一种自动归位手臂装置和发卡机的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种自动归位手臂装置和发卡机。
背景技术:
2.在高速路上通常会设置发卡机,实际通过发卡机领取或者上交卡片。但是在司机行车的过程中,有时候会因为停车不及时,对发卡机上旋起用于阻挡的手臂造成冲击,由于手臂是刚性结构,在受到冲击后,会发生变形无法自动复位,甚至造成折断损坏。
3.因此,需要一种自动归位手臂装置和发卡机来解决上述问题。
技术实现要素:
4.本实用新型的目的在于提供一种自动归位手臂装置和发卡机,在受到汽车撞击后,能够自动复位。
5.为达此目的,本实用新型采用以下技术方案:
6.一种自动归位手臂装置,包括:
7.手臂本体,所述手臂本体包括相互转动连接的第一臂部和第二臂部,所述手臂本体能够相对发卡机在设定角度内转动;
8.复位组件,所述复位组件设置在所述第一臂部和第二臂部的转动连接处,所述复位组件能够使所述第一臂部和所述第二臂部处于第一形态;
9.所述手臂本体被配置为:当汽车与所述手臂本体碰撞后,所述第二臂部能够相对所述第一臂部转动,汽车驶离后,所述复位组件能够带动所述第二臂部恢复所述第一形态。
10.进一步地,所述第一臂部上开设有安装槽,所述第二臂部上设置有安装凸起,所述安装凸起插设在所述安装槽中,所述安装凸起能够相对所述安装槽转动。
11.进一步地,还包括驱动组件,所述驱动组件与所述第一臂部传动连接,所述驱动组件能够带动所述第一臂部在设定角度内转动。
12.进一步地,所述驱动组件包括舵机和安装架,所述舵机设置在所述安装架上,所述舵机的输出轴与所述第一臂部传动连接。
13.进一步地,所述驱动组件还包括舵盘和转轴,所述舵盘设置在所述舵机的输出轴上,所述转轴的一端与所述舵盘固定连接,所述转轴的另一端与所述第一臂部固定连接。
14.进一步地,所述转轴远离所述舵盘的一端设置有连接法兰,所述连接法兰与所述第一臂部固定连接。
15.进一步地,还包括支撑组件,所述支撑组件包括安装块,所述安装块固定设置在所述安装架上,所述安装块上设置有轴承,所述转轴穿设在所述轴承中。
16.进一步地,所述复位组件包括扭簧,所述扭簧设置在所述第一臂部和第二臂部的转动连接处,所述扭簧的一端与所述第一臂部抵接,另一端与所述第二臂部抵接。
17.进一步地,还包括复位传感器,所述复位传感器用于检测所述手臂本体相对所述发卡机的位置。
18.一种发卡机,其上设置有如上所述的自动归位手臂装置。
19.本实用新型的有益效果:
20.本实用新型所提供的一种自动归位手臂装置,包括相互转动连接的第一臂部和第二臂部,在第一臂部与第二臂部的转动连接处设置有复位组件,复位组件能够使第一臂部和第二臂部处于平直的第一形态,在汽车与手臂本体碰撞后,第二臂部能够相对第一臂部转动,汽车驶离后,复位组件能够带动第二臂部恢复第一形态。使得自动归位手臂装置能够自动复位,同时,避免与汽车刚性碰撞,对汽车形成保护。
21.本实用新型所提供的一种发卡机,其上设置有如上所述的自动归位手臂装置,自动归位手臂装置在受到汽车撞击后,能够自动复位。
附图说明
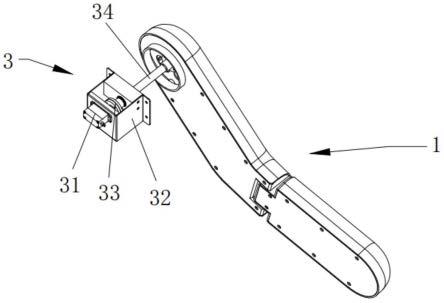
22.图1是本实用新型一种自动归位手臂装置的示意图;
23.图2是本实用新型一种自动归位手臂装置中手臂本体的示意图;
24.图3是本实用新型一种自动归位手臂装置的部分分解图。
25.图中:
26.1、手臂本体;11、第一臂部;12、第二臂部;2、扭簧;3、驱动组件;31、舵机;32、安装架;33、舵盘;34、转轴;35、安装块;36、连接法兰;4、复位传感器;41、发射端;42、遮挡端。
具体实施方式
27.下面结合附图和实施方式进一步说明本实用新型的技术方案。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部。
28.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
