一种塑料安瓿转运机械手的驱动机构的制作方法
1.本实用新型涉及塑料安瓿的生产设备领域,尤其是一种使用吹灌封一体机生产塑料安瓿时将联排的塑料安瓿转运至冲裁模具处的转运机械手的驱动机构。
背景技术:
2.吹灌封技术即吹瓶—灌装—封口,将医用聚乙烯(pe)或聚丙烯(pp)颗粒制成容器,全自动地完成灌装和封口过程;吹灌封(bfs)一体机将数个制造工艺集成在同一设备中,在无菌状态下完成塑料容器的整个吹塑、灌装和封口等过程,能有效地确保产品的使用安全。吹灌封由于整个过程实现了自动化,并且塑料容器在高温环境下一次成型,免去了传统的洗瓶、灭菌工艺,大大节约了能源和资源。
3.在塑料安瓿的生产过程中,经过吹瓶、灌装、封口完毕后形成联排安瓿瓶,联排安瓿瓶需要通过机械手运送至冲裁模具处,以便将联排的安瓿瓶切开并除去废边。运送联排安瓿瓶的机械手包括两个转运机械手,第一个转运机械手将联排安瓿瓶从灌装设备处转运至与第二个转运机械手的交接处,第二个转运机械手用于将交接处的联排安瓿瓶转运至冲裁模具处。其中,第二个转运机械手由两个相对设置的偏位汽缸驱动作为驱动机构,如图1所示为该转运机械手一侧偏位汽缸组成的驱动机构,图中,偏位汽缸a固定到固定板b上,偏位汽缸的推杆c通过其前端的固定块d与连接板e连接,连接板e同时与设置在固定板b上的滑块f连接,固定块d和滑块f连接在连接板e的同一端,连接板e的另一端连接用于夹持联排安瓿瓶的夹手(图中未示出),该转运机械手两侧的驱动机构轴对称设置,通过两侧驱动机构偏位汽缸a的驱动,带动连接板e上的夹手对联排安瓿瓶进行夹持。
4.参见图1中的驱动机构,偏位汽缸a的前端和后端分别安装有磁敏开关g和h,当磁敏开关g检测到推杆c时,推杆c被推动至偏位汽缸a的最前端,说明两侧驱动机构的夹手对联排安瓿瓶进行夹持,将联排安瓿瓶运送到冲裁模具后,该转运机械手的控制系统控制偏位汽缸a的供气装置驱动推杆c向偏位汽缸a的后端动作,以便将夹持的联排安瓿瓶释放到冲裁模具中,当磁敏开关h检测到推杆c时,推杆c被推动至偏位汽缸a的最后端,说明两侧驱动机构的夹手将联排安瓿瓶完全释放,控制该转运机械手移动至与第一个转运机械手的交接处,该转运机械手的控制系统控制偏位汽缸a的供气装置驱动推杆c向偏位汽缸a的前端动作,以便继续夹持由第一个转运机械手转运的联排安瓿瓶。
5.在图1中的现有驱动机构中磁敏开关g和h分别通过信号线i与控制系统连接,推杆c通过连接板e带动滑块前后运动的过程中,固定块d和滑块f均会摩擦磁敏开关g和h与控制系统连接的信号线i,长时间磨擦导致磁敏开关g和h的信号线i磨损,需要频繁更换,影响该转运机械手及吹灌封一体机整体的运行可靠性和稳定性,并不且由于偏位气缸a固定在该转动机械手内部,维修空间小,不方便信号线i的更换。
技术实现要素:
6.针对现有技术存在的问题,本实用新型的目的在于提供一种塑料安瓿转运机械手
的驱动机构,以解决推杆前端的固定块和滑块在运动过程中磨损信号线的问题。
7.为实现上述目的,本实用新型的技术方案如下:
8.一种塑料安瓿转运机械手的驱动机构,包括:固定板,安装到所述固定板一侧的偏位汽缸和滑块,连接板,检测装置;所述偏位汽缸的推杆前端设置固定块,所述连接板同时与所述固定块和所述滑块连接;
9.在所述连接板滑动方向的一端设置夹手;
10.所述检测装置包括沿所述滑块滑动方向设置的前接近开关和后接近开关,所述推杆带动所述滑块滑动到前端和后端的极限位置时,所述滑块分别接近所述前接近开关和所述后接近开关。
11.进一步,所述偏位汽缸固定到所述固定板的中部,两个所述滑块分别滑动安装到所述偏位汽缸的两侧,所述检测装置邻近一个所述滑块安装。
12.进一步,所述偏位汽缸的两侧分别设置滑轨,所述滑块滑动安装到所述滑轨上。
13.进一步,所述检测装置包括安装到所述固定板上的固定支架,所述前接近开关和所述后接近开关分别安装在所述固定支架的两端。
14.进一步,所述连接板的一侧与所述固定块和所述滑块连接,所述夹手安装到所述连接板的另一侧。
15.本实用新型塑料安瓿转运机械手的驱动机构,将检测转运机械手处于夹持和释放状态的检测装置设置在滑块附近,检测装置包括分别用于检测滑块处于前端和后端的前接近开关和后接近开关,由于滑块随着推杆同步运动,通过前接近开关和后接近开关检测滑块的位置,控制系统同样能够得到该转运机械手处于夹持或释放的状态;由于前接近开关和后接近开关感应端接近并朝向滑块,那么前接近开关和后接近开关分别与控制系统连接的信号线自然地远离滑块,因此,在推杆带动滑块滑动的过程中,固定块和滑块均不会触碰到信号线,从而能够提高该转运机械手和吹灌封一体机的长期运行可靠性和稳定性。
