一种气动手动拆障机器人
本技术属于机器设计领域,具体涉及了一种气动手动拆障机器人。
背景技术:
1、随着科技的发展,机器人技术也逐步成熟,机器人逐渐进入人们的视野中。机器人具有远程控制,易于操作,体积较小的优点,且已经被应用于一些狭小的空间或者危险的区域,从事一些不便于人们工作的任务,极大的方便了生产劳动,机器人技术的应用,给人们的生产和生活带来了巨大的便利,在清除杆类两端或者被悬空的障碍物时,现在仍然采用人力清理的方式进行清理,利用机器人技术进行清障是人们关注的问题之一。现有技术中,清障机器人只能障碍上方空闲的障碍结构进行清障,无法对障碍上方具有遮挡物的障碍结构进行清障。
技术实现思路
1、本实用新型所要解决的技术问题为清障机器人无法对障碍上方具有遮挡物的障碍结构进行清障,从而提供一种气动手动拆障机器人。
2、为解决上述技术问题,本实用新型所采用的技术方案为:
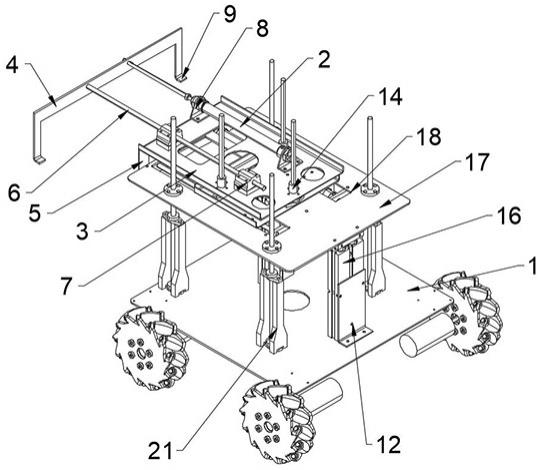
3、一种气动手动拆障机器人,包括移动小车,在移动下车的底板上设置有拆障机构,所述拆障机构包括升降组件、升降调节组件、拆障伸缩组件,所述拆障伸缩组件包括伸缩动力件、拆障伸缩安装板、夹紧板,所述伸缩动力件固定安装在拆障伸缩安装板上,伸缩动力件的动力部与夹紧板连接,拆障伸缩安装板靠近夹紧板的侧端设置有固定夹板,所述夹紧板与固定夹板之间的空间构成夹紧腔,拆障伸缩安装板底端与升降调节组件连接,升降调节组件与升降组件连接,通过伸缩动力件调节夹紧腔的大小,使夹紧板与固定夹板能够将障碍杆夹紧,通过升降调节组件和升降组件带动夹紧腔中的障碍杆进行移动,使障碍杆从障碍桩的障碍槽中取出,实现拆障。
4、作为本实用新型的一种优选方案,所述拆障伸缩组件还设置有横向限位结构,所述横向限位结构包括滑轨、滑块,所述滑块与拆障伸缩安装板固定连接,滑轨一端安装在夹紧板上,滑轨另一端与滑块连接,通过横着限位结构使拆障伸缩组件结构更加稳固,使滑轨带动夹紧板进行限位滑动,使拆障伸缩组件能够进行直线限位移动。
5、作为本实用新型的一种优选方案,所述夹紧板靠近夹紧腔的侧端底部设置有防落板,通过防落板防止夹紧腔中的障碍杆掉落。
6、作为本实用新型的一种优选方案,所述升降调节组件包括升降调节结构,所述升降调节结构包括升降调节动力件、升降调节板,所述升降调节板设置有升降孔,升降调节动力件与升降调节板连接,且升降调节动力件的升降端穿过升降孔与拆障伸缩安装板底端连接,通过升降调节动力件调节拆障伸缩结构的高度,改变夹紧腔中障碍杆在障碍槽中的位置。
7、作为本实用新型的一种优选方案,所述升降调节组件还设置有纵向限位结构,所述拆障伸缩安装板设置有升降调节孔,所述纵向限位结构包括滑轨,滑管,安装支架,滑轨通过安装支架竖直安装在升降调节板上,滑管滑动安装在滑轨上且滑管通过升降调节孔与拆障伸缩安装板固定连接,通过纵向限位结构对拆障伸缩安装板与升降调节板的连接进行加固,使拆障伸缩安装板通过滑块在滑轨上进行限位移动,使拆障伸缩组件能够纵向进行直线限位移动。
8、作为本实用新型的一种优选方案,所述升降调节组件还设置有横向调节结构,所述横向调节结构包括横向调节动力件,横向调节动力件安装在升降组件的升降板上,且横向调节动力件的设置方向与伸缩动力件的设置方向相同;横向调节动力件的移动部与升降调节板连接;通过横向调节动力件的移动部,使升降调节组件能够在升降板上进行移动。
