一种ZC204型机械手的拆装装置的制作方法
一种zc204型机械手的拆装装置
技术领域
1.本实用新型涉及机械设备领域,尤其涉及一种zc204型机械手的拆装装置。
背景技术:
2.zc204型机械手位于某厂分装热室岗位,共有四支,主要用于完成乏燃料组件剪切料液以及高放样品的取样、稀释以及装瓶等一系列动作,之后被稀释的样品才可转到其他分析岗位进行后续分析,在此过程中,只要有一支机械手出现故障,就会影响料液样品的取样、稀释及分样工作,就无法提供准确的料液数据给工艺运行人员,若因工艺人员长时间未收到分析数据、无法掌控系统的稳定程度,就会使整个工艺系统停车。提高zc204型机械手的检修效率就能更快捷的为工艺运行反馈可靠的数据,从而使工艺运行更加的稳定可靠。且 zc204型机械手在分装热室前区须整体拆除、检修后回装,热室前区受建设影响未设置吊车等辅助起重设备,以往均通过临时搭建脚手架、多人配合进行拆除、检修及回装,费时费力且安全风险大。
3.综上,为保障乏燃料后处理厂后续生产任务的顺利进行,需研制一套 zc204型机械手拆装装置来辅助检修人员快速、方便地完成zc204型机械手的拆装机检修工作。
技术实现要素:
4.本实用新型要解决的技术问题是:提供一种zc204型机械手的拆装装置,辅助检修人员实现对zc204型机械手的快速拆专、安全检修,同时降低检修人员体表沾污及机械手倾覆伤人的可能,间接保证生产线连续稳定运行。
5.本实用新型提供了一种zc204型机械手的拆装装置,包括:
6.基体,基体上设置顶升机构及副顶升机构,基体四周铰接安装锁紧脚支座;基体的侧面还对称安装2块脚踏板;
7.伸出机构,底部与主顶升机构的顶部连接,其伸出方向与主顶升机构运动方向垂直。
8.优选地,所述基体上还设置有支撑箱体,支撑箱体上连接电控箱。
9.优选地,所述主顶升机构包括:
10.蜗轮蜗杆升降机,与支撑组件的上端连接,其升降丝杆下端在支撑组件的内部空腔内伸缩,升降丝杆上端设置顶升托盘;
11.所述蜗轮蜗杆升降机一端与伺服电机连接,另一端设置有手动应急手轮;伺服电机驱动蜗轮蜗杆升降机,进而带动丝杠上升下降使伸出机构实现上升下降动作;
12.所述支撑组件的下端与基体连接。
13.优选地,所述支撑组件为铝合金管,其上端及下端均设置有安装板,通过安装板分别与基体及蜗轮蜗杆升降机以螺栓连接。
14.优选地,所述伸出机构包括:
15.支撑板,下部与所述顶升托盘连接,上部安装有导轨;
16.移动板与导轨钳制器连接后,整体再与导轨组合连接,形成伸出机构的执行部分;
17.导轨与导轨钳制器配合使用,
18.电机减速器驱动输出端齿轮配合焊接安装在移动板上的齿条,以带动伸出执行部分实现伸出、退回动作;移动板前端居中安装有机械手支撑抱箍,支撑抱箍为两片环形板组成。
19.优选地,所述副顶升机构包括:导向柱,直线轴承组,安装底板,锁紧手轮,锁紧丝杠,夹紧夹爪,直线导轨,伺服电机与升降机;
20.2套直线轴承组将伺服电机与升降机固定在基体的框架上,实现将升降机顶升力传递该拆装装置基体,同时直线轴承组对导向柱形成约束,使得导向柱可沿直线上升下降;
21.安装底板的下端面与升降机丝杆上部的顶升托盘连接,其上端面安装有锁紧手轮、锁紧丝杠、夹紧夹爪及直线导轨;
22.锁紧手轮与锁紧丝杆焊接固定,夹紧夹爪腰部开孔安装锁紧丝杆配合螺母,根部与直线导轨滑块以螺栓连接,两点定位保证夹紧夹爪运行平稳。
23.优选地,所述夹紧夹爪上粘接三元乙丙橡胶垫。
24.优选地,所述锁紧丝杆分两段分别加工有正反t型螺纹。
25.优选地,所述电控箱内设置空气断路器、交流接触器、中间继电器、热继电器及操作手柄,实现半自动控制及远距离操作。
26.优选地,所述基体底部焊接有行走轮,所述行走轮包括2个定向轮和2 个万向轮。
27.与现有技术相比,本实用新型的zc204型机械手的拆装装置,配合zc204 型机械手的结构进行设计,适用于zc204型机械手的拆装及检修。所述装置的两个顶升机构可以稳固支撑zc204型机械手;基体稳固,便于支撑顶升机构以及检修人员进行操作。当zc204型机械手出现故障时,使用本zc204型机械手拆装装置对机械手进行检修,从以前人工搭设脚手架进行拆卸所需至少三小时缩短至一小时,检修人员受照剂量值大幅降低,且本装置设计了电控系统,实现对整个系统的操控,提高了机械手检修的自动化水平及检修效率,较以往检修减少了人力投入,也减少了检修过程中人员的剂量沾污。
