一种移动机器人实验平台的制作方法
1.本实用新型属于机器人科研教学领域,尤其涉及一种移动机器人实验平台。
背景技术:
2.机器工程专业作为近年来新兴交叉专业,由于融合了控制技术、移动机器人实验平台、传感器技术、机器视觉等多种学科知识,目前国内高校处于建设阶段,尚未形成统一的教材及行业统一的规范,因而对于新开此专业的各高校,实践教学面临更多困难。
3.每一门实验课程的综合性、创新性的实验涉及多个技术知识点,根据建设要求,实验项目和案例,需要反映行业发展的最新成果及来源于科研和工程最新案例,实验案例尤其是综合性实验案例严重不足。
4.目前,综合性实验案例或是来源于相近专业的经典案例,或是移动机器人实验平台生产线应用案例;但是,它们共有特点是工作空间大,价格昂贵。适用于高校本科机械相关专业实验教学的小型化轻量化实验平台尤其是桌面级设备较少,不满足当前高校专业建设的需求,成为亟待解决的问题之一。
技术实现要素:
5.鉴于上述问题,本实用新型的目的在于解决了移动机器人实验平台使用难度大、作业空间较大的问题。
6.本实用新型采用如下技术方案:所述实验平台包括顶部为开口的实验车,所述实验车顶部设有隔断板,所述隔断板上设有操作台、载台,所述载台上设有安装台,所述安装台上设有载物架、可活动的多关节机械手臂,所述机械手臂末端设有连接板,所述连接板底部设有机械手夹,所述连接板侧壁且位于机械手夹正面设有视觉装置,所述实验车内壁设有安装架,所述安装架内安装有配重块,所述实验车前端且位于安装架两侧还设有行走轮。
7.进一步的,其中位于前侧的一对行走轮还安装有缓冲装置,所述缓冲装置包括转轴连接的支撑板和固定板,所述固定板固定于所述试验车内,行走轮转轴安装至所述支撑板,所述支撑板侧壁设有锁紧块,所述固定板对应锁紧块设有安装块,所述安装块穿入螺柱并拧入至锁紧块上,所述螺柱上且位于安装块与锁紧块之间设有弹簧。
8.进一步的,所述视觉装置包括安装板,所述安装板正面沿高度方向开有滑动槽,所述滑动槽内嵌入安装有滑动块,所述安装板沿高度方向且位于滑动槽内还开有贯穿的长槽,所述安装板上且关于长槽对称开有两条短槽,所述短槽与连接板之间以及长槽与滑动块之间均通过螺栓锁紧,所述滑动块末端还安装有工业相机,所述安装板底部正对工业相机还设有补光灯。
9.进一步的,所述连接板正对安装板开有槽口,所述安装板位于槽口内。
10.进一步的,所述位于实验车内安装有通讯模块,所述通讯模块通过信号线连接至所述操作台内。
11.进一步的,所述操作台顶面为斜面,所述操作台、载台、安装台三者紧密相连,且操
作台与安装台高度平齐。
12.本实用新型的有益效果是:本装置简单易用,协作机器手臂,实验车、视觉装置的编程集成到同一个通讯模块使用,具有允许用户编辑的通讯模块,用户可根据自身需求设计机器手臂的行为,采用视觉装置引导机械手臂实现高精度定位,与传统编程方式兼容,降低系统使用难度。
附图说明
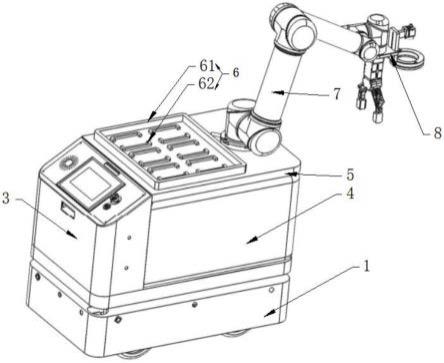
13.图1是本实用新型提供一种移动机器人实验平台整体示意图。
14.图2是本实用新型提供视觉装置一种结构展示图。
15.图3本实用新型提供视觉装置另一种结构展示图。
16.图4本实用新型提供缓冲装置示意图。
17.图5本实用新型提供安装架安装示意图。
18.图6本实用新型提供隔断板示意图。
具体实施方式
19.为了使本实用新型专利目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
20.为了说明本实用新型所述的技术方案,下面通过具体实施例来进行说明。
21.为了便于说明仅示出了与本实用新型实施例相关的部分。
22.结合图1-6所示,所述实验平台包括顶部为开口的实验车1,所述实验车顶部设有隔断板2,所述隔断板上设有操作台3、载台4,所述载台上设有安装台5,所述安装台上设有载物架6、可活动的多关节机械手臂7,所述机械手臂末端设有连接板8,所述连接板底部设有机械手夹9,所述连接板侧壁且位于机械手夹正面设有视觉装置10,所述实验车内壁设有安装架11,所述安装架内安装有配重块12,所述实验车前端且位于安装架两侧还设有行走轮15。
