一种带远程控制的水上救援机器人的制作方法
1.本实用新型涉及水上救援技术领域,尤其涉及一种带远程控制的水上救援机器人。
背景技术:
2.水上救援机器人,适用于对水域上遇险、落水人员进行救援工作。当救援机器人在执行救援任务的过程中,会从任意水域触发,再行进到特定水域执行任务。在现有技术中,救援机器人的行进一般是通过遥控的方式进行控制的。这种方式一般都是在发现有人落水之后,将救援机器人抛到水中,通过遥控的方式控制救援机器人移动至落水者旁边实施救援。这种方式需要耗费一定的时间进行准备,容易错失救援时机。
3.因此,现有技术存在缺陷,需要改进。
技术实现要素:
4.本实用新型的目的是克服现有技术的不足,提供一种带远程控制的水上救援机器人。
5.本实用新型的技术方案如下:提供一种带远程控制的水上救援机器人,包括:救援机器人主体、设置于所述救援机器人主体内的主控系统、以及设置于所述救援机器人主体上的若干推进器,所述主控系统包括:主mcu模块、控制模块、飞控系统、gps模块以及4g透传dtu模块,所述主mcu模块与控制模块连接,所述主mcu模块连接有飞控接口,所述主mcu模块通过飞控接口与飞控系统连接,所述飞控系统与gps模块以及4g透传dtu模块连接,所述4g透传dtu模块远程连接有控制平台。
6.进一步地,所述主控系统连接有电源模块,所述电源模块包括:mcu供电电路、飞控供电电路以及核心板供电电路,所述mcu供电电路与主mcu模块连接,所述飞控供电电路与飞控系统连接,所述核心板供电电路与4g透传dtu模块连接。
7.进一步地,所述4g透传dtu模块连接有esd保护电路,所述esd保护电路包括瞬态抑制二极管d1、瞬态抑制二极管d2、瞬态抑制二极管d3以及瞬态抑制二极管d4,所述瞬态抑制二极管d1与4g透传dtu模块的第8引脚连接,所述瞬态抑制二极管d2与4g透传dtu模块的第9引脚连接,所述瞬态抑制二极管d3与4g透传dtu模块的第10引脚连接,所述瞬态抑制二极管d4与4g透传dtu模块的第11引脚连接。
8.进一步地,所述主mcu模块连接有左电调接口以及右电调接口,所述左电调接口与右电调接口分别连接有电子调速器,所述电子调速器分别与推进器连接。
9.进一步地,本实用新型还包括遥控器,所述遥控器与控制模块无线连接。
10.采用上述方案,本实用新型通过4g透传dtu模块与控制平台进行远程连接,从而通过控制平台直接对救援机器人的目标地点与行进方向进行控制,以此保证在接收到救援信息的时候,迅速驱使救援机器人前往落水者的所在位置实施救援,为救援工作争取黄金时间,提高救援效率以及救援成功率。
附图说明
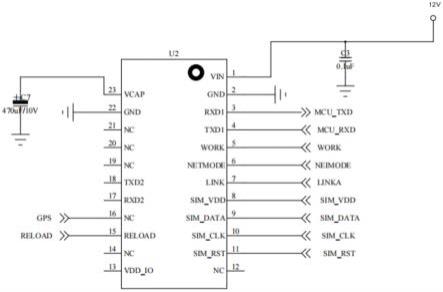
11.图1为主mcu模块的电路连接示意图。
12.图2为4g透传dtu模块的电路连接示意图。
13.图3为mcu供电电路的电路连接示意图。
14.图4为飞控供电电路的电路连接示意图。
15.图5为核心板供电电路的电路连接示意图。
16.图6为esd保护电路的电路连接示意图。
具体实施方式
17.以下结合附图和具体实施例,对本实用新型进行详细说明。
18.请参阅图1、图2,本实用新型提供一种带远程控制的水上救援机器人,包括:救援机器人主体、设置于所述救援机器人主体内的主控系统、以及设置于所述救援机器人主体上的若干推进器。所述主控系统包括:主mcu模块、控制模块、飞控系统、gps模块以及4g透传dtu模块。所述主mcu模块与控制模块连接。所述主mcu模块连接有飞控接口,所述主mcu模块通过飞控接口与飞控系统连接。所述飞控系统与gps模块以及4g透传dtu模块连接。所述4g透传dtu模块远程连接有控制平台。
19.4g透传dtu模块是一种广泛应用于工业物联网数据传输的终端设备,可利用td-lte或fdd-lte的4g网络实现无线长距离数据传输,与远程公网服务器进行数据交互,主要用户远程数据采集和远程控制项目。
20.通过4g透传dtu模块与控制平台连接,并在控制平台上添加、登录救援机器人,从而进行连接绑定。完成绑定后,将救援机器人放置于水中,并使得救援机器人进入休眠状态。通过控制平台可以查看救援机器人当前状态、电量等,同时可以唤醒救援机器人,并对救援机器人的行进路程进行规划。当出现有人落水的情况时,控制平台接收到救援信息,向服务器发送控制指令,唤醒救援机器人,并通过4g透传dtu模块将控制命令转发到救援机器人的飞控系统上。救援机器人收到命令后,通过gps模块进行导航,自动根据命令中所包含的位置信息移动至落水者的所在位置处进行救援。
21.在控制平台上可以添加多台救援机器人,从而方便集中管理以及调度。
