一种隧道机器人的制作方法
1.本实用新型属于机器人技术领域,尤其涉及一种隧道机器人。
背景技术:
2.隧道是埋置于地层内的工程建筑物,是人类利用地下空间的一种形式。隧道可分为交通隧道、水工隧道、市政隧道、矿山隧道、军事隧道。在较大的隧道发生事故后,可采用救援车进入其中进行救援,但是等待救援车的到达时间较长,事故的发生常常伴随着起火爆炸等,所以第一时间的对现场勘查以及警戒就尤为重要,可以第一时间了解事故情况,救援人员就需要徒步进入其中,不能快速的实施救援,也不能清楚的知道隧道二次伤害存在风险,救援的开展就不能很好的实施,就会大大延误营救,对人员生命造成危害。
3.另外,在出现事故或在维护人员对隧道进行维护的过程中需要在隧道内设置警示装置以保证待救援人员的安全以及维护人员的施工安全,现有技术中通常是人工安放警示装置,但是出现事故时隧道存在二次伤害风险,人工安放也容易由于人员惫懒出现安放距离不够或安防偏差等问题。
4.由此可见,现有技术的诸多弊端,有待于进一步地改进和提高。
技术实现要素:
5.本实用新型提供了一种隧道机器人,以解决上述技术问题的至少一个技术问题。
6.本实用新型所采用的技术方案为:
7.本实用新型提供了一种隧道机器人,包括与隧道壁相连接的充电座以及本体,所述本体包括控制组件、行走机构、容纳箱以及检测组件;所述容纳箱设置在所述行走机构的上部,所述行走机构用于承载所述容纳箱并带动所述容纳箱移动;还包括放置机械臂,所述放置机械臂与所述行走机构相连接,所述容纳箱内放有三角架以及连接有警戒线的锥筒标,所述放置机械臂能够将所述三角架以及所述锥筒标从所述容纳箱内取出并放置在隧道内的车道上。
8.作为本技术的一种优选实施方式,所述行走机构包括底盘,所述容纳箱以及所述放置机械臂设置在所述底盘的上部。
9.作为本技术的一种优选实施方式,所述放置机械臂的下部具有旋转底座,所述旋转底座与所述底盘相连接,所述放置机械臂能够在所述旋转底座的带动下绕竖直轴线相对所述底盘旋转;所述放置机械臂的工作前端设置有安装部,所述安装部连接有抓手且所述抓手能够沿竖直方向相对所述安装部移动。
10.作为本技术的一种优选实施方式,所述容纳箱还具有滑动门;所述滑动门有一组,一组滑动门设置在所述容纳箱的一侧;或者,所述滑动门有两组,所述所述滑动门相对设置在所述容纳箱的两侧。
11.作为本技术的一种优选实施方式,所述底盘的下部还包括清扫组件,所述清扫组件包括沿运动方向设置在所述底盘的底部前端的清扫件以及沿运动方向设置在所述底盘
的底部中段的收集箱。
12.作为本技术的一种优选实施方式,沿运动方向,所述底盘后端以及所述底盘的侧壁还设置有多个示廓灯。
13.作为本技术的一种优选实施方式,所述控制组件包括箱体以及设置在所述箱体内部的控制器,所述箱体的侧部还设置有操作面板以及信息显示屏。
14.作为本技术的一种优选实施方式,所述检测组件设置在所述箱体的上部,包括保护罩以及设置在所述保护罩内部的高清摄像头,所述保护罩的侧部设置有与所述高清摄像头相对应的观察视窗;所述保护罩的上部还设置有环境监测部,所述环境检测部设置有温度-烟雾传感器;且所述保护罩能够相对所述箱体转动。
15.作为本技术的一种优选实施方式,所述控制器分别与所述高清摄像头、所述温度-烟雾传感器、所述行走机构、所述放置机械臂以及所述滑动门、所述清扫组件电连接;所述所述高清摄像头、所述温度-烟雾传感器、所述行走机构、所述放置机械臂以及所述滑动门、所述清扫组件通过所述控制器联动控制;所述控制器还能够与隧道内的监控系统电连接。
16.由于采用了上述技术方案,本实用新型所取得的有益效果为:
17.1.作为本技术的一种优选实施方式,本技术中的隧道机器人能够在隧道内发生意外事故或在维护人员对隧道内部进行维护等情况时自动出动并完成三角架、锥筒标等警示装置的安放,降低人工安放的风险同时能够避免人工安放由于人员惫懒可能出现的安放距离不够或安放偏差等情况的发生。
附图说明
18.此处所说明的附图用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本技术,并不构成对本实用新型的不当限定。在附图中:
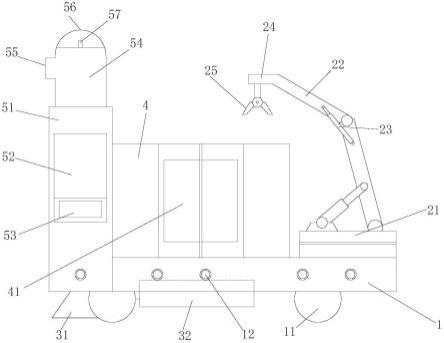
19.图1为隧道机器人的结构示意图。
20.其中,
21.1底盘,11行走轮,12示廓灯;
22.21旋转底座,22放置机械臂,23驱动缸,24安装部,25抓手;
23.31清扫件,32收集箱;
24.4容纳箱,41滑动门;
25.51箱体,52信息显示屏,53操作面板,54保护罩,55观察视窗,56环境监测部,57温度-烟雾传感器。
具体实施方式
26.为了更清楚的阐释本技术的整体构思,下面结合说明书附图以示例的方式进行详细说明。
