一种人工智能机器人减震装置
1.本实用新型涉及机器人减震领域,特别的涉及一种人工智能机器人减震装置。
背景技术:
2.智能机器人的地面运动往往受运动路况限制,当机器人在崎岖地面运动时,车体容易产生颠簸,甚至侧翻,严重时,可能会导致内部精密元件损坏,在现有技术中,对机器人的减震方式普遍采用减震弹簧或者液压减震装置的方式来达到减震效果,该种方式在机器人震动受力时,容易因弹簧的特性出现晃动,导致机器人站立不稳的情况出现。
3.因此,提出一种人工智能机器人减震装置以解决上述问题。
技术实现要素:
4.本实用新型通过以下技术方案来实现上述目的,一种人工智能机器人减震装置,包括:机器人底座;减震限位机构,用于对机器人底座进行减震的减震限位机构安装于机器人底座的底部;其中,所述减震限位机构包括减震组件,用于对机器人底座进行减震的减震组件设置于机器人底座的底部,所述减震限位机构还包括限位组件,用于对机器人底座的下降位置进行限位的限位组件设置于机器人底座底部的两侧。
5.优选的,所述减震组件包括设置于机器人底座底部的底板,所述底板顶部的前后两侧均安装有活塞筒,所述活塞筒的内腔滑动安装有第一活塞板,所述活塞筒的顶部贯穿安装有支杆,且支杆的底部与第一活塞板的顶部固定连接,所述支杆位于活塞筒内腔的表面套设有减震弹簧,所述支杆位于活塞筒外部的一端固定连接有顶板,所述顶板的两侧均通过转轴转动连接有辅助撑板,所述顶板的顶部与机器人底座的底部固定连接,能够在机器人底座受力时进行减震限位,改变了传统通过弹簧减震出现晃动,影响机器人站立的情况出现。
6.优选的,两个所述活塞筒相邻一侧的底部连通有第一连管,所述第一连管远离活塞筒的一端连通有三通管,所述三通管的一侧连通有第二连管,能够在支杆与第一活塞板下降产生负压时,将压力传输至限位组件的内腔进行限位的目的。
7.优选的,所述限位组件包括两个安装于底板顶部两侧的箱体,所述箱体一侧的底部与第二连管连通,所述箱体的内腔滑动安装有第二活塞板,所述第二活塞板的顶部固定连接有支板,所述支板的顶部贯穿箱体并延伸至箱体的外部,所述支板的顶部固定连接有橡胶垫,能够与减震组件相配合将橡胶垫顶起,对机器人底座的下降进行限位的目的。
8.优选的,所述底板的顶部且位于箱体的前后两侧均安装有缓冲弹簧,所述缓冲弹簧的顶端与机器人底座的底部固定连接,能够对机器人底座进行弹性支撑,减小震动力的效果。
9.优选的,还包括拉伸机构,所述拉伸机构包括安装于底板顶部两侧的支架,所述支架的表面套设有支撑滚筒,所述支撑滚筒的顶部与辅助撑板的底部接触,所述支架的一侧固定连接有安装板,所述安装板远离支架的一侧固定连接有拉伸弹簧,所述拉伸弹簧远离
安装板的一端固定连接有卡板,所述卡板与辅助撑板的表面接触,能够在辅助撑板受力翘起时进行限位,起到辅助减震的效果。
10.本实用新型的有益效果是:
11.1、通过设置减震限位机构,在机器人底座受力时,带动支杆向下移动,支杆带动第一活塞板在活塞筒的内腔活塞运动产生负压,将压力通过第一连管传输至三通管与第二连管的内腔,再通过第二连管与箱体的连通将压力传输至箱体的内腔,底板的内腔产生负压,对第二活塞板与支板顶起,使橡胶垫与机器人底座的底部接触,对机器人底座进行限位,起到了能够在机器人颠簸震动时进行减震,且通过活塞运动保持机器人底座在受力时进行上下运动,避免出现左右晃动,影响机器人站立的情况出现;
12.2、通过设置拉伸机构,在顶板受力下降带动辅助撑板翘起时,辅助撑板带动卡板向外延伸,卡板带动拉伸弹簧进行拉伸,通过拉伸弹簧的拉伸性能,在拉伸弹簧拉伸到极限时对辅助撑板进行限位,起到了在辅助撑板向外扩张时进行限位,用于对机器人底座辅助减震的效果。
附图说明
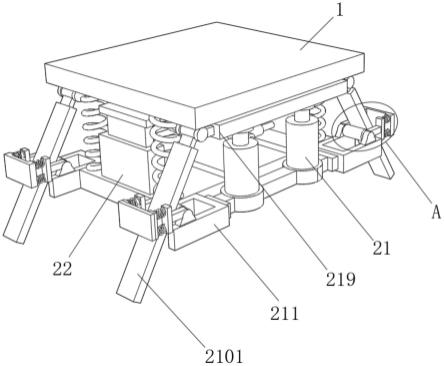
13.图1为本实用新型的结构示意图;
14.图2为本实用新型减震组件的局部结构示意图;
15.图3为本实用新型箱体的截面结构示意图;
16.图4为图1中a区的放大图。