9、作为本实用新型的一种优选方案,所述横向调节结构还设置有滑轨、滑块,所述滑轨安装在升降板上,滑块滑动安装在滑轨上且滑块与升降调节板固定连接,对升降调节组件与升降组件的连接进行加固;当横向调节动力件启动时,升降调节板通过滑块在滑轨上进行限位移动,使升降调节组件能够进行直线限位移动。
10、作为本实用新型的一种优选方案,所述升降组件包括升降动力件、升降板,升降动力件竖直安装在底板上,升降动力件的动力部与升降板连接,升降板与升降调节组件连接,所述升降板设置有让位孔,升降调节动力件穿过让位孔与升降调节板连接,通过升降动力件带动升降板进行升降,带动布障机构整体进行升降,调节夹紧腔的水平高度。
11、作为本实用新型的一种优选方案,所述升降组件还设置有固定限位结构,所述固定限位结构包括滑轨、滑管、支架安装板,所述安装支架竖直安装在底板上,滑轨竖直安装在支架安装板上,滑管滑动安装在滑轨上且滑管与升降板连接,升降动力件启动时,使升降板能够通过滑管在滑轨上进行滑动;通过支架安装板使滑轨竖直固定在底板上,使升降板进行直线限位移动。
12、作为本实用新型的一种优选方案,所述伸缩动力件为气缸;横向调节动力件为无杆气缸;升降调节动力件和升降动力件均为双轴导杆气缸,通过气缸调节夹紧腔的大小,通过无杆气缸的滑块使升降调节组件和拆障伸缩组件进行左右移动,通过双轴导杆气缸调节夹紧腔的水平高度。
13、有益效果:本实用新型通过伸缩动力件调节夹紧腔的大小控制夹紧板与固定夹板对障碍杆进行夹紧或松放,通过升降调节动力件、横向调节动力件以及升降动力件根据障碍桩中障碍槽的结构带动障碍杆进行移动,使障碍杆从障碍槽中取出,实现拆障,通过纵向限位结构、横向限位结构、横向调节结构以及固定限位结构对拆障结构进行加固,并使障碍杆进行直线限位移动。
技术特征:
1.一种气动手动拆障机器人,包括移动小车,其特征在于,在移动下车的底板(1)上设置有拆障机构,所述拆障机构包括升降组件、升降调节组件、拆障伸缩组件,所述拆障伸缩组件包括伸缩动力件(2)、拆障伸缩安装板(3)、夹紧板(4),所述伸缩动力件(2)固定安装在拆障伸缩安装板(3)上,伸缩动力件(2)的动力部与夹紧板(4)连接,拆障伸缩安装板(3)靠近夹紧板(4)的侧端设置有固定夹板(5),所述夹紧板(4)与固定夹板(5)之间的空间构成夹紧腔,拆障伸缩安装板(3)底端与升降调节组件连接,升降调节组件与升降组件连接。
2.根据权利要求1所述的一种气动手动拆障机器人,其特征在于:所述拆障伸缩组件还设置有横向限位结构,所述横向限位结构包括滑轨(6)、滑块(7),所述滑块(7)与拆障伸缩安装板(3)固定连接,滑轨(6)一端安装在夹紧板(4)上,滑轨(6)另一端与滑块(7)连接。
3.根据权利要求1所述的一种气动手动拆障机器人,其特征在于:所述夹紧板(4)靠近夹紧腔的侧端底部设置有防落板(9)。
4.根据权利要求1所述的一种气动手动拆障机器人,其特征在于:所述升降调节组件包括升降调节结构,所述升降调节结构包括升降调节动力件(10)、升降调节板(11),所述升降调节板(11)设置有升降孔(13),升降调节动力件(10)与升降调节板(11)连接,且升降调节动力件(10)的升降端穿过升降孔(13)与拆障伸缩安装板(3)底端连接。
