一种桥面智能巡检机器人的制作方法
1.本实用新型涉及桥梁检测技术领域。更具体地说,本实用新型涉及一种桥面智能巡检机器人。
背景技术:
2.桥梁作为交通网中的重要组成部分,使用期间的安全可靠就变得尤为重要,桥梁养护人员的任务之巨可想而知,根据规定对ⅰ、ⅱ级桥梁的日常巡查每天不得少于一次,巡检工作具有繁琐、重复、单调的特点,存在对人员能力、工作状态依耐性强,容易出现错检、漏检的问题。
3.随着科技不断发展,人工智能、5g、北斗与卫星互联网技术的不断成熟,机器代替人完成工作劳动成为发展的必然趋势。机器人是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围,桥面智能巡检机器人是用于对桥面或在桥梁检修道上进行巡视检查的机器设备,但目前的智能巡检机器人仅在检测、定位功能上做了扩展或改进,以提高检测精度,当下雨或者阳光过于强烈时,缺乏有效的防护措施,使得机器人的环境适应性和使用寿命有所降低。
技术实现要素:
4.本实用新型的目的是提供一种桥面智能巡检机器人,以解决现有技术中的自动巡检设备针对天气影响缺乏防护措施的技术问题。
5.为了实现根据本实用新型的这些目的和其它优点,提供了一种桥面智能巡检机器人,包括:
6.机器人本体,其底部设置有行走机构,机器人本体内设有工控机以及与工控机电连接的无线通信模块、电源模块,行走机构与工控机电连接;
7.云台,其连接在机器人本体的顶部,云台在水平方向的两端分别可转动连接有可见光高清摄像机和红外热成像仪,可见光高清摄像机和红外热成像仪以及云台分别与工控机电连接,云台的顶面中部向下开设有安装孔;
8.防护组件,其包括竖向设置的撑杆,撑杆的下端伸入至安装孔内且与安装孔之间可拆卸固定连接,撑杆的外侧壁上沿轴向设置有骨架杆,骨架杆在撑杆的外周等间隔且对称分布设置,骨架杆的下端与撑杆之间铰接且骨架杆能旋转至水平方向,相邻的骨架杆之间连接有防水布且在骨架杆方向水平时平铺在相邻的骨架杆之间,撑杆的顶部中心处向下开设有安装槽,安装槽内设置有伸缩组件,伸缩组件沿竖向伸缩且顶部连接有限位帽,限位帽的开口方向向下,伸缩组件向上伸出的长度大于限位帽的内侧深度且限位帽的内侧深度大于防水布距离骨架杆顶部的竖向长度,撑杆的半径加上骨架杆在径向的长度之和略小于限位帽的半径。
9.优选的是,所述伸缩组件为顶推油缸,顶推油缸的缸体固定在安装槽内,顶推油缸
的伸缩端向上设置且连接所述限位帽,顶推油缸与所述工控机电连接。
10.优选的是,所述云台的外形呈上端为水平部、下端为竖直部的t形结构,所述可见光高清摄像机和所述红外热成像仪分别连接在水平部的两端,所述安装孔设置在水平部的中心位置,竖直部的下端连接在所述机器人本体的顶部。
11.优选的是,所述机器人本体上还设置有分别与所述工控机电连接的超声波传感器、激光雷达传感器。
12.优选的是,所述骨架杆的顶端设置为朝向轴心处且向下倾斜的尖端结构。
13.本实用新型至少包括以下有益效果:本实用新型的桥面智能巡检机器人包括机器人本体、云台、防护组件,在机器人本体及云台上安装有可见光高清摄像机、红外热成像仪、工控机、无线通信模块、电源模块、行走机构,可对桥面进行自动巡检,并将检测数据通过无线通信模块传出,通过设置的防护组件,针对不太适合巡检的天气围绕撑杆下放骨架杆,骨架杆之间的防水布铺开,对机器人本体及安装的部件进行遮阳或挡雨,提高本装置在不同环境下的适用性,之后通过限位帽对骨架杆、防水布进行限位,方便收纳。