27.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用其他不同于在此描述的其他方式来实施,因此,本实用新型的保护范围并不受下面公开的具体实施例的限制。
28.另外,在本实用新型的描述中,需要理解的是,术语“顶”、“底”、“内”、“外”、“轴
向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
29.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接,还可以是通信;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
30.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。
31.如图1所示,本实用新型提供了一种隧道机器人,包括与隧道壁相连接的充电座以及本体,本体包括控制组件、行走机构、容纳箱4以及检测组件;容纳箱4设置在行走机构的上部,行走机构用于承载容纳箱4并带动容纳箱4移动;还包括放置机械臂22,放置机械臂22与行走机构相连接,容纳箱4内放有三角架(图中未示出)以及连接有警戒线的锥筒标(图中未示出),放置机械臂22能够将三角架以及锥筒标从容纳箱4内取出并放置在隧道内的车道上。
32.本技术中的隧道机器人能够在隧道内发生意外事故或在维护人员对隧道内部进行维护等情况时自动出动并完成三角架、锥筒标等警示装置的安放,降低人工安放的风险同时能够避免人工安放由于人员惫懒可能出现的安放距离不够或安放偏差等情况的发生。
33.进一步地,参照图1所示,行走机构包括底盘1,底盘1的下部还设置有行走轮11,容纳箱4以及放置机械臂22设置在底盘1的上部,放置机械臂22的下部具有旋转底座21,旋转底座21与底盘1相连接,放置机械臂22能够在旋转底座21的带动下绕竖直轴线相对底盘1旋转;放置机械臂22由多节摆臂组成,且多节摆臂通过驱动缸23进行驱动,放置机械臂22的工作前端设置有安装部24,安装部24连接有抓手25且抓手25能够沿竖直方向相对安装部24移动。旋转底座21由旋转电机(图中未示出)带动,且旋转底座21的设置能够方便放置机械臂22实现多角度的安放,从而可以使放置机械臂22能够将三角架、锥筒标等放置于人工不便安放的位置,进而能够提升整个装置的环境适应能力。
34.作为本技术的一个优选的实施方式,参照图1所示,容纳箱4还具有滑动门41;滑动门41有一组,一组滑动门41设置在容纳箱4的一侧;或者,滑动门41有两组,滑动门41相对设置在容纳箱4的两侧。滑动门41的设置则进一步提升了放置机械臂22从容纳箱4中取放三角架、锥筒标等物品的便捷性,提高安放效率。滑动门41可以由电机带动也可以由电缸(图中未示出)或气缸(图中未示出)带动,本技术对此不做具体限定。
35.在一个示例中,继续参照图1所示,底盘1的下部还包括清扫组件,清扫组件包括沿运动方向设置在底盘1的底部前端的清扫件31以及沿运动方向设置在底盘1的底部中段的
收集箱32;沿运动方向,底盘1后端以及底盘1的侧壁还设置有多个示廓灯12。
36.进一步地,参照图1所示,控制组件包括箱体51以及设置在箱体51内部的控制器(图中未示出),箱体51的侧部还设置有操作面板53以及信息显示屏52;检测组件设置在箱体51的上部,包括保护罩54以及设置在保护罩54内部的高清摄像头,保护罩54的侧部设置有与高清摄像头(图中未示出)相对应的观察视窗55;保护罩54的上部还设置有环境监测部56,环境检测部设置有温度-烟雾传感器57;且保护罩54能够相对箱体51转动。控制器分别与高清摄像头、温度-烟雾传感器57、行走机构、放置机械臂22以及滑动门41、清扫组件电连接;高清摄像头、温度-烟雾传感器57、行走机构、放置机械臂22以及滑动门41、清扫组件通过控制器联动控制;控制器还能够与隧道内的监控系统电连接。
37.控制器连接隧道内的监控系统从而能够及时掌握隧道内的情况以方便本技术中的隧道机器人及时出动,高清摄像头配合控制器能够帮助本技术中的隧道机器人监测识别周边情况以及车道线,保证隧道机器人移动过程中的安全。且操作面板53以及信息显示屏52的设置提升人机交互性能,方便人工操作,使得本技术中的隧道机器人能够更好的配合相关人员完成运输、报警、救险等工作。
38.本实用新型中未述及的地方采用或借鉴已有技术即可实现。
39.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
40.以上所述仅为本实用新型的实施例而已,并不用于限制本实用新型。对于本领域技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本实用新型的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1