5.根据权利要求4所述的一种气动手动拆障机器人,其特征在于:所述升降调节组件还设置有纵向限位结构,所述拆障伸缩安装板(3)设置有升降调节孔,所述纵向限位结构包括滑轨(6),滑管(14),安装支架(15),滑轨(6)通过安装支架(15)竖直安装在升降调节板(11)上,滑管(14)滑动安装在滑轨(6)上且滑管(14)通过升降调节孔与拆障伸缩安装板(3)固定连接。
6.根据权利要求5所述的一种气动手动拆障机器人,其特征在于:所述升降调节组件还设置有横向调节结构,所述横向调节结构包括横向调节动力件(19),横向调节动力件(19)安装在升降组件的升降板(17)上,且横向调节动力件(19)的设置方向与伸缩动力件(2)的设置方向相同;横向调节动力件(19)的移动部与升降调节板(11)连接。
7.根据权利要求6所述的一种气动手动拆障机器人,其特征在于:所述横向调节结构还设置有滑轨(6)、滑块(7),所述滑轨(6)安装在升降板(17)上,滑块(7)滑动安装在滑轨(6)上且滑块(7)与升降调节板(11)固定连接。
8.根据权利要求6所述的一种气动手动拆障机器人,其特征在于:所述升降组件包括升降动力件(16)、升降板(17),升降动力件(16)竖直安装在底板(1)上,升降动力件(16)的动力部与升降板(17)连接,升降板(17)与升降调节组件连接,所述升降板(17)设置有让位孔(18),升降调节动力件(10)穿过让位孔(18)与升降调节板(11)连接。
9.根据权利要求6所述的一种气动手动拆障机器人,其特征在于:所述升降组件还设置有固定限位结构,所述固定限位结构包括滑轨(6)、滑管(14)、支架安装板(21),所述安装支架(15)竖直安装在底板(1)上,滑轨(6)竖直安装在支架安装板(21)上,滑管(14)滑动安装在滑轨(6)上且滑管(14)与升降板(17)连接。
10.根据权利要求8所述的一种气动手动拆障机器人,其特征在于:所述伸缩动力件(2)为气缸;横向调节动力件(19)为无杆气缸;升降调节动力件(10)和升降动力件(16)均为双轴导杆气缸。
技术总结
本技术公开了一种气动手动拆障机器人,属于机器设计领域,包括移动小车,在移动下车的底板上设置有拆障机构,所述拆障机构包括升降组件、升降调节组件、拆障伸缩组件,所述拆障伸缩组件包括伸缩动力件、拆障伸缩安装板、夹紧板,所述伸缩动力件固定安装在拆障伸缩安装板上,伸缩动力件的动力部与夹紧板连接,拆障伸缩安装板靠近夹紧板的侧端设置有固定夹板,拆障伸缩安装板底端与升降调节组件连接,升降调节组件与升降组件连接;本技术通过伸缩动力件调节夹紧腔的大小控制夹紧板与固定夹板对障碍杆进行夹紧或松放,通过升降组件、升降调节组件以及拆障伸缩组件根据障碍槽的结构带动障碍杆移动,使障碍杆从障碍槽中取出,实现拆障。
技术研发人员:刘帅,邱钊鹏,李晖,陈春先
受保护的技术使用者:北京电子科技职业学院
技术研发日:20220713
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!