一种全封闭声屏障巡查系统的制作方法
1.本实用新型涉及一种全封闭声屏障巡查系统。
背景技术:
2.用于噪声防治的直立式声屏障受结构和材料的限制往往不能设计的很高,这就影响了它对高层建筑或特敏感区域的保护作用,为此全封闭声屏障应用而生,近10年来北京、上海、武汉、重庆、广州、宁波等城市已实施了数百公里的全封闭声屏障工程。
3.全封闭声屏障往往设置于交通繁忙的公路或连续运营的轨交高架,检修的窗口期很短,往往又是在夜间光线差里程长,人工检修强度大故障检出率低;全封闭声屏障顶部设置了大量了连接螺栓副,在道路或轻轨高架长期高频率的振动影响下,部分防松螺母失效,由于距离地面较高(一般大于6米),仅凭肉眼往往很难发现,容易造成安全隐患,国内也有多起由于螺栓松动掉落造成轨交停运的事故。为便于采光和消防安全,全封闭声屏障顶部往往采用非金属材质的透明隔声板,如亚克力板,pc耐力板,玻璃等,此类材质受温差作用影响,材料内应力释放,外部冲击等情况下会发生破裂,形成细长的裂纹,由于距离地面较高,仅凭肉眼往往很难发现这类隐患。
4.本领域缺少一种能够用于巡查全封闭声屏障隐患的全封闭声屏障巡查系统。
技术实现要素:
5.本实用新型的目的是为解决现有技术的不足,提供了所述全封闭声屏障巡查系统包括声屏障主体、铝合金环形轨道、巡查机器人,所述声屏障主体包括设置有位置信息码的待检结构,所述铝合金环形轨道设置在声屏障主体内,所述巡查机器人设置在铝合金轨道上,所述巡查机器人可以在铝合金环形轨道移动并收集待检结构的图像信息。
6.所述待检结构为声屏障主体的待检螺栓或待检非金属板。
7.所述声屏障主体包括钢架,在钢架下部安装1个或多个铝合金环形轨道。
8.所述巡查机器人将扫描生成的三维影像特征和标准图像进行对比,判别待检结构是否存在隐患,并将相应位置信息和图片进行存储。
9.所述全封闭声屏障巡查系统还包括巡查机器人工作站,所述巡查机器人工作站用于机器人内置电池充电和机器人的维护保养,所述巡查机器人工作站设置在全封闭声屏障端部。
10.巡查机器人包括:行走执行模块、设备主机、摄像头或激光雷达、翻转云台,所述行走执行模块用于实现巡查机器人在铝合金环形轨道移动,所述翻转云台用于控制摄像头或激光雷达的方向。
11.本专利具有以下有益效果:
12.1、所有流程均可实现无人操作,并可在光线充足的白天上线,不需要封闭交通或停运轨交。
13.2、机器人主体达到ip66级别以上防水标准,运行不受天气影响;主体外形不大于
200*200*200mm。
14.3、利用全封闭声屏障钢梁做为导轨支架,导轨和钢梁采用螺栓固定,导轨采用铝合金标准型材;
15.4、根据全封闭声屏障的钢梁和檩条组成的网格,设计平面坐标信息,可用二维码或条形码图片,包含网格坐标信息便于机器人识别;
16.5、机器人本体设置有一个可180
°
翻转的云台结构,使得机器人往复行进是摄像头位置和运动方向一致;
17.6、机器人摄像头部设置用高清摄像头将拍摄的实施影像存于内部存储卡用于备份存档。采用激光雷达扫描仪扫描后生成三维影像,
18.7、在声屏障端部设置一个巡查机器人工作站,用于机器人内置电池充电和巡查数据的无线传输和机器人的维护保养;
19.8、机器人工作站内置移动网络无线传输通用模块,机器人归位后,将其内部数据用gsm网络传输到指定的电脑接收端;
20.参考以下详细说明更易于理解本技术的上述以及其他特征、方面和优点。
附图说明
21.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
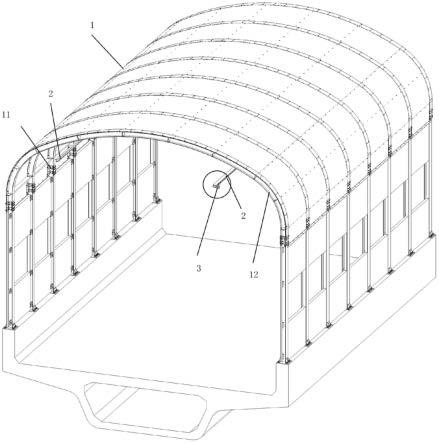
22.图1为本实用新型装置的示意图。
23.图2为机器人处的放大示意图。
24.附图标记:
25.声屏障主体1;
26.铝合金环形轨道2;
27.巡查机器人3;
28.待检结构11;钢架12;
29.行走执行模块31、设备主机32、摄像头或激光雷达33、翻转云台34。
具体实施方式
30.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例的附图,对本实用新型实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
31.除非另作定义,此处使用的技术术语或者科学术语应当为本实用新型所属领域内具有一般技能的人士所理解的通常意义。本实用新型专利申请说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。
32.如图1-2,一种全封闭声屏障巡查系统,所述全封闭声屏障巡查系统包括声屏障主
体、铝合金环形轨道、巡查机器人,所述声屏障主体包括设置有位置信息码的待检结构,所述铝合金环形轨道设置在声屏障主体内,所述巡查机器人设置在铝合金轨道上,所述巡查机器人可以在铝合金环形轨道移动并收集待检结构的图像信息。
33.所述待检结构为声屏障主体的待检螺栓或待检非金属板。
34.所述声屏障主体包括钢架,在钢架下部安装1个或多个铝合金环形轨道。
35.所述巡查机器人将扫描生成的三维影像特征和标准图像进行对比,判别待检结构是否存在隐患,并将相应位置信息和图片进行存储。
36.所述全封闭声屏障巡查系统还包括巡查机器人工作站,所述巡查机器人工作站用于机器人内置电池充电和机器人的维护保养,所述巡查机器人工作站设置在全封闭声屏障端部。
37.如图1,巡查机器人包括:行走执行模块、设备主机、摄像头或激光雷达、翻转云台,所述行走执行模块用于实现巡查机器人在铝合金环形轨道移动,所述翻转云台用于控制摄像头或激光雷达的方向。
38.本专利利用全封闭声屏障钢架,在钢架下部安装1个或多个铝合金环形轨道;在全封闭檩条或钢梁相应位置标识位置信息码,可用二维码或条形码图片,包含网格坐标信息便于机器人识别。专用巡查机器人安装于铝合金轨道上,可沿轨道自主往复运动,机器人可采用橡胶轮胎或齿条结构。机器人主体前段设置有一组高清摄像头将拍摄的实时影像存于内部存储卡用于备份存档。前段有一组激光雷达扫描仪,将扫描的结果自动生成三维影像;激光雷达扫描仪有效扫描距离0~5米,分辨率》=0.1mm,扫描频率》=10hz,测距采样率》=4k。内内置ai智能识别软件,将扫描生产的三维影像特征和标准图像进行对比,判别螺栓副是否存在隐患,非金属板是否存在裂纹,并将相应位置信息和图片进行存储;在声屏障端部设置一个巡查机器人工作站,用于机器人内置电池充电和机器人的维护保养;机器人工作站内置移动网络无线传输通用模块,机器人归位后,将其内部数据用gsm网络传输到指定的电脑接收端;无线机器人采用定期自主巡查,也可由电脑端远程指令巡查。
39.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
40.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这中叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1