一种下棋机器人
1.本实用新型涉及机器人技术领域,尤其是指一种下棋机器人。
背景技术:
2.近年来,机器人技术和人工智能发展迅速,服务机器人逐渐进入人们的日常生活,同时我国人口老龄化问题日趋严重,人们对老年人服务机器人的需求在不断增加。对于服务机器人来说,方便、自然、快捷的人机交互方式是智能化的重要体现,而语音交互是其中的一种主要交互方式。
3.语音交互即通过语言的沟通让机器能像人类一样听懂对方传达的信息,是计算机对语音信号进行处理和分析,然后将其转换成相应的文本和命令,通过机器执行和表达,从而实现用户与机器之间的信息交换的过程。
4.语音交互在声控设备上的研究最早开始于20世纪50年代,随后便经历了从功能机阶段到智能机器阶段的跨越,许多语音交互的应用开始出现在大众的视野,在智能家居、医疗、门禁系统、轨道交通、救援、身份识别等领域有着广泛的应用,随着技术的发展,语音交互还将在更多领域服务于人类。
5.现有的下棋机器人,方案多采用机器视觉方式,使用者需要通过触屏的方式控制机器人的落子位置,而对于老年人和残障人士来说,这样的下棋机器人仍存在不便,因此,如何提供一种能够语音控制下棋的机器人是目前待解决的问题。
技术实现要素:
6.为此,本实用新型所要解决的技术问题在于克服现有技术中触屏控制落子位置对老年人和残障人士不便的问题。
7.为解决上述技术问题,本实用新型提供了一种下棋机器人,包括:
8.机器人本体,置于棋盘工作台桌面上,包括以转动关节连接的底座、机械大臂、机械小臂和末端执行器;
9.机器人控制器,置于所述底座内部,与所述机器人本体电连接;
10.主控板,置于所述棋盘工作台桌面上,与所述机器人控制器通信连接;
11.语音识别模块,与所述主控板通信连接,包括唤醒指令识别单元和执行指令识别单元,且为非特定人语音识别芯片;
12.语音采集模块,与所述语音识别模块电连接。
13.在本实用新型的一个实施例中,所述非特定人语音识别芯片为ld3320芯片。
14.在本实用新型的一个实施例中,所述机器人本体为dobot机械臂。
15.在本实用新型的一个实施例中,所述末端执行器下连接一吸盘,所述吸盘通过软管与气泵盒连接,所述气泵盒与所述机器人控制器电连接。
16.在本实用新型的一个实施例中,所述主控板为stm32控制器。
17.在本实用新型的一个实施例中,所述stm32控制器为stm32f103zet6芯片。
18.在本实用新型的一个实施例中,所述机器人本体上设有示教存点按键,与所述机器人控制器电连接。
19.在本实用新型的一个实施例中,所述下棋机器人还包括:
20.wifi模块,与所述主控板连接。
21.在本实用新型的一个实施例中,所述主控板与所述语音识别模块间采用spi通信。
22.在本实用新型的一个实施例中,所述主控板与所述机器人控制器间采用串口通信。
23.本实用新型的上述技术方案相比现有技术具有以下优点:
24.本实用新型所述的下棋机器人,提供语音识别模块对语音采集模块采集到的语音信号进行处理,送入主控板中进一步处理并与模板库进行匹配,根据识别结果选取运动路径输出运动指令发送至机器人控制器,从而驱动机械臂及末端执行器完成相应的下棋动作;其中,语音识别模块采用非特定人识别技术,可面向大多数人,其泛化能力更好,识别准确率更高,并且下棋机器人上电开机后,语音识别模块需先进行唤醒后,再去识别具体的下棋执行指令,提升了下棋机器人的抗干扰性。本实用新型将语音控制机器人和棋盘游戏相结合,让行动不便的老人以及残疾人士通过语音便可进行下棋游戏,也可以作为一种陪伴老人和孩童的娱乐教育功能拓展。
附图说明
25.为了使本实用新型的内容更容易被清楚的理解,下面根据本实用新型的具体实施例并结合附图,对本实用新型作进一步详细的说明,其中
