多自由度调节机器人的制作方法
1.本实用新型涉及一种多自由度调节机器人。
背景技术:
2.用于需要利用机器人夹取或吸取物品,然后将物品移动到指定位置时,当位置固定时,机器人仅需带动作业装置安装平台靠近物品,然后作业装置安装平台的夹爪或吸盘夹取或吸取物品,然后机器人带动作业装置安装平台移动至指定位置,此时夹爪或吸盘释放物品,物品即可跌落至指定位置。
3.若位置变化时,现有的机器人无法直接执行工作,需要用户先对机器人进行调控,调整机器人结构,才能令机器人针对当前位置执行任务,每一次调节位置均需要人工拆装机器人,操作繁琐,甚至一下位置既改变角度以及改变高度的,则现有机器人无法处理,降低机器人的实用性。
技术实现要素:
4.本实用新型的目的在于提供一种可以x轴、y轴和z轴调节作业装置安装平台的多自由度调节机器人。
5.本实用新型的目的是这样实现的:
6.一种多自由度调节机器人,包括平台、作业装置安装平台、第一连杆装置、第一电机、第二连杆装置、第二电机、竖向导轨和升降装置,其特征在于:
7.所述第一电机设置在平台上,所述第一连杆装置一端连接第一电机的转轴,第一连杆装置另一端连接作业装置安装平台,所述第二电机设置在平台上,所述第二连杆装置一端连接第二电机的转轴,第二连杆装置另一端连接作业装置安装平台,所述第一电机和/或第二电机通过第一连杆装置和第二连杆装置共同带动作业装置安装平台沿x轴和y轴组成的平面坐标系内移动;
8.所述平台以滑动方式设置在竖向导轨上,所述升降装置和平台连接,升降装置带动平台沿沿z轴方向移动,从而带动作业装置安装平台沿z轴方向移动。
9.所述作业装置安装平台通过第一电机、第二电机和升降装置,实现平面坐标系内和z轴方向调节,作业装置安装平台的调节范围广,位置调节精准,而且第一电机通过第一连杆装置和第二连杆装置带动作业装置安装平台移动,第一电机旋转小角度即可实现作业装置安装平台的角度调节,第二电机通过第一连杆装置和第二连杆装置带动作业装置安装平台移动,第二电机旋转小角度即可实现作业装置安装平台的角度调节,调节快速,轻负载。
10.本实用新型的目的还可以采用以下技术措施解决:
11.进一步地,还包括第三电机和便于作业装置安装的底板,所述第三电机设置在作业装置安装平台上,第三电机的转轴伸出作业装置安装平台下方并连接底板,第三电机带动底板旋转。
12.所述作业装置安装在底板上,当第三电机通过底板带动作业装置旋转,令作业装置具备旋转功能,增加作业装置的功能,满足不同的作业需求,大大提高多自由度调节机器人的实用性。
13.进一步地,所述作业装置为磁吸盘或夹爪。
14.进一步地,所述升降装置包括丝杆、螺母和升降电机,所述丝杆以转动方式设置在竖向导轨上,所述螺母套置在丝杆上,所述升降电机和丝杆连接,升降电机带动丝杆旋转,螺母沿丝杆升降,所述平台和螺母连接,平台跟随螺母升降。
15.进一步地,还包括左旋转块和右旋转块,所述第一电机设置在平台的底部左侧,第一电机的转轴伸出平台上连接左旋转块,第一电机带动左旋转块旋转,所述第二电机设置在平台的底部右侧,第二电机的转轴伸出平台上连接右旋转块,第二电机带动右旋转块旋转。
16.进一步地,所述第一连杆装置包括第一前连杆、第一连接座和第一后连杆,所述第一前连杆一端连接左旋转块,第一前连杆另一端和第一连接座活动连接,所述第一后连杆一端和第一连接座活动连接,第一后连杆另一端和作业装置安装平台活动连接。
17.所述第一连杆装置包括第一前连杆和第一后连杆,第一电机通过第一前连杆和第一后连杆带动作业装置安装平台移动,由于采用第一前连杆和第一后连杆,第一电机旋转小角度即可实现作业装置安装平台的角度调节,调节快速,轻负载。