附图说明
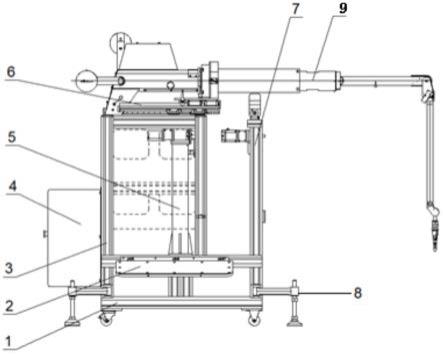
28.图1表示zc204型机械手的拆装装置的结构示意图;
29.图2表示主顶升机构的结构示意图;
30.图3表示主顶升机构的a向剖视图;
31.图4表示伸出机构的俯视图;
32.图5表示伸出机构的侧视图;
33.图6表示副顶升机构的结构示意图;
34.图7表示副顶升机构的侧视图;
35.图中:
36.1—基体;2—踏板;3—支撑箱体;4—电控箱;5—主顶升机构;6—伸出机构;7—副顶升机构;8—锁紧脚支座;9—zc204型机械手;5-1—伺服电机; 5-2—手动应急手轮;5-3—蜗轮蜗杆升降机;5-4—支撑组件;6-1—导轨;6-2 —支撑抱箍;6-3—支撑板;6-4—导轨钳制器;6-5—移动板;6-6—电机减速器;7-1—导向柱;7-2—直线轴承组;7-3—安装底
板;7-4—锁紧手轮;7-5—锁紧丝杠;7-6—夹紧夹爪;7-7—直线导轨;7-8—伺服电机与升降机。
具体实施方式
37.为了进一步理解本实用新型,下面结合实施例对本实用新型的实施方案进行描述,但是应当理解,这些描述只是为进一步说明本实用新型的特征和优点,而不是对本实用新型的限制。
38.参照zc204型机械手的拆卸和安装过程,其主动臂、穿墙管及从动臂不可分开拆卸及安装,必须在热室前区整体拆出、检修后回装。考虑到zc204 型机械手拆装装置要能够实现快速转运、拆卸、组装,将本拆装装置进行了模块化。
39.本实用新型的实施例公开了一种zc204型机械手的拆装装置,如图1所示,包括:
40.基体1,基体1上设置顶升机构5及副顶升机构7,基体1四周铰接安装锁紧脚支座8;基体1的侧面还对称安装2块脚踏板2;
41.伸出机构6,底部与主顶升机构5的顶部连接,其伸出方向与主顶升机构 5运动方向垂直。
42.所述基体1为铝合金型材制成的框架,作为整个拆装装置的支撑底座,其支撑重量不小于1000
㎏
。基体1上安装两块脚踏板2,以方便检修zc204型机械手时人员踩踏,其采用螺栓-合页连接形式实现灵活连接,使用时利用球头柱塞进行锁紧;框架四周铰接安装4个锁紧脚支座,支座支腿利用螺栓实现高低调整,当检修人员需踩踏脚踏板2时,展开锁紧脚支座并调节支腿高度,以保证拆装装置整体稳定,防止人员踩踏时发生侧翻。
43.为了运输方便,优选地,所述基体1底部焊接有行走轮,所述行走轮包括 2个定向轮和2个万向轮,实现小车行走及到位锁定。
44.所述基体1上还设置有支撑箱体3,支撑箱体3上连接电控箱4。
45.支撑箱体3主要为不锈钢型材制作,减轻重量且有较高的强度,为各模块安装提供支撑基础。电控箱4采用螺栓连接在支撑箱体3上,其内设置空气断路器、交流接触器、中间继电器、热继电器、操作手柄等元器件,实现拆装装置半自动控制及远距离操作(在2m延长线范围内)。
46.如图2和图3所示,主顶升机构5由伺服电机5-1、手动应急手轮5-2、蜗轮蜗杆升降机5-3、与支撑组件5-4组成,为zc204型机械手的顶升提供动力。支撑组件5-4主体采用铝合金管制成,起到支撑作用,其上、下端设有安装板,分别与基体1、蜗轮蜗杆升降机5-3以螺栓连接;蜗轮蜗杆升降机5-3 一端与伺服电机5-1连接,另一端设置有手动应急手轮5-2,保证装置运行过程临时断电后仍可由操作人员转动应急手轮,实现主顶升机构的升降功能,其升降丝杆下端在支撑组件5-4的内部空腔内伸缩,丝杆上端设置顶升托盘,与伸出机构6的支撑板6-3采用螺栓连接。当主顶升机构5驱动运行时,伺服电机5-1驱动蜗轮蜗杆升降机5-3,进而带动丝杠上升下降使伸出机构6可实现上升下降动作。
47.如图4和图5所示,伸出机构6由导轨6-1、支撑抱箍6-2、支撑板6-3、导轨钳制器6-4、移动板6-5、电机减速器6-6组成,为机械手从穿墙管中抽出提供动力。导轨6-1与导轨钳制器6-4配合使用,为成品直线导轨产品,可使伸出机构沿直线轻松的实现伸出、退回动作;支撑板6-3采用不锈钢板与铝合金型材拼接、螺栓固定而成,下部与主顶升机构5的蜗轮蜗
