一种机器人拉线标定设备的保护装置的制作方法
1.本实用新型涉及机器人测试装备技术领域,具体为一种机器人拉线标定设备的保护装置。
背景技术:
2.机器人在使用前通常需要进行精度标定,其中有对机器人减速比、杆件尺寸和安装误差进行标定和补偿,以达到使用场景的绝对定位精度要求。而在精度标定的过程中,使用最多的便是拉线标定设备。实际使用时,拉线标定往往会由于使用者操作不当或者机器人出现故障导致轨迹规划偏差等原因,导致拉线标定设备与机器人连接的测量线被拉出过多甚至拉断的现象。
3.因此本领域技术人员亟需一种无需人为干预、判断准确且保护迅速的拉线标定设备保护装置。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,提供一种机器人拉线标定设备的保护装置,以解决利用拉线标定设备调试机器人的过程中出现测量线拉出异常以及拉线标定设备损坏的情况。
5.本实用新型提供了一种机器人拉线标定设备的保护装置,该保护装置包括:通讯模块、控制模块以及io模块,其中,所述通讯模块电连接拉线标定设备,用于传递所述拉线标定设备的数据;所述控制模块电连接所述通讯模块,用于处理所述拉线标定设备的数据以及发送控制信号;所述io模块电连接所述控制模块,用于接收控制信号以及控制机器人急停。
6.本实用新型的实施方式中,所述控制模块能够在线长和/或线长变化速度超过阈值时向所述io模块发送急停信号。
7.进一步的,所述io模块电连接所述机器人的控制器的急停端口,所述io模块能够在接收到急停信号时控制所述机器人急停。
8.本实用新型的实施方式中,所述通讯模块电连接所述拉线标定设备的控制器,用于将所述拉线标定设备的线长变化数据实时传递给所述控制模块。
9.根据上述实施方式可知,本实用新型提供的一种机器人拉线标定设备的保护装置具有以下益处:该保护装置的保护过程无需人为干涉,方便人员操作,且检测准确率高,保护反应迅速,有效降低了工作人员在进行机器人调试和机器人本身轨迹规划故障导致的拉线标定损坏的。
10.应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本实用新型所欲主张的范围。
附图说明
11.下面的附图是本实用新型的说明书的一部分,其绘示了本实用新型的示例实施例,所附附图与说明书的描述一起用来说明本实用新型的原理。
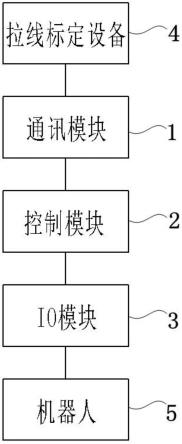
12.图1为本实用新型提供的一种机器人拉线标定设备的保护装置的连接示意图。
13.图2为本实用新型提供的一种机器人拉线标定设备的保护装置的流程图。
14.附图标记说明:
15.1-通讯模块、2-控制模块、3-io模块、4-拉线标定设备、5-机器人。
具体实施方式
16.现详细说明本实用新型的多种示例性实施方式,该详细说明不应认为是对本实用新型的限制,而应理解为是对本实用新型的某些方面、特性和实施方案的更详细的描述。
17.在不背离本实用新型的范围或精神的情况下,可对本实用新型说明书的具体实施方式做多种改进和变化,这对本领域技术人员而言是显而易见的。由本实用新型的说明书得到的其他实施方式对技术人员而言是显而易见的。本申请说明书和实施例仅是示例性的。
18.本实用新型提供了一种机器人拉线标定设备的保护装置,如图1所示为该保护装置的电连接示意图。本实用新型的具体实施方式中,该保护装置包括:通讯模块1、控制模块2以及io模块3。其中,通讯模块1电连接拉线标定设备4,用于传递拉线标定设备4的数据。拉线标定设备4在使用过程中,其控制器会产生拉线数据,通讯模块1读取该数据,并将该数据传递给与通讯模块1电连接的控制模块2。控制模块2用于处理拉线标定设备4的数据以及发送控制信号。io模块3电连接控制模块2,io模块3用于接收控制信号以及控制机器人5急停,防止机器人继续拉出拉线标定设备4里的测量线,保护拉线标定设备。
19.本实用新型的具体实施方式中,控制模块2能够在线长和/或线长变化速度超过阈值时向io模块3发送急停信号。其中,当控制模块2判断线长超过设定值时,控制模块2会给io模块3发送急停控制信号,使得io模块3控制机器人急停。