22.请参阅图3至图5,所述主控系统连接有电源模块,所述电源模块包括:mcu供电电路、飞控供电电路以及核心板供电电路。所述mcu供电电路与主mcu模块连接,所述飞控供电电路与飞控系统连接,所述核心板供电电路与4g透传dtu模块连接。通过电源模块为各模块、电路提供工作所需要的电能,以保证救援机器人的正常工作状态。
23.请参阅图6,所述4g透传dtu模块连接有esd保护电路。所述esd保护电路包括瞬态抑制二极管d1、瞬态抑制二极管d2、瞬态抑制二极管d3以及瞬态抑制二极管d4。所述瞬态抑制二极管d1与4g透传dtu模块的第8引脚连接。所述瞬态抑制二极管d2与4g透传dtu模块的第9引脚连接。所述瞬态抑制二极管d3与4g透传dtu模块的第10引脚连接。所述瞬态抑制二极管d4与4g透传dtu模块的第11引脚连接。4g透传dtu模块中需要安装sim卡才能保证正常的工作状态。通过设置esd保护电路,从而保护sim卡拔插防静电,避免sim卡在拔插过程中找到静电的影响或损害。
24.所述主mcu模块连接有左电调接口以及右电调接口。所述左电调接口与右电调接
口分别连接有电子调速器。所述电子调速器分别与推进器连接。通过设置电子调速器,从而对推进器的工作状态、转速等进行控制,以此通过改变两侧推进器的转速,实现救援机器人的加速、转速、转向以及后退等移动状态的控制,提高救援机器人的行进能力。
25.本实用新型还包括遥控器,所述遥控器与控制模块无线连接。通过遥控器可以直接对救援机器人的行进路线进行控制,提供多种控制方式,以便于在突发情况且无法与控制平台进行连接通信时,可以通过遥控器实现救援工作。
26.综上所述,本实用新型通过4g透传dtu模块与控制平台进行远程连接,从而通过控制平台直接对救援机器人的目标地点与行进方向进行控制,以此保证在接收到救援信息的时候,迅速驱使救援机器人前往落水者的所在位置实施救援,为救援工作争取黄金时间,提高救援效率以及救援成功率。
27.以上仅为本实用新型的较佳实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种带远程控制的水上救援机器人,其特征在于,包括:救援机器人主体、设置于所述救援机器人主体内的主控系统、以及设置于所述救援机器人主体上的若干推进器,所述主控系统包括:主mcu模块、控制模块、飞控系统、gps模块以及4g透传dtu模块,所述主mcu模块与控制模块连接,所述主mcu模块连接有飞控接口,所述主mcu模块通过飞控接口与飞控系统连接,所述飞控系统与gps模块以及4g透传dtu模块连接,所述4g透传dtu模块远程连接有控制平台。2.根据权利要求1所述的带远程控制的水上救援机器人,其特征在于,所述主控系统连接有电源模块,所述电源模块包括:mcu供电电路、飞控供电电路以及核心板供电电路,所述mcu供电电路与主mcu模块连接,所述飞控供电电路与飞控系统连接,所述核心板供电电路与4g透传dtu模块连接。3.根据权利要求1所述的带远程控制的水上救援机器人,其特征在于,所述4g透传dtu模块连接有esd保护电路,所述esd保护电路包括瞬态抑制二极管d1、瞬态抑制二极管d2、瞬态抑制二极管d3以及瞬态抑制二极管d4,所述瞬态抑制二极管d1与4g透传dtu模块的第8引脚连接,所述瞬态抑制二极管d2与4g透传dtu模块的第9引脚连接,所述瞬态抑制二极管d3与4g透传dtu模块的第10引脚连接,所述瞬态抑制二极管d4与4g透传dtu模块的第11引脚连接。4.根据权利要求1所述的带远程控制的水上救援机器人,其特征在于,所述主mcu模块连接有左电调接口以及右电调接口,所述左电调接口与右电调接口分别连接有电子调速器,所述电子调速器分别与推进器连接。5.根据权利要求1所述的带远程控制的水上救援机器人,其特征在于,还包括遥控器,所述遥控器与控制模块无线连接。
技术总结
本实用新型公开一种带远程控制的水上救援机器人,包括:救援机器人主体、主控系统、以及若干推进器,主控系统包括:主MCU模块、控制模块、飞控系统、GPS模块以及4G透传DTU模块,主MCU模块与控制模块连接,所述主MCU模块连接有飞控接口,主MCU模块通过飞控接口与飞控系统连接,飞控系统与GPS模块以及4G透传DTU模块连接,4G透传DTU模块远程连接有控制平台。本实用新型通过4G透传DTU模块与控制平台进行远程连接,从而通过控制平台直接对救援机器人的目标地点与行进方向进行控制,以此保证在接收到救援信息的时候,迅速驱使救援机器人前往落水者的所在位置实施救援,为救援工作争取黄金时间,提高救援效率以及救援成功率。提高救援效率以及救援成功率。提高救援效率以及救援成功率。
技术研发人员:杜永计 彭雄辉
受保护的技术使用者:深圳市智璟科技有限公司
技术研发日:2022.07.22
技术公布日:2022/12/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1