一种视觉抓取机器人用夹具
本技术涉及视觉抓取机器人应用,尤其涉及一种视觉抓取机器人用夹具。
背景技术:
1、视觉抓取机器人是指通过视觉传感器获取环境的二维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置来完成抓取的一种机器人,这种机器人的视觉硬件主要包括图像获取和视觉处理两部分,而图像获取由照明系统、视觉传感器、模拟-数字转换器和帧存储器等组成。
2、而在现有技术中,传统的视觉抓取机器人所使用的夹具操控方式较为复杂,需要专业的人员进行操作,大大提高了技术难度,从而降低了物料夹取的效率,为此,我们提出了一种视觉抓取机器人用夹具来解决上述问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,如:传统视觉抓取机器人的夹具操作较为复杂,大大降低了物料夹取的效率,而提出的一种视觉抓取机器人用夹具。
2、为了实现上述目的,本实用新型采用了如下技术方案:
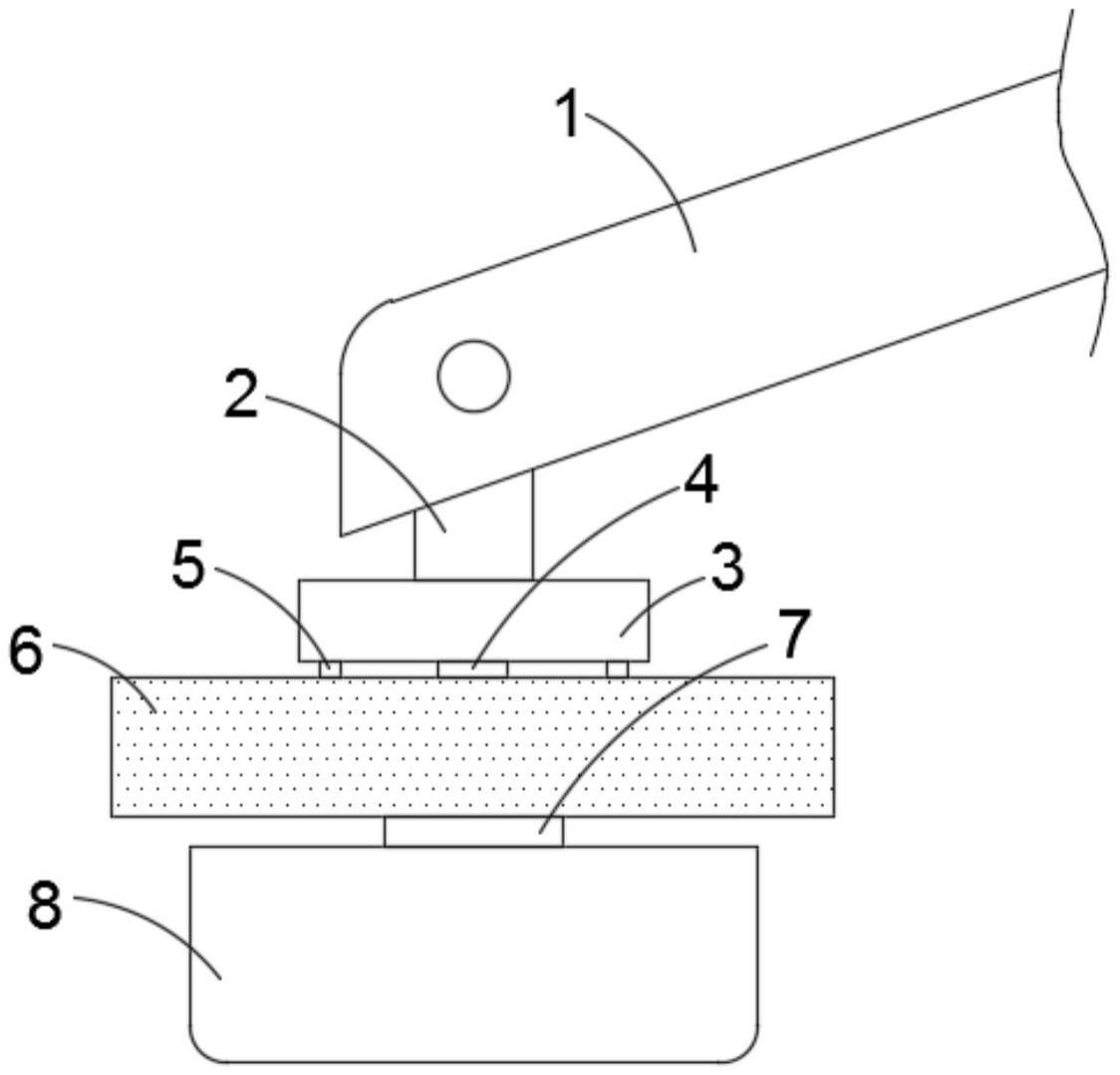
3、一种视觉抓取机器人用夹具,包括设置在机械臂上的顶板,所述机械臂的一端连接设置有连杆,所述连杆远离机械臂的一端固定设置有电机,所述电机通过连接块与顶板相连接,所述顶板的下壁设置有物料夹持机构。
4、优选地,所述物料夹持击鼓包括两个夹持板,两个所述夹持板均通过滑板滑动设置在顶板的下壁上,所述顶板的下壁对称开设有两个与滑板对应的滑槽,两个所述滑槽内均设有与夹持板对应的控制机构。
5、优选地,所述控制机构包括两个螺纹杆,两个所述螺纹杆分别转动设置在两个滑槽内,且两个所述螺纹杆分别转动贯穿两个滑板设置,两个所述滑板上均开设有与螺纹杆对应的螺纹通孔,所述顶板上还设有与螺纹杆对应的传动机构。
6、优选地,所述传动机构包括斜齿轮,所述顶板的下壁还开设有传动槽,所述电机的输出端固定连接设置有转杆,所述转杆转动贯穿顶板延伸至传动槽内设置,所述斜齿轮转动设置在传动槽内,且所述斜齿轮固定套设在转杆上,所述传动槽开设在两个滑槽之间设置,两个所述螺纹杆相互靠近的一端均转动贯穿滑槽的侧壁延伸至传动槽内设置,且两个所述螺纹杆延伸至传动槽的一端均固定套设有传动齿轮,两个所述传动齿轮均与斜齿轮啮合设置。
7、优选地,两个所述夹持板相互靠近的一侧侧壁上均设置有防滑纹。
8、与现有技术相比,本实用新型的有益效果是:通过电机与转杆的配合,实现了对斜齿轮转动的控制,通过斜齿轮与传动齿轮的配合,在电机带动斜齿轮转动时即可带动传动齿轮转动,从而可以带动螺纹杆转动,通过螺纹杆与滑板的配合,在螺纹杆转动时即可带动滑板滑动,从而带动夹持板进行滑动,通过反向设置两个螺纹杆即可控制两个夹持板靠拢或远离,从而可以快速完成夹持,通过控制电机的开关与正反转即可完成物料的夹持放松,操作简单,大大提高了物料夹持的效率,通过设置防滑纹,提高了夹持板上的摩擦力,有效的避免出现物料滑动松脱的问题,保证物料的夹持稳定性。
