一种物流使用柔性机械爪
1.本实用新型涉及物流机器人技术领域,尤其涉及一种物流使用柔性机械爪。
背景技术:
2.在智能仓储领域,物流机器人是实现自动化的重要环节,其中,机械手臂及其手爪主要承担货物的抓取、移动与放置工作,抓取物品时要考虑适用性、移动过程要考虑稳定性,放置时要考虑安全性。因此,其对手爪的准确性、抓取力度、作业空间都有一定的要求。但现有物流使用刚性机械手爪形状相对单一固定,抓取范围较小,对作业空间要求高,较难完成大型或复杂形状的物流包裹抓取(如多边形状、曲面物品,表面凹凸物品、不规则物品等),同时在机械爪的抓取复杂物品过程中容易造成物品的脱落。而柔性机械手爪由于缺乏刚性支撑,容易出现抓不住或抓取不牢等现象,达不到物流行业要求的稳定性。
3.基于此,本实用新型设计了一种物流使用柔性机械爪,可针对不同环境、不同尺寸、复杂形状的物品实施抓取,并且具有广泛适用性和高稳定性等优点。
技术实现要素:
4.为克服现有技术中的不足,本实用新型的目的在于提供一种夹持稳定性高的物流使用柔性机械爪。
5.为实现上述目的,本实用新型采用以下技术方案:
6.一种物流使用柔性机械爪,其包括安装底座、舵机、机械左臂和机械右臂,所述舵机固定连接在安装底座上,所述舵机底部的输出轴与机械左臂的安装部固定连接,所述安装底座上转动连接有传动轴,所述机械右臂的安装部固定套接在传动轴上,所述机械左臂的安装部与机械右臂的安装部之间通过传动齿轮组实现传动连接,所述机械左臂的夹持部和机械右臂的夹持部分别固定有柔性爪。
7.进一步的,所述柔性爪的夹持面上固定有防滑器,防滑器的夹持表面具有防滑凸起。
8.进一步的,所述舵机底部的输出轴固定有法兰盘,该法兰盘与机械左臂的安装部通过螺栓固定连接。
9.进一步的,所述机械左臂和机械右臂的夹持部上分别设有用于固定柔性爪的凹槽。
10.进一步的,所述机械右臂的安装部固定套接在传动轴的方形部上。
11.进一步的,所述机械左臂和机械右臂的中部分别固定有止停板。
12.进一步的,所述安装底座上固定有轴承座,所述传动轴与轴承座转动连接。
13.本实用新型采用以上技术方案,在机械左臂和机械右臂的前端夹持部位分别安装硅胶材质的柔性爪,同时在柔性爪夹持面加上防滑装置,能够更好地保护物流包裹,柔性爪有良好自适应性,能够更加贴合包覆物品形状,可完成复杂形状的物流包裹抓取(如多边形状、曲面物品,表面凹凸物品、不规则物品等),同时保证夹取物品的稳定性;机械左臂和机
械右臂之间采用齿轮传动连接,可完成不同尺寸或大型物品夹取,且具有良好的稳定性;在夹取不同物品时,根据物品实际摆放位置与方向,可在有限空间下采用不同的夹取方式,例如:横向夹取、纵向夹取、斜向夹取等多方向夹取方式,提高柔性机械爪夹取效率和适应性。
附图说明
14.以下结合附图和具体实施方式对本实用新型做进一步详细说明;
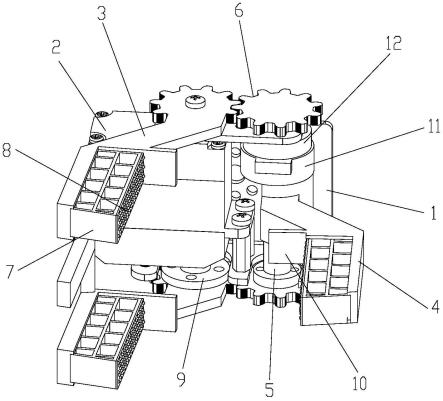
15.图1为本实用新型的立体图;
16.图2为本实用新型夹取圆柱形物品时的示意图。
具体实施方式
17.如图1-2所示,本实用新型一种物流使用柔性爪,其包括安装底座1、舵机2、机械左臂3和机械右臂4,舵机2固定连接在安装底座1上,舵机2底部的输出轴与机械左臂3的安装部固定连接,安装底座1上转动连接有传动轴5,机械右臂4的安装部固定套接在传动轴5上,机械左臂3的安装部与机械右臂4的安装部之间通过传动齿轮组6实现传动连接,机械左臂3的夹持部和机械右臂4的夹持部分别固定有柔性爪7。夹取物品过程中,以舵机2为驱动源,驱动机械左臂3,通过传动齿轮组6和传动轴5共同带动机械右臂4,机械左臂3与机械右臂4相互配合柔性爪7发生夹取的动作。
18.进一步的,柔性爪7的夹持面上固定有防滑器8,防滑器8的夹持表面具有防滑凸起。