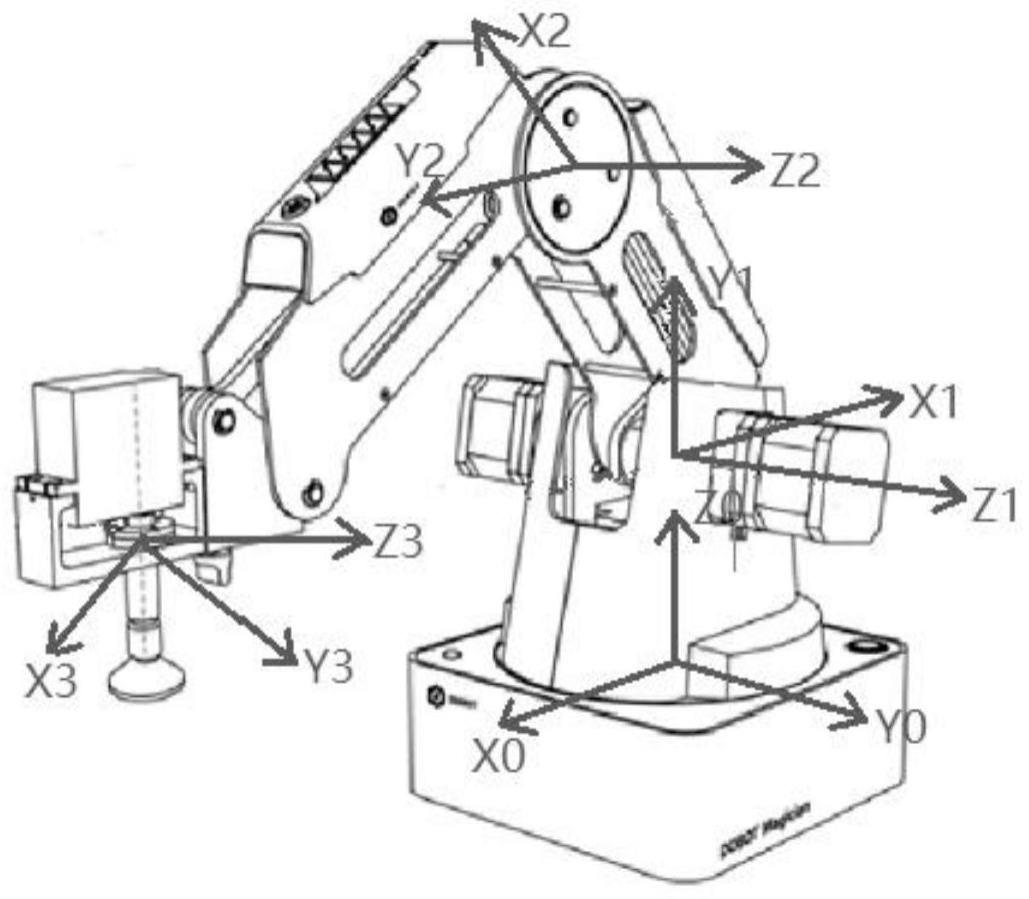
26.图1是本实用新型所提供的机器人本体;
27.图2是本实用新型所提供的下棋机器人原理示意图;
28.图3是本实用新型所提供的下棋机器人示意图。
具体实施方式
29.本实用新型的核心是提供一种可以语音交互的下棋机器人,让行动不便的老人以及残疾人士通过语音便可进行下棋游戏。
30.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
31.本实用新型所提供的下棋机器人,包括:
32.如图1,机器人本体,为dobot机械臂,置于棋盘工作台桌面上,包括以转动关节连接的底座、机械大臂、机械小臂和末端执行器;
33.dobot机械臂采用四自由度串联机械臂,共有四个运动关节,采用四台步进电机控制,且有着两个角度传感器,动作精度可达0.2mm,可以保证棋子精确下落,非常适合于下棋的场景;由于并未使用到第四个转动关节,所以只对3个关节做运动学建模。建立各关节的x,y,z轴。z轴和驱动轴同向。x轴针对z轴平行,z轴垂直两种情况分别确定其方向。基坐标的x轴取机械臂向正前方运动的方向。机械臂的运动范围:底座在-90
°
~90
°
,大臂运动范围0
°
~85
°
,小臂运动范围-10
°
~90
°
;
34.本实用新型末端执行器连接吸盘,能够牢牢的吸住棋子,其通过软管与气泵盒连
接,所述气泵盒与所述机器人控制器电连接,通过气泵工作以完成下棋动作。
35.机器人控制器,置于所述底座内部,与所述机器人本体电连接;
36.主控板,置于所述棋盘工作台桌面上,与所述机器人控制器通信连接;
37.语音识别模块,与所述主控板通信连接,包括唤醒指令识别单元和执行指令识别单元,且为非特定人语音识别芯片;
38.本实用新型的语音识别模块采用ld3320芯片,ld3320是一款基于前述非特定人语音识别(si-asr)技术的专用芯片,采用了hmm算法,集成了语音处理和其他的外部电路,包括a/d、d/a转换电路等,不需要外接flash和ram,ld3320在工作时,无需进行事先的训练和录音,其内部集成了预先建立好的语音模型库和识别算法,可自主的完成语音的处理和识别功能,语音识别准确率能够达到95%。在使用中,列表采用汉语拼音的形式,通过编辑识别关键词列表达到识别不同词条的效果,例如识别方言、英语等;
39.语音采集模块,为麦克风,与所述语音识别模块电连接。
40.表1给出了该下棋系统所用到的部分语音指令,语音信号在主控板中被转为数字代码,以便于处理。
41.表1语音指令表(部分)
42.你好小杰点一到点五点六到点七小杰再见点二到点三前进一格点一到点二点三到点四后退一格点一到点三点四到点五向右一格点一到点四点五到点六向左一格
43.本实用新型所述的下棋机器人,使用过程中,语音识别芯片将信号拾取后进行处理,将识别结果送入主控板中进一步处理并与模型库进行匹配,并根据识别结果选取运动路径,根据该路径输出对dobot机械臂和末端执行器的驱动指令以完成下棋操作。
44.如图2所示,基于以上实施例,本实施例对该下棋机器人进行进一步详细说明:
45.所述非特定人语音识别芯片还可以为ld332x芯片;
46.所述主控板为stm32控制器,为stm32f103zet6芯片;
47.所述机器人本体上设有示教存点按键,与所述机器人控制器电连接,通过按键控制机器人本体进行示教来获取坐标点的位置,并将其以列表的形式写入程序以完成标定。在使用时,使用者只需说出对应棋子的数字代号,便可以实现棋子的移动。