29.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
30.在受到汽车撞击后,为了能够使发卡机的手臂装置自动复位。如图1-图3所示,本实用新型提供一种自动归位手臂装置。自动归位手臂装置包括手臂本体1和复位组件。
31.其中,手臂本体1包括相互转动连接的第一臂部11和第二臂部12,手臂本体1能够相对发卡机在设定角度内转动;复位组件设置在第一臂部11和第二臂部12的转动连接处,复位组件能够使第一臂部11和第二臂部12处于第一形态;手臂本体1被配置为:当汽车与手臂本体1碰撞后,第二臂部12能够相对第一臂部11转动,汽车驶离后,复位组件能够带动第
二臂部12恢复第一形态,同时,避免与汽车刚性碰撞,对汽车形成保护。
32.进一步地,为了防止将汽车刮花,在第二臂部12的表面设置有缓冲层。具体地,缓冲层采用橡胶制成。
33.进一步地,第一臂部11上开设有安装槽,第二臂部12上固定设置有安装凸起,安装凸起插设在安装槽中,安装凸起能够相对安装槽转动。通过上述设置,便于第一臂部11与第二臂部12连接安装。
34.进一步地,自动归位手臂装置还包括驱动组件3,驱动组件3与第一臂部11传动连接,驱动组件3能够带动第一臂部11在设定角度内转动。通过设置驱动组件3,在没有汽车通过时,驱动组件3驱动手臂本体1放下,在有汽车通过时,驱动手臂本体1旋起对汽车进行阻拦。
35.具体地,驱动组件3包括舵机31和安装架32,舵机31设置在安装架32上,舵机31的输出轴与第一臂部11传动连接。舵机31通过安装架32安装在发卡机上,通过控制舵机31的旋转即可控制第一臂部11的运动。而且舵机31传动精度较高,能够满足手臂本体1在设定角度内转动的需要。
36.进一步地,驱动组件3还包括舵盘33和转轴34,舵盘33设置在舵机31的输出轴上,转轴34的一端与舵盘33固定连接,转轴34的另一端与第一臂部11固定连接。通过舵盘33起到联轴器的作用,舵盘33将舵机31的输出轴与转轴34连接,实现动力输出,舵机31通过转轴34带动手臂本体1转动。
37.进一步地,转轴34远离舵盘33的一端设置有连接法兰36,连接法兰36与第一臂部11固定连接。通过设置连接法兰36,便于转轴34与第一臂部11固定连接。
38.进一步地,自动归位手臂装置还包括支撑组件,支撑组件包括安装块35,安装块35固定设置在安装架32上,安装块35上设置有轴承,转轴34穿设在轴承中。通过设置支撑组件,一方面,能够对转轴34进行支撑,防止转轴34弯曲;另一方面,能够保证转轴34进行流畅的转动。
39.进一步地,复位组件包括扭簧2,扭簧2设置在第一臂部11和第二臂部12的转动连接处,扭簧2的一端与第一臂部11抵接,另一端与第二臂部12抵接。在第二臂部12相对第一臂部11转动后,扭簧2发生弹性变形进行蓄力,扭簧2在自身回复力的作用下,带动第二臂部12相对第一臂部11进行复位,手臂本体1恢复到平直的第一状态。
40.进一步地,自动归位手臂装置还包括复位传感器4,复位传感器4用于检测手臂本体1相对发卡机的位置。在本实施例中,复位传感器4为槽型光电传感器,光电传感器的发射端41固定设置在安装架32上,遮挡端42固定设置在舵盘33上,当手臂本体1由阻拦汽车的状态变为不阻拦状态时,遮挡端42位于发射端41中,将光信号遮挡,此时,槽型光电传感器控制舵机31停转,手臂本体1相对发卡机复位。在其他实施例中,也可以采用碰触开关或者接触传感器对手臂本体1相对发卡机的位置进行监测,在此不做过多限制。
41.本实施例还提供了一种发卡机,其上设置有如上的自动归位手臂装置,自动归位手臂装置在受到汽车撞击后,能够自动复位。
42.显然,本实用新型的上述实施例仅仅是为了清楚说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以
穷举。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1