18.进一步地,还包括第一连接件,所述第一后连杆有三根,其中两根第一后连杆呈一上一下布置,所述第一连接件包括第一上套筒、第一竖杆和第一下套筒,所述第一竖杆一端连接第一上套筒,第一竖杆另一端连接第一下套筒,所述第一上套筒套置在上方的第一后连杆上,第一下套筒套置在下方的第一后连杆上。
19.所述两根呈一上一下布置的第一后连杆通过第一连接件连接,避免第一后连杆偏移,大大提高作业装置安装平台的位置调节精度。
20.进一步地,所述第二连杆装置包括第二前连杆、第二连接座和第二后连杆,所述第二前连杆一端连接左旋转块,第二前连杆另一端和第二连接座活动连接,所述第二后连杆一端和第二连接座活动连接,第二后连杆另一端和作业装置安装平台活动连接。
21.所述第一连杆装置包括第一前连杆和第一后连杆,第一电机通过第一前连杆和第一后连杆带动作业装置安装平台移动,由于采用第一前连杆和第一后连杆,第一电机旋转小角度即可实现作业装置安装平台的角度调节,调节快速,轻负载。
22.进一步地,还包括第二连接件,所述第二后连杆有三根,其中两根第二后连杆呈一上一下布置,所述第二连接件包括第二上套筒、第二竖杆和第二下套筒,所述第二竖杆一端连接第二上套筒,第二竖杆另一端连接第二下套筒,所述第二上套筒套置在上方的第二后连杆上,第二下套筒套置在下方的第二后连杆上。
23.所述两根呈一上一下布置的第二后连杆通过第二连接件连接,避免第二后连杆偏移,大大提高作业装置安装平台的位置调节精度。
24.本实用新型的有益效果如下:
25.本实用新型,所述作业装置安装平台通过第一电机、第二电机和升降装置,实现平面坐标系内和z轴方向调节,作业装置安装平台的调节范围广,位置调节精准,而且第一电机通过第一连杆装置和第二连杆装置带动作业装置安装平台移动,第一电机旋转小角度即
可实现作业装置安装平台的角度调节,第二电机通过第一连杆装置和第二连杆装置带动作业装置安装平台移动,第二电机旋转小角度即可实现作业装置安装平台的角度调节,调节快速,轻负载。
26.本实用新型,所述作业装置安装在底板上,当第三电机通过底板带动作业装置旋转,令作业装置具备旋转功能,增加作业装置的功能,满足不同的作业需求,大大提高多自由度调节机器人的实用性。
附图说明
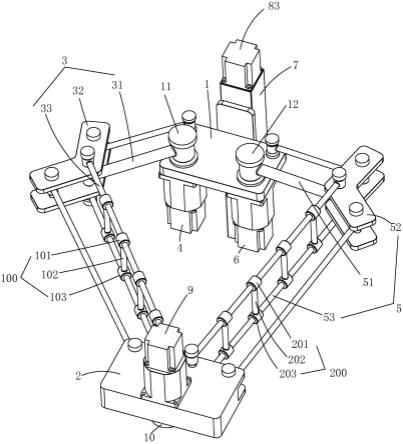
27.图1为多自由度调节机器人的示意图。
28.图2为多自由度调节机器人的另一角度示意图。
29.图3为多自由度调节机器人的俯视图。
30.图4为多自由度调节机器人的主视图。
31.图5为多自由度调节机器人的剖面示意图。
32.图6为多自由度调节机器人的另一角度剖面示意图。
33.图7为多自由度调节机器人的另一角度剖面示意图。
34.图8为多自由度调节机器人的示意图(平面坐标系内调节)。
35.图9为多自由度调节机器人的俯视图(平面坐标系内调节)。
36.图10为多自由度调节机器人的主视图(平面坐标系内调节)。
37.图11为多自由度调节机器人的示意图(平面坐标系内和z轴方向调节)。
38.图12为多自由度调节机器人的俯视图(平面坐标系内和z轴方向调节)。
39.图13为多自由度调节机器人的主视图(平面坐标系内和z轴方向调节)。
具体实施方式
40.下面结合附图及实施例对本实用新型作进一步描述:
41.实施例,结合图1到图13所示,一种多自由度调节机器人,包括平台1、作业装置安装平台2、第一连杆装置3、第一电机4、第二连杆装置5、第二电机6、竖向导轨7、升降装置8、第三电机9、便于作业装置安装的底板10、左旋转块11、右旋转块12、第一连接件100、第二连接件200和作业装置(图中未出示)。