48.所述下棋机器人还包括wifi模块,与所述主控板连接,手机可连接该wifi模块发出的热点,作为显示屏用,可触屏控制落子位置。
49.本实用新型所述的下棋机器人,提供语音识别模块对语音采集模块采集到的语音信号进行处理,送入主控板中进一步处理并与模板库进行匹配,根据识别结果选取运动路径输出运动指令发送至机器人控制器,从而驱动机械臂及末端执行器完成相应的下棋动作;其中,语音识别模块采用非特定人识别技术,可面向大多数人,其泛化能力更好,识别准确率更高,并且下棋机器人上电开机后,语音识别模块需先进行唤醒后,再去识别具体的下棋执行指令,提升了下棋机器人的抗干扰性。本实用新型将语音控制机器人和棋盘游戏相结合,让行动不便的老人以及残疾人士通过语音便可进行下棋游戏,也可以作为一种陪伴老人和孩童的娱乐教育功能拓展。
50.基于以上实施例,本实施例对该下棋机器人进行进一步详细说明:
51.语音识别模块与stm32之间有串口通信与spi通信两种通信模式,本实用新型采用spi通信方式控制该芯片;
52.主控板与dobot机械臂采用的通信方式为串口通信。将dobot底座i/o接口复用为uart通信的rx和tx功能,与stm32的uart4_tx和uart4_rx相接,实现串口通信。通信参数中波特率设置为115200bps。因物理层每次发送和接受的数据是8位原始数据,而此研究每次发送的数据远大于8位,所以dobot制定了通信协议来保证数据传输的开始、结束和校验数据的准确性。因此,stm32主控板每次都是发送一串包含包头、负载帧长、负载帧和数据校验的数据包,来控制dobot机械臂。本实用新型中采用循环队列的方式实现一次发送一个超过8位原始数据的数据包给dobot。每当队列发送了一个8位数据,自动打开串口发送中断,继续发送下一个,直至队列中的数据全部发送出去,保证串口的发送中断不被打开。
53.本实用新型所搭建的下棋机器人如图3所示,为了测试该语音控制系统的语音识别准确率,对上述下棋机器人进行了实验验证,分别在实验室的安静环境中和人为嘈杂环境中对16个坐标点进行了反复测试,测试指令包含三种不同人声共32条指令。表2给出了下棋机器人部分语音信号分别在安静和嘈杂环境中的识别准确率。
54.表2下棋机器人语音信号识别准确率(部分)(%)
55.语音指令人声1(安静/嘈杂)人声1(安静/嘈杂)人声1(安静/嘈杂)你好小杰93.4%/86.2%92.5%/85.8%93.1%/85.2%小杰再见92.1%/84.5%91.8%/85.2%92.2%/85.9%点一到点二91.6%/85.7%92.7%/84.3%92.3%/85.2%点二到点三92.3%/85.6%92.1%/86.1%91.8%/85.5%前进一格94.5%/83.8%93.3%/84.7%93.9%/84.3%向右一格92.6%/85.1%92.3%/85.3%91.9%/85.6%
56.根据测试结果,在相对安静的环境中识别率可达92%以上,而在相对嘈杂的环境中,识别率可达到85%,满足了语音控制机器人下棋的现实要求。
57.本实用新型设计开发了一款基于语音控制的下棋机器人。由非特定人语音识别芯片、stm32主控板、控制器及dobot机械臂组成,采用语音交互的方式控制机器人下棋。经测试实验,本下棋机器人能保证语音识别的准确率,能实现五子棋的下棋要求。为老人及残障人士的娱乐提供了一种新的方式,同时也为娱乐和教育提供了参考与借鉴。
58.在下五子棋的基础上,该系统可拓展用于跳棋、围棋等活动。将该系统与图形处理模块结合,对象棋棋子进行识别,可实现象棋的博弈等。
59.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1