技术特征:
1.一种视觉抓取机器人用夹具,包括设置在机械臂(1)上的顶板(6),其特征在于,所述机械臂(1)的一端连接设置有连杆(2),所述连杆(2)远离机械臂(1)的一端固定设置有电机(3),所述电机(3)通过连接块(5)与顶板(6)相连接,所述顶板(6)的下壁设置有物料夹持机构。
2.根据权利要求1所述的一种视觉抓取机器人用夹具,其特征在于,所述物料夹持击鼓包括两个夹持板(8),两个所述夹持板(8)均通过滑板(7)滑动设置在顶板(6)的下壁上,所述顶板(6)的下壁对称开设有两个与滑板(7)对应的滑槽(9),两个所述滑槽(9)内均设有与夹持板(8)对应的控制机构。
3.根据权利要求2所述的一种视觉抓取机器人用夹具,其特征在于,所述控制机构包括两个螺纹杆(10),两个所述螺纹杆(10)分别转动设置在两个滑槽(9)内,且两个所述螺纹杆(10)分别转动贯穿两个滑板(7)设置,两个所述滑板(7)上均开设有与螺纹杆(10)对应的螺纹通孔,所述顶板(6)上还设有与螺纹杆(10)对应的传动机构。
4.根据权利要求3所述的一种视觉抓取机器人用夹具,其特征在于,所述传动机构包括斜齿轮(12),所述顶板(6)的下壁还开设有传动槽(11),所述电机(3)的输出端固定连接设置有转杆(4),所述转杆(4)转动贯穿顶板(6)延伸至传动槽(11)内设置,所述斜齿轮(12)转动设置在传动槽(11)内,且所述斜齿轮(12)固定套设在转杆(4)上,所述传动槽(11)开设在两个滑槽(9)之间设置,两个所述螺纹杆(10)相互靠近的一端均转动贯穿滑槽(9)的侧壁延伸至传动槽(11)内设置,且两个所述螺纹杆(10)延伸至传动槽(11)的一端均固定套设有传动齿轮(13),两个所述传动齿轮(13)均与斜齿轮(12)啮合设置。
5.根据权利要求2所述的一种视觉抓取机器人用夹具,其特征在于,两个所述夹持板(8)相互靠近的一侧侧壁上均设置有防滑纹。
技术总结
本技术公开了一种视觉抓取机器人用夹具,包括设置在机械臂上的顶板,所述机械臂的一端连接设置有连杆,所述连杆远离机械臂的一端固定设置有电机,所述电机通过连接块与顶板相连接,所述顶板的下壁设置有物料夹持机构。本技术能够通过控制电机开启关闭已经正反转来控制夹具开合工作,操作简单,大大提高了机械臂夹持物料的效率。
技术研发人员:刘嫣然,郑嘉熙,谢碧彦,孟昭辰,苏静钰,金添,黄子豪
受保护的技术使用者:大连海事大学
技术研发日:20220727
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!