20.当控制模块2判断线长变化的速度超过设定值时,控制模块2会给io模块3发送急停控制信号,使得io模块3控制机器人急停。
21.当控制模块2判断线长超过设定值以及线长变化的速度超过设定值时,控制模块2会给io模块3发送急停控制信号,使得io模块3控制机器人急停。
22.进一步的,io模块3电连接机器人5的控制器的急停端口,io模块3能够在接收到急停信号时控制机器人5急停。
23.本实用新型的具体实施方式中,通讯模块1电连接拉线标定设备4的控制器,用于将拉线标定设备4的线长变化数据实时传递给控制模块2。
24.如图2所示,该保护装置在使用时其保护的流程为:
25.步骤s1:协议模块读取并传递拉线标定设备的数据给控制模块。这个过程中,通讯模块将拉线标定设备的线长变化数据实时传递给控制模块。
26.步骤s2:控制模块根据数据计算线长以及线长变化速度。具体的,控制模块将接收到的拉线标定设备的数据进行计算分析,得到实时的线长数据以及线长变化速度的数据。
27.步骤s3:线长和/或线长变化速度是否超过阈值。具体的,控制模块根据设定的阈
值,判断线长和/或线长变化速度是否超过阈值,进而判断是否需要对拉线标定设备进行保护。
28.当线长以及线长变化速度均正常时,该保护装置继续重复进行步骤s1。
29.当线长超过对应的阈值时或线长变化速度超过对应阈值时或线长和线长变化速度均超过对应的阈值时,保护装置进行下一步。
30.步骤s4:控制模块向io模块发送急停信号。具体的,当控制模块判断线长和/或线长变化速度异常时,会向io模块发送急停控制信号,使其进行急停控制。
31.步骤s5:io模块控制机器人急停。具体的,io模块3电连接机器人的控制器的急停端口,当io模块接收到控制模块的急停控制信号时,io模块会触发机器人急停,防止机器人继续拉出拉线标定设备里的测量线,保护拉线标定设备。
32.以上所述仅为本实用新型示意性的具体实施方式,在不脱离本实用新型的构思和原则的前提下,任何本领域的技术人员所做出的等同变化与修改,均应属于本实用新型保护的范围。
技术特征:
1.一种机器人拉线标定设备的保护装置,其特征在于,该保护装置包括:通讯模块(1)、控制模块(2)以及io模块(3),其中,所述通讯模块(1)电连接拉线标定设备(4),用于传递所述拉线标定设备(4)的数据;所述控制模块(2)电连接所述通讯模块(1),用于处理所述拉线标定设备(4)的数据以及发送控制信号;所述io模块(3)电连接所述控制模块(2),用于接收控制信号以及控制机器人(5)急停。2.根据权利要求1所述的机器人拉线标定设备的保护装置,其特征在于,所述控制模块(2)能够在线长和/或线长变化速度超过阈值时向所述io模块(3)发送急停信号。3.根据权利要求2所述的机器人拉线标定设备的保护装置,其特征在于,所述io模块(3)电连接所述机器人(5)的控制器的急停端口,所述io模块(3)能够在接收到急停信号时控制所述机器人(5)急停。4.根据权利要求1所述的机器人拉线标定设备的保护装置,其特征在于,所述通讯模块(1)电连接所述拉线标定设备(4)的控制器,用于将所述拉线标定设备(4)的线长变化数据实时传递给所述控制模块(2)。
技术总结
本实用新型提供一种机器人拉线标定设备的保护装置,该保护装置包括:通讯模块、控制模块以及IO模块,其中,通讯模块电连接拉线标定设备,用于传递拉线标定设备的数据。控制模块电连接通讯模块,用于处理拉线标定设备的数据以及发送控制信号。IO模块电连接控制模块,用于接收控制信号以及控制机器人急停。该保护装置检测准确率高,保护反应迅速,对拉线标定设备进行保护过程中无需人为干涉,有效避免了拉线标定设备的损坏。线标定设备的损坏。线标定设备的损坏。
技术研发人员:杨跞 许楠 陈宏伟 王天网
受保护的技术使用者:中科新松有限公司
技术研发日:2022.04.02
技术公布日:2022/12/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1