19.进一步的,机械左臂3和机械右臂4的夹持部上分别设有用于固定柔性爪7的凹槽。各柔性爪7完全固定在机械左臂3和机械右臂4对应的凹槽上,完全固定是为了增强该夹取装置在夹取物品时不会产生意外脱落的情况,同样增强夹取时的稳定性。且柔性爪7采取特殊柔性材料(硅胶材质),呈自适应变形的柔性状态,在夹取方向和形状大小不同的物品时能够发生内凹,适应物品的形状,对物品产生包覆性,保证在夹取和运输的过程中更加安全和稳定。
20.进一步的,舵机2底部的输出轴固定有法兰盘9,该法兰盘9与机械左臂3的安装部通过螺栓固定连接。机械右臂4的安装部固定套接在传动轴5的方形部上。这样设计能够保证该柔性爪7在夹取和运输过程中,机械左臂3和机械右臂4不会随意移动,不会对柔性爪7整体结构和所夹取物品造成损坏。且采取螺栓连接能够在机械爪发生机械故障时易于拆卸检查故障问题,易于替换。在机械左臂3和机械右臂4采取传动齿轮进行传动,使机械左臂3和机械右臂4在夹取物品时能够相向运动,保证夹取物品时的稳定性。
21.进一步的,机械左臂3和机械右臂4的中部分别固定有止停板10。在夹取物品时止停板10能够固定物品,使其不会摇晃,发生掉落等其他意外事件。
22.进一步的,安装底座1上固定有轴承座11,传动轴5与轴承座11转动连接。传动轴5与轴承座11之间采取轴承的转动方式,也更加稳定,在夹取装置夹取物品时使得传动更加顺畅。此外,在轴承座11上方连接有螺旋塞12,用于固定连接传动轴5和传动齿轮组6,使得传动轴5和传动齿轮组6同步传动,保证传动更加流畅,从而传动效率和夹取效率。
23.如图2所示,在无障碍的空间中,采取该柔性爪7夹取一个圆柱形状的物品,该夹取装置按以下步骤来进行夹取:
24.(1)首先获取夹取任务后,通过舵机2和传动轴5使其机械左臂3和机械右臂4发生相向移动,伸展成为平直状,在夹取物品时能够更加稳定。
25.(2)在夹取物品时,机械左臂3和机械右臂4慢慢靠近物品侧面,在柔性爪7触碰到物品侧面的边缘时,使机械左臂3和机械右臂4纵向移动,使止停板10和物品顶部相契合。在止停板10和物品顶部相契合后,机械左臂3和机械右臂4再发生横向移动,使柔性爪7和防滑器8能够发生自形变,包覆物品侧面的形状,使其夹取机构在夹取物品时更加牢固、稳定。
26.(3)在柔性爪7和防滑器8将物品侧面包裹至2/3及其以上之后,机械左臂3和机械右臂4再次发生纵向移动,并移动至指定运输位置。
27.在运输到指定位置时,按照上述顺序相反操作,即可将物品安全、稳定地放置在指定位置,即完成了一次物流搬运任务。然后夹取装置恢复至最初状态再进行下一物流搬运任务。如此循环。
28.在无障碍空间中,采取该柔性爪7夹取一个不规则的物品,该夹取装置按以下步骤来进行夹取:
29.(1)先获取夹取任务后,通过舵机2和传动轴5使其机械左臂3和机械右臂4发生相向移动,伸展成为平直状,在夹取物品时能够更加稳定。
30.(2)在夹取物品时,机械左臂3和机械右臂4慢慢靠近物品侧面,在前爪触碰到物品侧面的边缘时,使机械左臂3和机械右臂4纵向移动,使其止停板10和物品顶部相契合。在止停板10和物品顶部相契合后,机械左臂3和机械右臂4再发生横向移动,使柔性爪7和防滑器8能够发生自形变,契合物品侧面的形状,使其夹取装置在夹取物品时更加牢固、稳定。
31.(3)在柔性爪7和防滑器8将物品侧面包裹至2/3及其以上之后,机械左臂3和机械右臂4再次发生纵向移动,并以安装底座1为旋转点,由机械左臂3和机械右臂4夹取物品纵向旋转180度,使物品朝上放置在止停板10上,使其物品在运输过程中更加稳定。
32.(4)在运输到指定位置时,按照上述顺序相反操作,即可将物品安全、稳定地放置在指定位置,即完成了一次物流搬运任务。然后夹取装置恢复至最初状态再进行下一物流搬运任务。如此循环。
33.上面结合附图对本实用新型的实施加以描述,但是本实用新型不局限于上述的具体实施方式,上述的具体实施方式是示意性而不是加以局限本实用新型,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1