一种抓手可更换的机械手的制作方法
1.本实用新型涉及机械手技术领域,具体是一种抓手可更换的机械手。
背景技术:
2.机械手能按固定程序进行抓取、搬运物件等操作。可实现生产的机械化和自动化,能广泛应用于工业生产,通常会根据生产的要求在机械手的末端安装对应的抓手,通常会设置多种与机械手配合的抓手,以实现相应的夹持或加工操作。
3.现有专利公告号为cn213499245u公开的一种方便更换机械爪的机械手中,当机械手的大小和型号各不相同时,能通过横板将卡槽上的卡杆进行拆卸,使其将横板下的机械手架整个拆卸下来,安装其他机械手架时,机械手架通过卡杆卡入其中,方便机械爪的更换。
4.上述机械手中的机械爪能进行更换,但更换安装时,通过卡杆卡接固定,稳定性需进一步加强,以便于后续进行稳定的生产操作,且上述机械手的设置,不利于线缆连接机械爪,需要进行改进。针对以上问题,提出一种抓手可更换的机械手。
技术实现要素:
5.本实用新型的目的在于提供一种抓手可更换的机械手,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种抓手可更换的机械手,包括底座、安装在底座上的第一机械臂和安装在第一机械臂远离底座一端的第二机械臂;
8.所述第二机械臂远离第一机械臂一端通过安装架连接抓手安装板,所述抓手安装板上安装有抓手;
9.所述安装架包括与第二机械臂固定连接的固定板,所述固定板远离第二机械臂一侧通过若干个衔接杆连接定位板,所述定位板上设有t型槽,所述抓手安装板上设有与t型槽对应的t型条,所述定位板上还设有用于进一步固定抓手安装板位置的紧固件;
10.所述第一机械臂和第二机械臂上均连接有导线套,所述固定板上设有穿线孔,两组穿线孔相远离一侧均设有开口,所述固定板上连接有用于将开口封闭的限位件。
11.优选的,所述紧固件包括设置在定位板上的若干个条形孔,所述抓手安装板上设有与定位板对应的螺栓孔。
12.优选的,所述限位件包括封杆,所述穿线孔靠近开口的两侧内壁均设有用于封杆滑动的矩形槽,一组矩形槽与调节槽连通,所述封杆靠近调节槽一端顶部连接拨块,所述封杆远离拨块一端的顶部和顶部均连接有橡胶凸起。
13.优选的,所述t型槽两端与外部连通,用于t型条的滑动置入。
14.优选的,所述导线套上设有线孔,所述导线套通过螺栓固定在第一机械臂或第二机械臂上。
15.优选的,所述底座底部外壁连接固定环,所述固定环上设有若干个与螺栓对应的固定孔。
16.优选的,所述底座上设有用于安装第一机械臂的转动座,所述第一机械臂顶部转动连接第二机械臂,所述转动座和第一机械臂顶部一侧均安装有旋转电机。
17.与现有技术相比,本实用新型的有益效果是:
18.本实用新型中安装架能对抓手进行安装固定,抓手上可设置与定位板对应的抓手安装板进行使用,安装时,能先通过t型条与t型槽的配合定位,之后再通过紧固件进一步固定,使抓手能稳定安装固定,利于后续进行生产操作;
19.本实用新型中导线套和固定板上穿线孔的设置,利于对线缆进行导向固定,减少线缆杂乱,方便线缆连接抓手或第二机械臂末端。
附图说明
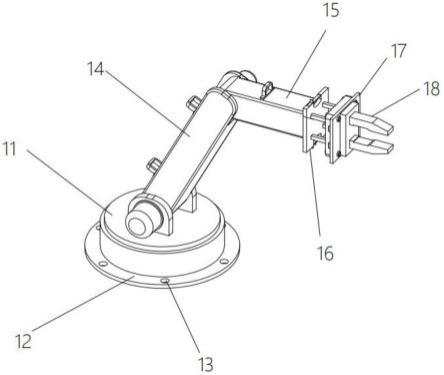
20.图1为本实用新型的结构示意图。
21.图2为本实用新型中导线套的结构示意图。
22.图3为本实用新型中安装架的结构示意图。
23.图中:11、底座;12、固定环;13、固定孔;14、第一机械臂;15、第二机械臂;16、安装架;17、抓手安装板;18、抓手;19、t型条;20、导线套;21、固定板;22、衔接杆;23、定位板;24、t型槽;25、条形孔;26、穿线孔;27、封杆;28、拨块;29、调节槽。