杆升降机5-3丝杆上端顶升托盘以螺栓连接,上部焊接安装有导轨6-1;移动板6-5与导轨钳制器6-4采用螺栓连接后,整体再与导轨6-1组合连接,形成伸出机构6的执行部分;电机减速器6-6驱动输出端齿轮配合焊接安装在移动板6-5上的齿条,以带动伸出执行部分实现伸出、退回动作;移动板6-5前端居中安装有机械手支撑抱箍6-2,两者采用螺栓连接,支撑抱箍6-2为两片环形板组成,配合合页、紧固螺栓将机械手“环抱式”锁紧,在机械手抽出穿墙管时起固定机械手的作用,在伸出机构6后退时带动机械手从热室预埋套管中抽出。
48.如图6和7所示,副顶升机构7由导向柱7-1、直线轴承组7-2、安装底板7-3、锁紧手轮7-4、锁紧丝杠7-5、夹紧夹爪7-6、直线导轨7-7、伺服电机与升降机7-8组成,在机械手从热室预埋套管中抽出时起支点、辅助支撑作用,使得机械手能够平稳拖出。副顶升机构7整体以螺栓连接安装在基体1的框架上,2套直线轴承组7-2以螺栓连接形式将伺服电机与升降机7-8固定在基体 1的框架上,以实现将升降机顶升力传递该拆装装置基体1,同时直线轴承组7-2对导向柱7-1形成约束,使得导向柱可沿直线上升下降;安装底板7-3为不锈钢材质,为副顶升机构7的锁紧部分提供安装基础,其下端面与升降机丝杆上部顶升托盘连接,上端面安装有锁紧手轮7-4、锁紧丝杠7-5、夹紧夹爪 7-6及直线导轨7-7;锁紧手轮7-4与锁紧丝杆7-5焊接固定,夹紧夹爪7-6腰部开孔安装锁紧丝杆7-5配合螺母,根部与直线导轨滑块以螺栓连接,亮点定位保证夹紧夹爪7-6运行平稳,且夹紧夹爪7-6上粘接三元乙丙橡胶垫,可增大伸出机构6回退时夹爪与机械手的摩擦;锁紧丝杆7-5分两段分别加工有正反t型螺纹,操作时操作人员通过手摇锁紧手轮7-4带动锁紧丝杆7-5,配合螺纹驱动夹紧夹爪7-6向内、外运动,实现机械手的辅助夹紧。当副顶升机构 7需要驱动运行时,伺服电机与升降机7-8驱动丝杠上升下降,带动夹紧夹爪 7-6实现上升下降动作。
49.本拆装装置用于实现将zc204型机械手从热室墙体预埋套管中拆出、在热室前区支撑机械手便于检修人员检修维护。由于zc204型机械手非常沉重,且长度较长,抽出过程重心位置不断发生变动,检修时配合使用主顶升机构5、伸出机构6、副顶升机构7,使得机械手在拆装过程中重心始终在基体1的支撑范围内,保证机械手在抽出或者安装的过程中重心调整,防止拆装装置倾倒。
50.当zc204型机械手出现故障时,使用该拆装装置,检修人员可快速、安全地实现对zc204型机械手的检修,其具体实施流程如下:
51.1)检修人员在分装热室前区,将本拆装装置进行组装;
52.2)检修人员将拆装装置推放至zc204型机械手9的正下方,调整好工作位置,保证拆装装置紧靠热室前区墙面,并锁紧万向轮;
53.3)检修人员拆除机械手穿墙预埋套管法兰上的连接螺栓;
54.4)检修人员将机械手穿墙组件拉出一小部分,用于主顶升机构5进行托举;
55.5)检修人员启动主顶升机构5的伺服电机5-1,待其托举环接触到机械手穿墙管时,操作伸出机构6的支撑抱箍6-2,将机械手穿墙管段锁紧固定;
56.6)检修人员启动伸出机构6的驱动电机减速器6-6,将机械手穿墙管整体抽出,抽出约0.4m时,停止伸出机构6的运行;
57.7)检修人员启动副顶升机构7的电机,待夹紧夹爪7-6接触到机械手从动臂,操作人员手摇锁紧手轮7-4实现机械手的辅助夹紧;
58.8)检修人员打开拆装装置基座上万向轮的锁紧,推动拆装装置将整个 zc204型机
械手从热室穿墙预埋套管中抽出;
59.9)检修人员对zc204型机械手进行检修(必要时打开脚踏板2辅助检修)
60.10)回装过程与上述过程相反。
61.以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
62.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1