一种用于取放汽车安全带卡扣的机器人夹具的制作方法
1.本实用新型属于自动化设备技术领域,尤其涉及一种用于取放汽车安全带卡扣的机器人夹具。
背景技术:
2.随着自动化技术的快速发展,机器人夹具已经渗透进各行各业,其主要作用是代替人工的抓取工作,可有效地提高生产效率及工作的安全性。在精密加工领域,越来越多的人工操作被替代为自动化操作,以达到更高的精度要求和生产效率,工件在不同工位间的转换,经常需要用到机器人夹具来实现。
3.在实际生产中,需要根据被夹取物的大小形状,设计合适的夹具,这关系着夹取工件时的状态是否平稳,夹持力过大,夹取过程中容易损坏工件,使工件表面磨损,甚至变形或断裂;同时,汽车安全带卡扣出厂前需要在其表面进行图样、二维码等标识性的打标处理,其次需要对其检测,将标识不清楚的安全带卡扣挑出输送至不合格品区,本领域技术人员亟待解决这一技术问题。
技术实现要素:
4.针对现有技术所存在的上述不足,本实用新型提供一种用于取放汽车安全带卡扣的机器人夹具。
5.为实现上述目的,本实用新型提供了如下技术方案:
6.一种用于取放汽车安全带卡扣的机器人夹具,包括基座,所述基座上设置有导杆,所述导杆上套接有锁合块,所述锁合块可沿导杆周向旋转及上下直线位移调节,所述锁合块一侧连接有横向驱动组件,所述横向驱动组件远离所述锁合块的一侧连接有纵向驱动组件,所述纵向驱动组件下端连接有夹持组件,所述夹持组件开合运动,用于取放安全带卡扣;
7.所述纵向驱动组件上连接有识别组件,所述识别组件对应设置在所述夹持组件前侧,识别组件先一步对安全带卡扣进行检测,夹持组件再进行夹持作业;
8.所述横向驱动组件设置有立板,所述立板与所述锁合块固定连接,所述立板一侧上部设置有无杆气缸,下部设置有线轨滑块,所述线轨滑块与所述无杆气缸平行设置,所述线轨滑块与所述无杆气缸之间设置过渡块连接,所述过渡块上连接所述纵向驱动组件,所述线轨滑块两端对应立板上设置有限位块,2个所述限位块外侧设置有固定块,所述固定块与所述立板垂直设置,2个所述固定块上贯穿设置有调节螺杆,2个所述调节螺杆相对设置,所述调节螺杆对应所述过渡块侧面设置,限制所述纵向驱动组件的横向移动间距。
9.进一步的,所述纵向驱动组件设置为mgg系列带导杆气缸,内置液压缓冲器。
10.进一步的,所述夹持组件设置有t形块,所述t形块上端连接所述纵向驱动组件,下端连接有气动夹爪,所述气动夹爪设置为平行气爪,所述气动夹爪下端分别连接有夹持件,2个所述夹持件相对的内侧面连接有辅助夹持件,所述辅助夹持件与所述夹持件底部错开
设置。
11.进一步的,所述夹持件设置为铜或铜合金,所述辅助夹持件设置为橡胶件。
12.进一步的,所述识别组件设置有l型支撑块,所述l型支撑块固定在所述气动夹爪上,所述l型支撑块下端连接有相机。
13.进一步的,所述导杆截面形状设置圆形,所述导杆与所述锁合块设置螺栓连接。
14.有益效果:本实用新型所述的一种用于取放汽车安全带卡扣的机器人夹具,所述锁合块可沿导杆周向旋转及上下直线位移调节,辅助夹具调节位置,横向驱动组件设置调节螺杆,限制所述纵向驱动组件的横向移动间距,实现抓取精准定位,对应的所述立板上设置有限位块,双重限位防护,提高了设备的安全性;
15.纵向驱动组件内置液压缓冲器,耐横向负载能力强,使夹持组件能够稳定拾取作业,辅助夹持件设置为橡胶件,橡胶底面先接触安全带卡扣,稳定安全带卡扣后,依靠夹持件实现夹紧,防止在抓紧过程中出现掉落的情况,设置识别组件,整个过程无需人工干预,工作效率高。
附图说明
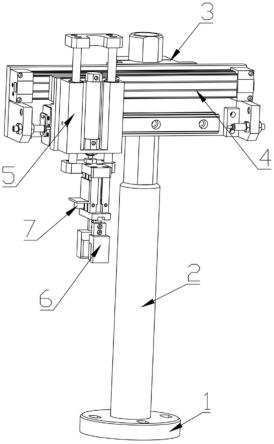
16.图1为本实用新型提供的一种用于取放汽车安全带卡扣的机器人夹具结构示意图;
17.图2为本实用新型所述横向驱动组件结构示意图;
18.图3为本实用新型所述夹持组件、识别组件结构示意图。