23.本装置主要应用在科研教学领域机器人应用方向,机械手臂与视觉的结合运用是重点的教学内容。主要利用视觉装置对于物料进行识别,经识别后的物料利用机械手臂夹取物料,并将物料(图中未示出)码放整齐。
24.移动机器人实验平台主要由实验车、多关节机械手臂、视觉装置、机械手夹、载物架、通讯模块等组成。多合一控制系统带来了简单便捷、安全可靠、扩展灵活、高效协同的全场景交互体验,可以灵活适应各种工作环境,通过模拟人手、眼、脚的方式配合来完威各种复杂的工作任务,个智能体复合,并协调控制,可灵活控制实验车,多关节机械手臂、视觉装置、机械手夹等设备,其具有作业空间小,价格较便宜的特点。
25.本结构中,所述隔断板主要用来安装安装所述操作台和载台,通过操作台来控制实验车来进行工作。所述载台上的安装台主要安装所述载物架和多关节机械手臂,通过操作台操作控制机械手臂来夹取物料,主要是为了机械手臂能够更灵活的夹取物料,所述机械手臂为多关节机械手臂,由于多关节机械手臂为现有技术,在此不做过多描述。所述连接板主要是为了安装机械收夹和视觉装置,所述连接板安装于机械手臂的末端,连接板底部
安装所述机械手夹,连接板侧壁且位于机械手夹正面设有视觉装置。所述视觉装置识别物料后通过机械手夹取物料至所述载物架上。
26.在本实施例中,结合图4所示:其中位于前侧的一对行走轮还安装有缓冲装置13,所述缓冲装置包括转轴连接的支撑板131和固定板132,所述固定板固定于所述试验车内,行走轮转轴安装至所述支撑板,所述支撑板侧壁设有锁紧块133,所述固定板对应锁紧块设有安装块134,所述安装块穿入螺柱135并拧入至锁紧块上,所述螺柱上且位于安装块与锁紧块之间设有弹簧136。所述配重块主要是为了增加实验车整体的重量,进而提高实验车在工作中的稳定性。所述缓冲装置在实验车行进过程中可以起到很好的防侧翻效果。具体来讲:当实验车工作过程中,实验车两侧压力过大时,由于支撑板和固定板为转轴连接,支撑板将会向后发生转动,安装在支撑板上的锁紧块压缩弹簧,使得实验车两侧有所缓冲。当实验车两侧压力消失后,由于弹簧的作用所述支撑板恢复到原始位置;另外缓冲装置还可以有效减轻缓解实验车在行驶过程中造成的颠簸,对本装置起到一种保护作用。另外值得注意的是:所述安装块上开有的穿入孔的直径大于螺柱直径,主要是当固定板相当于支持板相对转动时,穿入孔为螺柱留足预留空间。
27.作为一种优选结构,结合图2-3所示:所述视觉装置包括安装板101,所述安装板正面沿高度方向开有滑动槽102,所述滑动槽内嵌入安装有滑动块103,所述安装板沿高度方向且位于滑动槽内还开有贯穿的长槽104,所述安装板上且关于长槽对称开有两条短槽105,所述短槽与连接板之间以及长槽与滑动块之间均通过螺栓锁紧,所述滑动块末端还安装有工业相机106,所述安装板底部正对工业相机还设有补光灯107。所述连接板8正对安装板开有槽口108,所述安装板位于槽口内。
28.视觉装置在安装时,首先需要将安装板安装至连接板上,再将工业相机和补光灯一一安装至所述安装板上。在安装安装板时,只需要将安装板放入至所述槽口,再将螺栓一一穿过短槽拧入至所述安装板上锁紧即可,而所述安装板主要用来安装工业相机和补光灯,所述工业相机通过滑动块安装在所述安装板上,所述工业相机的安装位置可以沿滑动槽高度方向进行调节,保证工业相机能够安装在最佳的拍摄位置,而所述滑动块背面还开有安装孔(图中未示出),具体来讲:所述滑动块主要通过在滑动槽内上下滑动来进行调整安装位置。当调整好安装位置时,通过螺栓从安装板背面穿过长槽拧进所述安装孔内锁紧。
29.而所述操作台顶面为斜面,所述操作台、载台、安装台三者紧密相连,且操作台与安装台高度平齐主要是为了使得整个装置看起来更加美观。
30.进一步作为一种优选结构,结合图6所示:所述位于实验车内安装有通讯模块,所述通讯模块通过信号线连接至所述操作台内。所述通讯模块主要是起到控制整个装置的作用,而所述通讯模块14通过信号线连接至所述操作台。
31.所述载物架6包括载物盘61,所述载物盘内均匀安装有多组放置槽62。当机械手臂通过机械手夹夹取物料后,再通过机械手臂将物料放入至所述放置槽中固定,所述放置槽主要是固定物料防止物料掉落以及提高整体的美观度。
32.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1