一种转运机器人的制作方法
本技术涉及生产运输,具体涉及一种转运机器人。
背景技术:
1、在工业生产中,经常使用到治具,在具体生产时,将工件放置在治具上进行加工,比如进行阳极氧化处理等。当需要将工件固定在治具中进行加工时,在加工前需要对治具进行装配锁紧以使得工件能够固定在治具中。在加工完成后需要对治具进行解锁以将加工完成的工件从治具中取出,随后需通过转运机器人进行转运。
2、机器人是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。目前工业中最常用的就是机械臂了,通过机械臂抓取物品,快速安全和高效,同时给机械臂配合履带式行走机构,实现转运工作。
3、但是目前的转运机器人,多为采用吸盘结构来抓取工件,结构单一,因而有必要针对这类转运机器人的结构进行研究和改进;为了解决上述问题,故提出本申请的构思。
技术实现思路
1、本实用新型的目的是提供一种转运机器人,以解决现有技术存在的上述缺陷中的至少一种。
2、为实现上述目的,本实用新型提供了如下技术方案:一种转运机器人,包括:
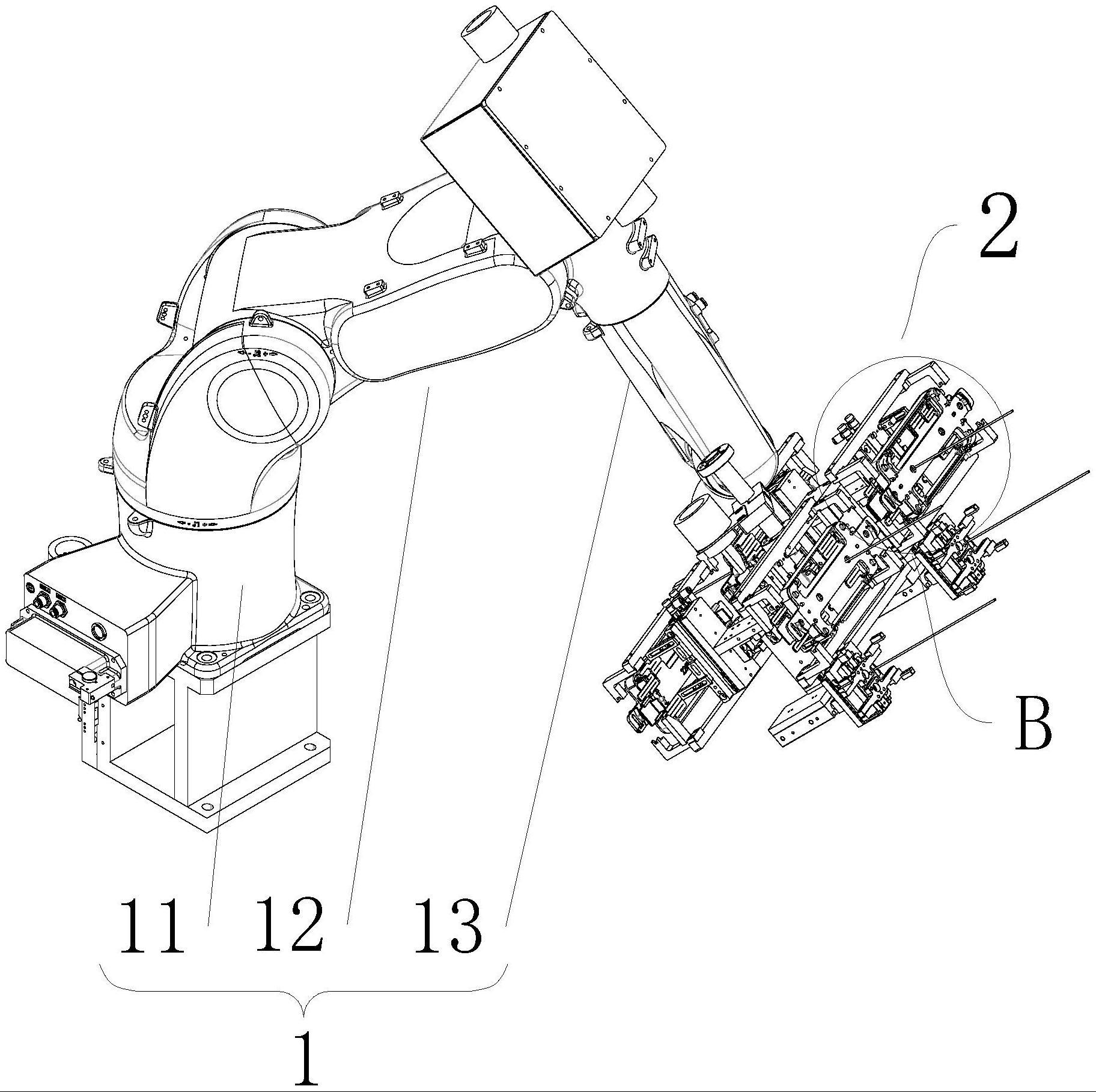
3、摆动机构,所述摆动机构包括旋转底座,以及与所述旋转底座转动连接的机械臂,以及与所述机械臂连接且位于远离所述旋转底座一端的动力部;
4、抓手结构,所述抓手结构包括:
5、基座,所述基座用于与所述抓手结构的动力部连接;
6、至少两个夹持结构,各所述夹持结构分别布置于所述基座的两侧;
7、驱动结构,所述驱动结构布置于所述夹持结构与所述基座之间,且用于驱动所述夹持结构夹紧工件;
8、其中,所述夹持结构包括第一夹持件及与所述第一夹持件相对应布置的第二夹持件,且所述第一夹持件和所述第二夹持件之间形成有用于夹紧工件的夹持区;
9、所述驱动结构包括第一驱动组件和第二驱动组件,所述第一驱动组件和第二驱动组件分别带动所述第一夹持件和所述第二夹持件朝夹持区方向直线运动以夹紧所述工件。
10、本实用新型的进一步改进,所述第一驱动组件和所述第二驱动组件分别具有滑轨、与所述滑轨滑动连接的滑块以及驱动所述滑块直线运动的动力件;
11、所述第一驱动组件的滑块与所述第二驱动组件的滑块分别与所述第一夹持件和所述第二夹持件固定。
12、本实用新型的进一步改进,所述滑轨固定在所述基座的侧端。
13、本实用新型的进一步改进,第一夹持件及与所述第二夹持件均包括:
14、夹体以及布置在所述夹体两端的夹爪部,
15、所述第一夹持件的夹爪部与所述第二夹持件的夹爪部呈相对布置。
16、本实用新型的进一步改进,所述夹爪部呈l形状。
17、本实用新型的进一步改进,所述夹爪部的一端具有与所述夹体连接的连接部,另一端具有卡槽。
18、本实用新型的进一步改进,所述机械臂包括依次连接的第一连接臂、第二连接臂以及第三连接臂,所述第一连接臂相对所述旋转底座水平转动,所述第二连接臂相对所述第一连接臂纵向转动,所述第三连接臂的一端相对所述第二连接臂纵向转动,另一端相对所述动力部水平转动。