42.所述升降装置8包括丝杆81、螺母82和升降电机83,所述丝杆81以转动方式设置在竖向导轨7上,所述螺母82套置在丝杆81上,所述升降电机83和丝杆81连接,升降电机83带动丝杆81旋转,螺母82沿丝杆81升降,所述平台1和螺母82连接,平台1跟随螺母82升降。
43.所述第一电机4设置在平台1的底部左侧,第一电机4的转轴伸出平台1上连接左旋转块11,第一电机4带动左旋转块11旋转。
44.所述第二电机6设置在平台1的底部右侧,第二电机6的转轴伸出平台1上连接右旋转块12,第二电机6带动右旋转块12旋转。
45.所述第三电机9设置在作业装置安装平台2上,第三电机9的转轴伸出作业装置安装平台2下方并连接底板10,第三电机9带动底板10旋转,所述作业装置连接底板10,作业装置为磁吸盘或夹爪。
46.所述第一连杆装置3包括第一前连杆31、第一连接座32和第一后连杆33,所述第一
前连杆31一端连接左旋转块11,第一前连杆31另一端和第一连接座32活动连接,所述第一后连杆33一端和第一连接座32活动连接,第一后连杆33另一端和作业装置安装平台2活动连接。
47.所述第一后连杆33有三根,其中两根第一后连杆33呈一上一下布置,所述第一连接件100包括第一上套筒101、第一竖杆102和第一下套筒103,所述第一竖杆102一端连接第一上套筒101,第一竖杆102另一端连接第一下套筒103,所述第一上套筒101套置在上方的第一后连杆33上,第一下套筒103套置在下方的第一后连杆33上。
48.所述第二连杆装置5包括第二前连杆51、第二连接座52和第二后连杆53,所述第二前连杆51一端连接左旋转块11,第二前连杆51另一端和第二连接座52活动连接,所述第二后连杆53一端和第二连接座52活动连接,第二后连杆53另一端和作业装置安装平台2活动连接。
49.所述第二后连杆53有三根,其中两根第二后连杆53呈一上一下布置,所述第二连接件200包括第二上套筒201、第二竖杆202和第二下套筒203,所述第二竖杆202一端连接第二上套筒201,第二竖杆202另一端连接第二下套筒203,所述第二上套筒201套置在上方的第二后连杆53上,第二下套筒203套置在下方的第二后连杆53上。
50.工作原理:
51.所述升降电机83工作,升降电机83带动平台1升降,从而带动作业装置安装平台2沿z轴移动,调整作业装置安装平台2的z轴方向位置。
52.所述第一电机4工作,第一电机4通过第一连杆装置3和第二连杆装置5共同带动作业装置安装平台2沿x轴和y轴组成的平面坐标系内移动,调整作业装置安装平台2的位置。
53.所述第二电机6工作,第二电机6通过第一连杆装置3和第二连杆装置5共同带动作业装置安装平台2沿x轴和y轴组成的平面坐标系内移动,调整作业装置安装平台2的位置。
54.所述第一电机4和第二电机6共同工作,第一电机4和第二电机6共同通过第一连杆装置3和第二连杆装置5共同带动作业装置安装平台2沿x轴和y轴组成的平面坐标系内移动,调整作业装置安装平台2的位置。
55.所述第三电机9带动底板10旋转,从而带动作业装置旋转。
56.上述作业装置安装平台2通过第一电机4、第二电机6和升降电机83,实现x轴、y轴和z轴方向调节,作业装置安装平台2的调节范围广,位置调节精准。
57.而且,第一电机4通过第一连杆装置3和第二连杆装置5带动作业装置安装平台2移动,第一电机4旋转小角度即可实现作业装置安装平台2的角度调节,第二电机6通过第一连杆装置3和第二连杆装置5带动作业装置安装平台2移动,第二电机6旋转小角度即可实现作业装置安装平台2的角度调节,调节快速,轻负载。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1