多功能智能巡检机器人的制作方法
本技术涉及一种多功能智能巡检机器人,属于继电保护、测控装置、开关柜设备巡检领域。
背景技术:
1、发电厂厂用电设备需要进行日常巡视检查、定期检查、专项检查等周期性工作,由于厂用电设备布置地点较为分散,存在相对主厂房距离较远的设备,如补给水泵房、辅助厂房、光伏控制室等,这些地方往往巡检频次较低,一旦发生设备缺陷,有可能会长时间“带病”运行,最终导致故障范围扩大,不利于机组的安全稳定运行。
2、传统的做法是使用增加班组人员数量,对该区域加强巡检频次,这样做可以达到尽早发现缺陷或者隐患,但是存在两方面的问题:第一,检修维护人员频繁的驱车前往偏远设备区域,有可能存在造成交通事故的潜在隐患;第二,需配备更多的巡检人员,增加了企业人力资源成本投入;第三,工作效率低, 浪费了宝贵的工作时间。
3、为了提高工作效率,减轻检修维护人员工作负担。电网以及发电企业已经有巡检机器人的应用,可实现自主无人巡检、环境检测、红外检测、局部放电检测等功能,可基本满足设备巡检工作的需要,其缺点是该类机器人研制的定位是巡检和操作,没有一定的现场安全管控功能。
技术实现思路
1、本实用新型要解决的技术问题是提供一种多功能智能巡检机器人,具备设备的自主巡检、安全行为审视、人机交互以及环境监测、红外监测等功能,并且能够防止检修人员误操作以及走错设备间隔,避免引起电力安全生产事故的发生。
2、为了解决上述技术问题,本实用新型所提供的技术方案是:一种多功能智能巡检机器人,包括机器人本体,所述机器人本体由底部的移动部和顶部的操作部组成,所述移动部和操作部之间通过安装底座进行固定,并由设置在安装底座的控制器进行控制,所述移动部包括车体和车轮,车轮安装在车体底部,通过第一电机进行驱动,并在车体上分别设置有激光导航模块,避障雷达和天线,其中激光导航模块和避障雷达均与控制器电路连接并通过控制器进行控制,激光导航模块和避障雷达用以辅助机器人本体正常行驶防止其碰撞,所述天线用以控制器接收外部远程设备指令,控制机器人本体进行移动和工作。
3、作为优选:所述操作部包括摄像机,操作台以及人机交互显示屏,均与控制器线路连接,并由控制器进行控制,其中所述摄像机与安装底座之间通过电动伸缩杆进行连接,且摄像机设置在电动伸缩杆远离在安装底座一侧端部,摄像机的一侧下方设置有操作台,所述操作台设置在电动伸缩杆侧身延伸出的机械伸缩手臂端部,电动伸缩杆和机械伸缩手臂均由控制器进行控制,通过控制机械伸缩手臂调整操作台的垂直高度后,操作台进行操作,用以完成触碰装置按钮的动作指令,其操作台的相对一侧位于摄像机的下方还设置带有nfc模块的人机交互显示屏,在人机交互显示屏上设置有人机交互界面,并通过nfc模块用以远程给机器人下达操作指令。
4、作为优选:所述摄像机上设置有高清摄像头和红外测温仪,其中高清摄像头具备人脸识别功能,用于监测现场检修维护人员身份信息以及状态,红外测温仪用以检测机器人附近的物体或者人员,高清摄像头配和红外测温仪捕捉到非允许进入人员出现在检修现场时,将数据发送给控制器,控制设置在机器人本体内部的语音报警器发出语音警报。
5、作为优选:所述操作台上分别设置有辅助高清摄像头和激光测距模块,均通过控制器进行控制,其中辅助高清摄像头用于获取保护装置画面,激光测距模块用于触碰装置按钮时的定位,并在辅助高清摄像头的正下方位于操作台上还设置有一个长方形导轨,长方形导轨内嵌入安装有一个可伸缩顶针,可伸缩顶针的直径与长方形导轨的宽度相同,在控制器的控制下,用以完成可伸缩顶针在长方形导轨内的左右位移以及伸缩动作。