具体实施方式
24.请参阅图1-图3,本实用新型实施例中,一种抓手可更换的机械手,包括底座11、安装在底座11上的第一机械臂14和安装在第一机械臂14远离底座11一端的第二机械臂15;
25.所述底座11上设有用于安装第一机械臂14的转动座,所述第一机械臂14顶部转动连接第二机械臂15,所述转动座和第一机械臂14顶部一侧均安装有旋转电机;
26.底座11、第一机械臂14和第二机械臂15的配合设置,可选用现有的结构,第一机械臂14能绕转动座转动,第二机械臂15能绕第一机械臂14顶部转动;
27.所述第二机械臂15远离第一机械臂14一端通过安装架16连接抓手安装板17,所述抓手安装板17上安装有抓手18;
28.所述安装架16包括与第二机械臂15固定连接的固定板21,所述固定板21远离第二机械臂15一侧通过若干个衔接杆22连接定位板23,所述定位板23上设有t型槽24,所述抓手安装板17上设有与t型槽24对应的t型条19,所述定位板23上还设有用于进一步固定抓手安装板17位置的紧固件;所述t型槽24两端与外部连通,用于t型条19的滑动置入;
29.安装时,能先通过t型条19与t型槽24的配合定位,之后再通过紧固件进一步固定,使抓手18能稳定安装固定,利于后续进行生产操作。
30.所述第一机械臂14和第二机械臂15上均连接有导线套20,所述固定板21上设有穿线孔26,两组穿线孔26相远离一侧均设有开口,所述固定板21上连接有用于将开口封闭的限位件;所述导线套20上设有线孔,所述导线套20通过螺栓固定在第一机械臂14或第二机械臂15上;导线套20和固定板21上穿线孔26的设置,利于对线缆进行导向固定,减少线缆杂乱,方便线缆连接抓手或第二机械臂15末端。
31.所述紧固件包括设置在定位板23上的若干个条形孔25,所述抓手安装板17上设有与定位板23对应的螺栓孔;实际操作时,将t型条19对接在t型槽24内,能对抓手安装板17初步固定,之后使用与螺栓孔配合的螺栓,能将抓手安装板17稳定固定在定位板23上。
32.所述限位件包括封杆27,所述穿线孔26靠近开口的两侧内壁均设有用于封杆27滑动的矩形槽,一组矩形槽与调节槽29连通,所述封杆27靠近调节槽29一端顶部连接拨块28,所述封杆27远离拨块28一端的顶部和顶部均连接有橡胶凸起;
33.通过拨块28能拉动封杆27移动,方便从开口置入线路,之后封杆27设置有橡胶凸起的一端置入对应的矩形槽,能封闭开口,防止线缆的偏移;导线套20上由于没有设置开口,线缆预先从导线套20内部的线孔穿过进行固定,后续安装抓手18时也不需要进行调节导线套20上的线缆;而线缆连接抓手18后,再次安装抓手,穿线孔26上的开口便于线缆的置入。
34.所述底座11底部外壁连接固定环12,所述固定环12上设有若干个与螺栓对应的固定孔13;方便使用与固定孔13对应的螺栓将固定环12固定在目标位置,从而固定机械手的位置。
35.本实用新型使用时,将机械手固定在目标位置,抓手18安装时,能先通过t型条19与t型槽24的配合定位,之后使用与螺栓孔配合的螺栓,能将抓手安装板17稳定固定在定位板23上,导线套20和固定板21上穿线孔26的设置,利于对线缆进行导向固定,减少线缆杂乱,方便线缆连接抓手或第二机械臂15末端。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1