17.图中:1、机器人底座;2、减震限位机构;21、减震组件;211、底板;212、活塞筒;213、第一活塞板;214、支杆;215、减震弹簧;216、第一连管;217、三通管;218、第二连管;219、顶板;2101、辅助撑板;22、限位组件;221、箱体;222、第二活塞板;223、支板;224、橡胶垫;225、缓冲弹簧;3、拉伸机构;31、支架;32、支撑滚筒;33、安装板;34、拉伸弹簧;35、卡板。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.具体实施时:如图1-4所示,一种人工智能机器人减震装置,包括:机器人底座1;减震限位机构2,用于对机器人底座1进行减震的减震限位机构2安装于机器人底座1的底部;其中,减震限位机构2包括减震组件21,用于对机器人底座1进行减震的减震组件21设置于机器人底座1的底部,减震限位机构2还包括限位组件22,用于对机器人底座1的下降位置进行限位的限位组件22设置于机器人底座1底部的两侧。
20.如图1、图2、图3和图4所示,减震组件21包括设置于机器人底座1底部的底板211,底板211顶部的前后两侧均安装有活塞筒212,活塞筒212的内腔滑动安装有第一活塞板213,活塞筒212的顶部贯穿安装有支杆214,且支杆214的底部与第一活塞板213的顶部固定连接,支杆214位于活塞筒212内腔的表面套设有减震弹簧215,支杆214位于活塞筒212外部的一端固定连接有顶板219,顶板219的两侧均通过转轴转动连接有辅助撑板2101,顶板219
的顶部与机器人底座1的底部固定连接;两个活塞筒212相邻一侧的底部连通有第一连管216,第一连管216远离活塞筒212的一端连通有三通管217,三通管217的一侧连通有第二连管218;限位组件22包括两个安装于底板211顶部两侧的箱体221,箱体221一侧的底部与第二连管218连通,箱体221的内腔滑动安装有第二活塞板222,第二活塞板222的顶部固定连接有支板223,支板223的顶部贯穿箱体221并延伸至箱体221的外部,支板223的顶部固定连接有橡胶垫224,在机器人底座1受力时,带动支杆214向下移动,支杆214带动第一活塞板213在活塞筒212的内腔活塞运动产生负压,将压力通过第一连管216传输至三通管217与第二连管218的内腔,再通过第二连管218与箱体221的连通将压力传输至箱体221的内腔,底板211的内腔产生负压,对第二活塞板222与支板223顶起,使橡胶垫224与机器人底座1的底部接触,对机器人底座1进行限位;底板211的顶部且位于箱体221的前后两侧均安装有缓冲弹簧225,缓冲弹簧225的顶端与机器人底座1的底部固定连接。
21.如图1和图4所示,还包括拉伸机构3,拉伸机构3包括安装于底板211顶部两侧的支架31,支架31的表面套设有支撑滚筒32,支撑滚筒32的顶部与辅助撑板2101的底部接触,支架31的一侧固定连接有安装板33,安装板33远离支架31的一侧固定连接有拉伸弹簧34,拉伸弹簧34远离安装板33的一端固定连接有卡板35,卡板35与辅助撑板2101的表面接触,在顶板219受力下降带动辅助撑板2101翘起时,辅助撑板2101带动卡板35向外延伸,卡板35带动拉伸弹簧34进行拉伸,通过拉伸弹簧34的拉伸性能,在拉伸弹簧34拉伸到极限时对辅助撑板2101进行限位。
22.本实用新型在机器人底座1受力时,带动支杆214向下移动,支杆214带动第一活塞板213在活塞筒212的内腔活塞运动产生负压,将压力通过第一连管216传输至三通管217与第二连管218的内腔,再通过第二连管218与箱体221的连通将压力传输至箱体221的内腔,底板211的内腔产生负压,对第二活塞板222与支板223顶起,使橡胶垫224与机器人底座1的底部接触,对机器人底座1进行限位,且在机器人底座1下降带动顶板219与辅助撑板2101向外扩张时,辅助撑板2101带动卡板35向外延伸,卡板35带动拉伸弹簧34进行拉伸,通过拉伸弹簧34的拉伸性能,在拉伸弹簧34拉伸到极限时对辅助撑板2101进行限位,通过上述原理,有效的解决了在机器人震动受力时,容易因弹簧的特性出现晃动,导致机器人站立不稳的问题。
23.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1