6、作为优选:所述激光测距模块为至少两个激光测距探头,其中一个激光测距探头设置在靠近辅助高清摄像头的一侧,其另一个激光测距探头设置在操作台的底部位于可伸缩顶针的正下方位置。
7、作为优选:所述控制器内设置有控制芯片,该控制芯片由无线模块,接收模块,控制模块和电源模块组成,之间通过线路相连,其中无线模块与天线相连接,用以机器人具备wifi及5g通信功能,远程接受外部连接设备的信息指令,所述接收模块用以分别接收高清摄像头,红外测温仪,激光导航模块,避障雷达,辅助高清摄像头,激光测距探头以及人机交互显示屏发送的信息,并将接收的信息发送给控制模块,通过控制模块控制第一电机和第二电机的运作,从而控制机器人进行相应的移动和工作,所述电源模块用以外接电源,对整个机器人进行供电。
8、作为优选:所述车体上设置有储物箱,用于放置用于存放检修工具,通过控制器人机交互显示屏上设置的按钮进行打开或关闭,在所述安装底座的一侧还安装有环境检测探头。
9、本实用新型的机器人具有以下功能:
10、1.具备安全行为审视功能。发现有作业人员翻越检修隔离围栏、打开非检修屏柜等行为时,提醒现场人员遵守安全作业规程,并通过摄像头进行录制视频取证。
11、2. 具备远程协助功能。巡检机器人具备wifi及5g通信模组,维护人员可使用手机软件对巡检机器人进行控制,报警信息的确认。可通过巡检机器人远程拨打电话、视屏以及组网功能,当现场检修人员因技能水平不足时可通过机器人建立组网,利用“远方人员”资源协助处理相关技术问题,以“专家会诊”方式完成缺陷的处理,方便现场检修、消缺等工作开展,方便现场检修、消缺等工作开展。
12、3. 具备继电保护装置操作功能。巡检机器人能够在激光导航定位下移动到指定屏柜,并通过辅助摄像头获得保护装置操作画面,调整好机械伸缩手臂位置后,放出可伸缩顶针,触碰装置按钮,顶针设置压力感应功能,当压力达到一定后回弹顶针,完成一次操作。
技术特征:
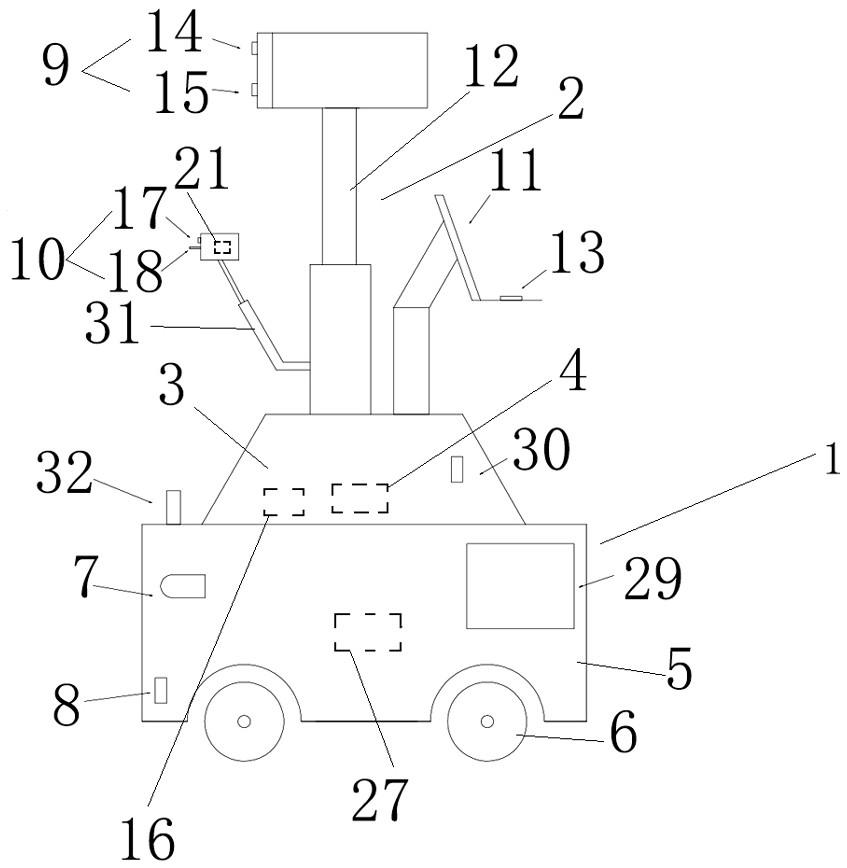
1.一种多功能智能巡检机器人,包括机器人本体,其特征在于:所述机器人本体由底部的移动部(1)和顶部的操作部(2)组成,所述移动部(1)和操作部(2)之间通过安装底座(3)进行固定,并由设置在安装底座(3)内的控制器(4)进行控制,所述移动部(1)包括车体(5)和车轮(6),车轮(6)安装在车体(5)底部,通过第一电机(27)进行驱动,并在车体(5)上分别设置有激光导航模块(7),避障雷达(8)和天线(32),其中激光导航模块(7)和避障雷达(8)均与控制器(4)电路连接并通过控制器(4)进行控制,激光导航模块(7)和避障雷达(8)用以辅助机器人本体正常行驶防止其碰撞,所述天线(32)用以控制器(4)接收外部远程设备指令,控制机器人本体进行移动和工作。
2.根据权利要求1所述的多功能智能巡检机器人,其特征在于:所述操作部(2)包括摄像机(9),操作台(10)以及人机交互显示屏(11),均与控制器(4)线路连接,并由控制器(4)进行控制,其中所述摄像机(9)与安装底座(3)之间通过电动伸缩杆(12)进行连接,且摄像机(9)设置在电动伸缩杆(12)远离在安装底座(3)一侧端部,摄像机(9)的一侧下方设置有操作台(10),所述操作台(10)设置在电动伸缩杆(12)侧身延伸出的机械伸缩手臂(31)端部,电动伸缩杆(12)和机械伸缩手臂(31)均由控制器(4)进行控制,通过控制机械伸缩手臂(31)调整操作台(10)的垂直高度后,操作台(10)进行操作,用以完成触碰装置按钮的动作指令,其操作台(10)的相对一侧位于摄像机(9)的下方还设置带有nfc模块(13)的人机交互显示屏(11),在人机交互显示屏(11)上设置有人机交互界面,并通过nfc模块(13)用以远程给机器人下达操作指令。