19、与现有技术相比,本实用新型至少具有以下有益效果:
20、该种转运机器人,包括:摆动机构,所述摆动机构包括旋转底座,以及与所述旋转底座转动连接的机械臂,以及与所述机械臂连接且位于远离所述旋转底座一端的动力部;抓手结构,所述抓手结构包括:基座,所述基座用于与所述抓手结构的动力部连接;至少两个夹持结构,各所述夹持结构分别布置于所述基座的两侧;驱动结构,所述驱动结构布置于所述夹持结构与所述基座之间,且用于驱动所述夹持结构夹紧工件;其中,所述夹持结构包括第一夹持件及与所述第一夹持件相对应布置的第二夹持件,且所述第一夹持件和所述第二夹持件之间形成有用于夹紧工件的夹持区;所述驱动结构包括第一驱动组件和第二驱动组件,所述第一驱动组件和第二驱动组件分别带动所述第一夹持件和所述第二夹持件朝夹持区方向直线运动以夹紧所述工件;通过上巧妙的组合在一起,具有结构紧凑、操作简单的特性,实用价值高,从而有利于自动化生产线的使用。
21、下面结合说明书附图和具体实施例对本实用新型作进一步说明。
技术特征:
1.一种转运机器人,其特征在于,包括:
2.根据权利要求1所述的一种转运机器人,其特征在于:所述第一驱动组件和所述第二驱动组件分别具有滑轨、与所述滑轨滑动连接的滑块以及驱动所述滑块直线运动的动力件;
3.根据权利要求2所述的一种转运机器人,其特征在于:所述滑轨固定在所述基座的侧端。
4.根据权利要求1所述的一种转运机器人,其特征在于:第一夹持件及与所述第二夹持件均包括:
5.根据权利要求4所述的一种转运机器人,其特征在于:所述夹爪部呈l形状。
6.根据权利要求4所述的一种转运机器人,其特征在于:所述夹爪部的一端具有与所述夹体连接的连接部,另一端具有卡槽。
7.根据权利要求1所述的一种转运机器人,其特征在于:所述机械臂包括依次连接的第一连接臂、第二连接臂以及第三连接臂,所述第一连接臂相对所述旋转底座水平转动,所述第二连接臂相对所述第一连接臂纵向转动,所述第三连接臂的一端相对所述第二连接臂纵向转动,另一端相对所述动力部水平转动。
技术总结
本技术涉及生产运输技术领域,具体涉及一种转运机器人,包括摆动机构,摆动机构包括旋转底座以及与旋转底座转动连接的机械臂以及与机械臂连接且位于远离旋转底座一端的动力部;抓手结构包括基座,基座用于与抓手结构的动力部连接;至少两个夹持结构,各夹持结构分别布置于基座的两侧;驱动结构布置于夹持结构与基座之间,用于驱动夹持结构夹紧工件;夹持结构包括第一夹持件及与第一夹持件相对应布置的第二夹持件,第一夹持件和第二夹持件之间形成有用于夹紧工件的夹持区;驱动结构包括第一驱动组件和第二驱动组件,第一驱动组件和第二驱动组件分别带动第一夹持件和第二夹持件朝夹持区方向直线运动以夹紧工件;具有结构紧凑、操作简单的特性。
技术研发人员:李立进,郭坤龙,温添宇
受保护的技术使用者:深圳市联合东创科技有限公司
技术研发日:20220727
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!