14.本实用新型的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本实用新型的研究和实践而为本领域的技术人员所理解。
附图说明
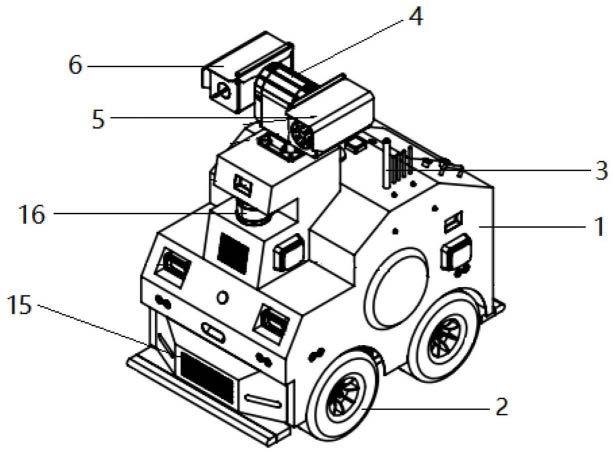
15.图1为机器人本体的结构示意图;
16.图2为防护组件在收纳时的主视结构图;
17.图3为防护组件在限位帽伸出时的主视结构图;
18.图4为防护组件的骨架杆、防水布在收纳时的俯视结构图;
19.图5为防护组件在骨架杆、防水布撑开时的主视结构图;
20.图6为防护组件的骨架杆、防水布在撑开时的俯视结构图。
21.说明书附图标记说明:1、机器人本体,2、行走机构,3、无线通信模块,4、云台,5、可见光高清摄像机,6、红外热成像仪,7、安装孔,8、撑杆,9、骨架杆,10、防水布,11、伸缩组件,12、限位帽,13、水平部,14、竖直部,15、超声波传感器,16、激光雷达传感器,17、尖端结构。
具体实施方式
22.下面结合附图对本实用新型做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
23.在本实用新型的描述中,术语“横向”、“纵向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.如图1-6所示,本实用新型的一种桥面智能巡检机器人,包括:
25.机器人本体1,其底部设置有行走机构2,机器人本体1内设有工控机以及与工控机电连接的无线通信模块3、电源模块,行走机构2与工控机电连接;
26.云台4,其连接在机器人本体1的顶部,云台4在水平方向的两端分别可转动连接有可见光高清摄像机5和红外热成像仪6,可见光高清摄像机5和红外热成像仪6以及云台4分
别与工控机电连接,云台4的顶面中部向下开设有安装孔7;
27.防护组件,其包括竖向设置的撑杆8,撑杆8的下端伸入至安装孔7内且与安装孔7之间可拆卸固定连接,撑杆8的外侧壁上沿轴向设置有骨架杆9,骨架杆9在撑杆8的外周等间隔且对称分布设置,骨架杆9的下端与撑杆8之间铰接且骨架杆9能旋转至水平方向,相邻的骨架杆9之间连接有防水布10且在骨架杆9方向水平时平铺在相邻的骨架杆9之间,撑杆8的顶部中心处向下开设有安装槽,安装槽内设置有伸缩组件11,伸缩组件11沿竖向伸缩且顶部连接有限位帽12,限位帽12的开口方向向下,伸缩组件11向上伸出的长度大于限位帽12的内侧深度且限位帽12的内侧深度大于防水布10距离骨架杆9顶部的竖向长度,撑杆8的半径加上骨架杆9在径向的长度之和略小于限位帽12的半径。
28.在一般无雨天气下,所有骨架杆9位于竖直状态且紧贴撑杆8,相邻的骨架杆9之间的防水布10折叠起来,类似伞的原理,相邻的骨架杆9之间留出足够的空间供防水布10折叠,折叠后通过限位帽12进行临时限位固定,骨架杆9及防水布10的顶端位于限位帽12内,防止骨架杆9散开,通过机器人本体1顶部设置的云台4、可见光高清摄像机5以及红外热成像仪6,云台4可带动可见光高清摄像机5以及红外热成像仪6在水平面内旋转,通过机器人本体1底部设置的行走机构2带动机器人本体1移动,对桥梁路面的设施进行可见光巡检,通过工控机对行走机构2、云台4的运动进行控制,自主完成巡检任务,行走机构2可为常见的行走轮、驱动电机等结构,并通过无线通信模块3将数据和画面实时传回通信连接的终端,便于后台工作人员进行分析,了解现场情况,机器人