术的一种实施方式,所述第一旋转动力装置42包括连接轴43、第一电机421、第一齿轮44与第二齿轮45。所述机架41上设置所述第一电机421,所述第一电机421的输出轴上套设所述第一齿轮44。所述第一齿轮44与所述第二齿轮45相啮合,所述第二齿轮45套设在连接轴 43上。所述连接轴43可转动地设置在所述机架41上。所述移动机构3设置在所述连接轴43上,所述连接轴43平行于所述第二轴线。在第二旋转机构2 的作
用下,机械爪1的运动轨迹是一条相对平滑的曲线,比之普通机械臂分步进行转动动作和横移动作的运动轨迹,效率更高。在其他一些实施例中,第一电机421的输出轴直接与连接轴43传动连接即可,无需第一齿轮44与第二齿轮45。在某些实施例中,第一电机421可以用内燃机来替代。
78.请参阅图9,优选的,所述第一齿轮44为小齿轮,所述第二齿轮45为大齿轮。齿轮(大齿轮与小齿轮)的压力角为20
°
,齿轮的材料可选用45号钢,齿轮按7级精度设计。小齿轮调制处理,大齿轮正火处理。小齿轮的齿数取 33,小齿轮的齿宽取18.2mm,大齿轮的齿数取106,大齿轮的齿宽取13.2mm。另外,同步带317选用带宽为6的3m带。
79.请参阅图1、图2与图3,作为本技术的一种实施方式,机架41具有两个支腿,分别为第一支腿与第二支腿,第一支腿与第二支腿之间通过一个底部框架相固定。底部框型的形状可以为矩形、圆形等。连接轴43的一端端部可转动地设置在机架41的第一支腿上,第二齿轮45套设在连接轴43的另一端上,为了增加连接轴43的稳定性,并降低连接轴43的一端与机架41的连接处的负载,连接轴43的另一端端部可转动地设置在机架41的第二支腿上。
80.请参阅图1、图2与图3,作为本技术的一种实施方式,所述第一旋转机构4还包括轴承座46。所述轴承座46设置在所述机架41上,所述轴承座46 的轴承套设在所述连接轴43上,轴承座46上设置有轴承,轴承套设在连接轴43的外壁上,让连接轴43更加顺畅地转动。具体的,第一支腿上设置一个轴承座46,连接轴43的一端端部套设在第一支腿上轴承座46的轴承上。另外,第二支腿上也可以设置一个轴承座46,连接轴43的另一端端部套设在第二支腿上轴承座46的轴承上。
81.优选的,机架41是支撑起整个机械臂的重要零部件,其整体可由铝管拼接而成。机械臂在工作时,机架41保持不动,支撑各装置的运行,防止变形与错位。机架41材质选择6061铝合金,该材料较为容易加工,并且焊接性较好,有较高的力学性能,不容易被腐蚀且韧性良好。
82.优选的,第一电机421选用3508电机,并使用c620电子调速器控制第一电机。c620电子调速器有两种靠控制电机方式,这里我们采用can通信,这种方式c620电子调速器会定期上传电机的电流、速度、位置等信息。根据这一特点,可采用以角度环为外环,速度环为内环的串级pid算法来精确控制电机转动的角度。角度环采用pi控制可以无静差跟踪阶跃信号,速度环采用pd控制,具有响应很快而且提高稳定裕度的优点。
83.作为本技术的一种实施方式,所述第二旋转机构2包括第二电机,例如步进电机,步进电机是根据其控制器所给的脉冲数大小来精确控制输出轴的转动角度,可以较好地计算出机械爪1的旋转量。第二电机放置在电机固定座上,电机固定座放置在移动机构3的第三固定座308上,第二电机的输出轴与所述机械爪1相连接,第二电机的输出轴用于带动机械爪1以第一轴线为转轴作圆周运动,第一轴线位于第二电机的输出轴的中心处,结构如图1 与图2所示。优选的,所述第二旋转机构2为舵机,可让机械爪1实现360
°
转动。
84.请参阅图1与图2,作为本技术的一种实施方式,机械爪1可分为以卡盘为代表的内撑式机械爪和以连杆式机械爪为代表的外抓式机械爪,对物料进行抓取,到达指定位置后并放开物料。
85.请参阅图1,本技术的四自由度机械臂控制结构以t,x,y这三个参数构成坐标系,x是在水位移平面上水平方向的位移,y是机械臂的径向长度,t 是移动机构3绕连接轴43的