19.图中:1基座,2导杆,3锁合块,4横向驱动组件,401立板,402无杆气缸,403线轨滑块,404限位块,405固定块,406调节螺杆,407过渡块,5纵向驱动组件,6夹持组件,601t形块,602气动夹爪,603夹持件,604辅助夹持件,7识别组件,701l型支撑块,702相机。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.如图1-3所示,本实用新型提供一种用于取放汽车安全带卡扣的机器人夹具,包括基座1,所述基座1上设置有导杆2,所述导杆2上套接有锁合块3,所述锁合块3可沿导杆2周向旋转及上下直线位移调节,所述锁合块3一侧连接有横向驱动组件4,所述横向驱动组件4远离所述锁合块3的一侧连接有纵向驱动组件5,所述纵向驱动组件5下端连接有夹持组件6,所述夹持组件6开合运动,用于取放安全带卡扣;
22.所述纵向驱动组件5上连接有识别组件7,所述识别组件7对应设置在所述夹持组件6前侧,识别组件7先一步对安全带卡扣进行检测,识别不合格品后,夹持组件6再进行夹持作业,合格品顺势流入下道工序;
23.所述横向驱动组件4设置有立板401,所述立板401与所述锁合块3固定连接,所述立板401一侧上部设置有无杆气缸402,下部设置有线轨滑块403,所述线轨滑块403与所述无杆气缸402平行设置,所述线轨滑块403与所述无杆气缸402之间设置过渡块407连接,所
述过渡块407上连接所述纵向驱动组件5,所述线轨滑块403两端对应立板401上设置有限位块404,2个所述限位块404外侧设置有固定块405,所述固定块405与所述立板401垂直设置,2个所述固定块405上贯穿设置有调节螺杆406,2个所述调节螺杆406相对设置,所述调节螺杆406对应所述过渡块407侧面设置,限制所述纵向驱动组件5的横向移动间距,达到输送的目的。
24.在实际应用中,所述纵向驱动组件5设置为mgg系列带导杆气缸,内置液压缓冲器,缓冲效果好。
25.在实际应用中,所述夹持组件6设置有t形块601,所述t形块601上端连接所述纵向驱动组件5,下端连接有气动夹爪602,所述气动夹爪602设置为平行气爪,所述气动夹爪602下端分别连接有夹持件603,2个所述夹持件603相对的内侧面连接有辅助夹持件604,所述辅助夹持件604与所述夹持件603底部错开设置,气动夹爪602进行夹紧作业时,带动夹持件603相对移动,此时辅助夹持件604底面先接触安全带卡扣,稳定安全带卡扣后,依靠夹持件603实现夹紧。
26.在实际应用中,所述夹持件603设置为铜或铜合金,所述辅助夹持件604设置为橡胶件。
27.在实际应用中,所述识别组件7设置有l型支撑块701,所述l型支撑块701固定在所述气动夹爪602上,所述l型支撑块701下端连接有相机702。
28.在实际应用中,所述导杆2截面形状设置为圆形,利于夹具整体角度调整,所述导杆2与所述锁合块3设置螺栓连接。
29.工作原理:
30.本实用新型所述一种用于取放汽车安全带卡扣的机器人夹具,所述夹持组件6通过横向驱动组件4两端设置的调节螺杆406微调取放安全带卡扣的横向位移量,实现精准作业,所述纵向驱动组件5带动夹持组件6、识别组件7下移,所述识别组件7先一步对安全带卡扣进行检测,合格品顺势流入下道工序,识别出不合格品后,夹持组件6再进行夹持作业,气动夹爪602进行夹紧作业时,带动夹持件603相对移动,此时辅助夹持件604底面先接触安全带卡扣,稳定安全带卡扣后,依靠夹持件603实现夹紧,由横向驱动组件4、纵向驱动组件5带动夹持组件6将不合格品输送至不合格品框内,再进行下一次检测。
31.以上显示和描述了本实用新型的基本原理、主要特征及优点,文中使用的前、后、左、右非特指,主要为了更直观说明技术方案,不起限定作用。本行业的技术人员应该了解,上述实施方式只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并加以实施,并不能以此限制本实用新型的保护范围,凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1