可在无人的情况下,可在白天、黑夜以及各种恶劣环境下清晰成像,实现24小时不间断无人值守巡检,在减少人工的同时,大大提升运维的内容和频率,提高了设备巡视效率,改变了传统运维方式,实现运维智能化,为运营商提供及时、可靠的设备信息,有效改善了人工错检、漏检等问题,工控机、无线通信模块3、电源模块、可见光高清摄像机5和红外热成像仪6均属于现有技术成熟产品,其功能的实现在此不再赘述,另外,针对特殊的天气情况,如在露天下阳光过于强烈或下雨时,可手动操作或控制与伸缩组件11连接的电控设备,使伸缩组件11带动限位帽12向上移动,限位帽12离开防水布10和骨架杆9,此时骨架杆9在与撑杆8的铰接作用下转动到水平位置,铰接可设置的便于骨架杆9自由转动,同时,骨架杆9之间的防水布10铺开,实现挡雨或遮阳,避免淋湿机器人本体1及安装的相应模块、部件等或过强的阳光影响可见光高清摄像机5的拍摄、加速设备老化,相邻的骨架杆9之间的防水布10的尺寸在生产时就确保能在骨架杆9水平时平铺开,当然防水布10也可设置为具有防紫外线的遮阳伞类似的材质,提高对阳光的遮挡效率,机器人巡检完成后,再手动使骨架杆9朝撑杆8移动,对骨架杆9和防水布10进行收纳,移动限位帽12将骨架杆9、防水布10卡在限位帽12内侧即可。
29.在另一种技术方案中,如图3、图5所示,所述伸缩组件11为顶推油缸,顶推油缸的缸体固定在安装槽内,顶推油缸的伸缩端向上设置且连接所述限位帽12,顶推油缸与所述工控机电连接。
30.通过设置顶推油缸,可通过工控机操作顶推油缸的伸缩,提高对骨架杆9、防水布10限位的稳定性,当驱动顶推油缸的伸缩端向上伸长至限位帽12完全离开骨架杆9及防水布10时,骨架杆9和防水布10即可铺开对机器人本体1从上方进行遮阳挡雨,收纳骨架杆9和防水布10时,再向下收缩伸缩端直至将骨架杆9和防水布10的上端限位在限位帽12的内侧。
31.在另一种技术方案中,如图2、图3、图5所示,所述云台4的外形呈上端为水平部13、
下端为竖直部14的t形结构,所述可见光高清摄像机5和所述红外热成像仪6分别连接在水平部13的两端,所述安装孔7设置在水平部13的中心位置,竖直部14的下端连接在所述机器人本体1的顶部。
32.云台4位于机器人本体1的顶部,在云台4的顶部中心处设置安装孔7,撑杆8可与安装孔7螺纹连接,便于安装和拆卸,甚至可通过安装孔7及在云台4位于安装孔7以下的部分打孔走线,可见光高清摄像机5和红外热成像仪6分别位于云台4的顶部两端,避免相互影响视角范围。
33.在另一种技术方案中,如图1所示,所述机器人本体1上还设置有分别与所述工控机电连接的超声波传感器15、激光雷达传感器16。
34.通过设置激光雷达传感器16、超声波传感器15进行精准的障碍物识别,实现机器人巡检的动态避障和安全行驶功能。
35.在另一种技术方案中,如图图2、图3、图5所示,所述骨架杆9的顶端设置为朝向轴心处且向下倾斜的尖端结构17。通过将骨架杆9的顶端设置为尖端,当骨架杆9位于水平方向后,利于对骨架杆9和防水布10表面的水流进行引流。
36.尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本实用新型的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的附图。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1