3.根据权利要求2所述的多功能智能巡检机器人,其特征在于:所述摄像机(9)上设置有高清摄像头(14)和红外测温仪(15),其中高清摄像头(14)具备人脸识别功能,用于监测现场检修维护人员身份信息以及状态,红外测温仪(15)用以检测机器人附近的物体或者人员,高清摄像头(14)配和红外测温仪(15)捕捉到非允许进入人员出现在检修现场时,将数据发送给控制器(4),控制设置在机器人本体内部的语音报警器(16)发出语音警报。
4.根据权利要求2所述的多功能智能巡检机器人,其特征在于:所述操作台(10)上分别设置有辅助高清摄像头(17)和激光测距模块(18),均通过控制器(4)进行控制,其中辅助高清摄像头(17)用于获取保护装置画面,激光测距模块(18)用于触碰装置按钮时的定位,并在辅助高清摄像头(17)的正下方位于操作台(10)上还设置有一个长方形导轨(19),长方形导轨(19)内嵌入安装有一个可伸缩顶针(20),可伸缩顶针(20)的直径与长方形导轨(19)的宽度相同,在控制器的控制下,用以完成可伸缩顶针(20)在长方形导轨(19)内的左右位移以及伸缩动作。
5.根据权利要求4所述的多功能智能巡检机器人,其特征在于:所述激光测距模块(18)为至少两个激光测距探头(22),其中一个激光测距探头(22)设置在靠近辅助高清摄像头(17)的一侧,其另一个激光测距探头(22)设置在操作台(10)的底部位于可伸缩顶针(20)的正下方位置。
6.根据权利要求1-4任意一项所述的多功能智能巡检机器人,其特征在于:所述控制器(4)内设置有控制芯片(23),该控制芯片(23)由无线模块(24),接收模块(25),控制模块(26)和电源模块(33)组成,之间通过线路相连,其中无线模块(24)与天线(32)相连接,用以机器人具备wifi及5g通信功能,远程接受外部连接设备的信息指令,所述接收模块(25)用以分别接收高清摄像头(14),红外测温仪(15),激光导航模块(7),避障雷达(8),辅助高清摄像头(17),激光测距探头(22)以及人机交互显示屏(11)发送的信息,并将接收的信息发送给控制模块(26),通过控制模块(26)控制第一电机(27)和第二电机(21)的运作,从而控制机器人进行相应的移动和工作,所述电源模块(33)用以外接电源,对整个机器人进行供电。
7.根据权利要求1所述的多功能智能巡检机器人,其特征在于:所述车体(5)上设置有储物箱(29),用于放置用于存放检修工具,通过控制器(4)人机交互显示屏(11)上设置的按钮进行打开或关闭,在所述安装底座(3)的一侧还安装有环境检测探头(30)。
技术总结
本技术为多功能智能巡检机器人,属于继电保护、测控装置、开关柜设备巡检领域。本技术包括机器人本体,所述机器人本体由底部的移动部和顶部的操作部组成,所述移动部和操作部之间通过安装底座进行固定,并由设置在安装底座内的控制器进行控制,所述移动部包括车体和车轮,车轮安装在车体底部,通过第一电机进行驱动,并在车体上分别设置有激光导航模块,避障雷达和天线,其中激光导航模块和避障雷达均与控制器电路连接并通过控制器进行控制,激光导航模块和避障雷达用以辅助机器人本体正常行驶防止其碰撞,所述天线用以控制器接收外部远程设备指令,控制机器人本体进行移动和工作。
技术研发人员:杨长存,杨洪涛,张琴林,梁东方,高万鑫,曹小燕,吴礼军,裴丽秋,承浩,张茂兵,周丽丽
受保护的技术使用者:淮浙煤电有限责任公司凤台发电分公司
技术研发日:20220615
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!