角位移。四自由度机械臂控制结构在抓取物料后,同时进行t轴转动和x轴横移两个动作将物料搬运到正确位置的运动轨迹,这个运动轨迹是一条相对平滑的曲线,比之普通机械臂分步进行转动动作和横移动作的运动轨迹,效率更高。
86.另外,四自由度机械臂控制结构在抓取物料后,同时进行t轴转动动作, x轴横移动作和y轴收缩动作,运行到一半时,y轴收缩动作停止,改为y 轴伸长动作,直至将物料搬运到正确位置的运动轨迹,该轨迹位移量更小,但机械臂动作更为复杂,所需的算力更多。
87.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中各个位置出现的“实施例”一词并不一定指代相同的实施例,亦不特别限定其与其它实施例之间的独立性或关联性。原则上,在本技术中,只要不存在技术矛盾或冲突,各实施例中所提到的各项技术特征均可以以任意方式进行组合,以形成相应的可实施的技术方案。
88.除非另有定义,本文所使用的技术术语的含义与本技术所属技术领域的技术人员通常理解的含义相同;本文中对相关术语的使用只是为了描述具体的实施例,而不是旨在限制本技术。
89.在本技术的描述中,用语“和/或”是一种用于描述对象之间逻辑关系的表述,表示可以存在三种关系,例如a和/或b,表示:存在a,存在b,以及同时存在a和b这三种情况。另外,本文中字符“/”一般表示前后关联对象是一种“或”的逻辑关系。
90.在本技术中,诸如“第一”和“第二”之类的用语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何实际的数量、主次或顺序等关系。
91.在没有更多限制的情况下,在本技术中,语句中所使用的“包括”、“包含”、“具有”或者其他类似的表述,意在涵盖非排他性的包含,这些表述并不排除在包括所述要素的过程、方法或者产品中还可以存在另外的要素,从而使得包括一系列要素的过程、方法或者产品中不仅可以包括那些限定的要素,而且还可以包括没有明确列出的其他要素,或者还包括为这种过程、方法或者产品所固有的要素。
92.与《审查指南》中的理解相同,在本技术中,“大于”、“小于”、“超过”等表述理解为不包括本数;“以上”、“以下”、“以内”等表述理解为包括本数。此外,在本技术实施例的描述中“多个”的含义是两个以上(包括两个),与之类似的与“多”相关的表述亦做此类理解,例如“多组”、“多次”等,除非另有明确具体的限定。
93.在本技术实施例的描述中,所使用的与空间相关的表述,诸如“中心”“纵向”“横向”“长度”“宽度”“厚度”“上”“下”“前”“后”“左”“右”“竖直”“水平”“垂直”“顶”“底”“内”“外”“顺时针”“逆时针”“轴向”“径向”“周向”等,所指示的方位或位置关系是基于具体实施例或附图所示的方位或位置关系,仅是为了便于描述本技术的具体实施例或便于读者理解,而不是指示或暗示所指的装置或部件必须具有特定的位置、特定的方位、或以特定的方位构造或操作,因此不能理解为对本技术实施例的限制。
94.除非另有明确的规定或限定,在本技术实施例的描述中,所使用的“安装”“相连”“连接”“固定”“设置”等用语应做广义理解。例如,所述“连接”可以是固定连接,也可以是可拆卸连接,或成一体设置;其可以是机械连接,也可以是电连接,也可以是通信连接;其可以是直接相连,也可以通过中间媒介间接相连;其可以是两个元件内部的连通或两个元件的
相互作用关系。对于本技术所属技术领域的技术人员而言,可以根据具体情况理解上述用语在本技术实施例中的具体含义。
95.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本实用新型的专利保护范围。因此,基于本实用新型的创新理念,对本文所述实施例进行的变更和修改,或利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本实用新型专利的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1