附图说明
16.图1为背景技术中转运机械手的驱动机构部分拆分示意图;
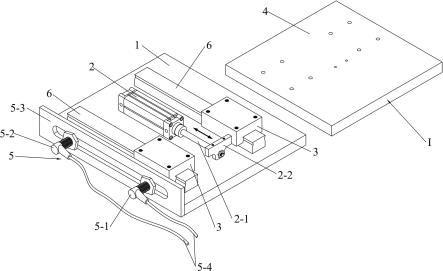
17.图2为本实用新型示例提供的塑料安瓿转运机械手的驱动机构结构示意图;
18.图中:
19.1—固定板;2—偏位汽缸;2-1—推杆;2-2—固定块;3—滑块;4—连接板;5—检测装置;5-1—前接近开关;5-2—后接近开关;5-3—固定支架;5-4—信号线;6—滑轨。
具体实施方式
20.为了使本领域的技术人员更好地理解本实用新型的方案,下面结合本实用新型示例中的附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的示例仅仅是本实用新型的一部分示例,而不是全部的示例。基于本实用新型中的示例,本领域的普通技术人员在没有做出创造性劳动的前提下,所获得的所有其他实施方式都应当属于本实用新型保护的范围。
21.如图2所示,提供了本实用新型一种塑料安瓿转运机械手的驱动机构,包括:固定板1,安装到固定板1一侧的偏位汽缸2和滑块3,连接板4,检测装置5;偏位汽缸2的推杆2-1
前端设置固定块2-2,连接板4同时与固定块2-2和滑块3连接;
22.在连接板4滑动方向的一端设置夹手;
23.检测装置5包括沿滑块3滑动方向设置的前接近开关5-1和后接近开关5-2,推杆2-1带动滑块3滑动到前端和后端的极限位置时,滑块3分别接近前接近开关2-1和后接近开关5-2。
24.本示例塑料安瓿转运机械手的驱动机构,将检测转运机械手处于夹持和释放状态的检测装置设置在滑块3附近,检测装置5包括分别用于检测滑块3处于前端和后端的前接近开关5-1和后接近开关5-2,由于滑块3随着推杆2-1同步运动,通过前接近开关5-1和后接近开关5-2检测滑块3的位置,控制系统同样能够得到该转运机械手处于夹持或释放的状态;由于前接近开关5-1和后接近开关5-2感应端接近并朝向滑块3,那么前接近开关5-1和后接近开关5-2分别与控制系统连接的信号线5-4自然地远离滑块3,参见图2,因此,在推杆2-1带动滑块3滑动的过程中,固定块2-2和滑块3均不会触碰到信号线5-4,从而能够提高该转运机械手和吹灌封一体机的长期运行可靠性和稳定性。
25.需要说明的是,参见图2,本示例固定块2-2、滑块3和连接板4上设置位置和大小对应的固定孔,通过螺钉等紧固件将固定块2-2、滑块3和连接板4固定连接,夹手邻近远离固定孔的连接板4的i端安装。
26.本示例的前接近开关5-1和后接近开关5-2的工作过程可以是:
27.当前接近开关5-1检测到推杆2-1时,推杆2-1被推动至偏位汽缸2的最前端,说明两侧驱动机构的夹手对联排安瓿瓶进行夹持,将联排安瓿瓶运送到冲裁模具后,该转运机械手的控制系统控制偏位汽缸2的供气装置驱动推杆2-1向偏位汽缸2的后端动作,以便将夹持的联排安瓿瓶释放到冲裁模具中,当后接近开关5-2检测到推杆2-1时,推杆2-1被推动至偏位汽缸2的最后端,说明两侧驱动机构的夹手将联排安瓿瓶完全释放,控制该转运机械手移动至需要再次夹持联排安瓿瓶的位置处,该转运机械手的控制系统控制偏位汽缸2的供气装置驱动推杆2-1向偏位汽缸2的前端动作,以便继续夹持联排安瓿瓶。
28.在本示例中,偏位汽缸2固定到固定板1的中部,两个滑块3分别滑动安装到偏位汽缸2的两侧,检测装置5邻近一个滑块安装。由于两个滑块3同步运动,因此,仅需要邻近其中一个滑块3设置一组检测装置5。
29.参见图2,偏位汽缸3的两侧分别设置滑轨6,滑块3滑动安装到滑轨6上。优选地,本示例的滑轨6为凸出固定板1的表面设置,且滑块3为配合扣装到滑轨6上的凹状结构。
30.在本示例中,检测装置5包括安装到固定板1上的固定支架5-3,前接近开关5-1和后接近开关5-2分别安装在固定支架5-2的两端。参见图2,优选地,固定支架5-3安装的固定板的端部,进一步保证在固定板1上滑动的固定块1和滑块3不会触碰到固定支架5-3另一侧的信号线5-4。
31.在本示例中,连接板4的一侧与固定块2-2和滑块3连接,夹手安装到连接板4的另一侧。保证夹手在夹持联排安瓿瓶的过程中,尤其是夹手张开释放联排安瓿瓶的过程中,固定板1不会妨碍夹手的运动。
32.最后,可以理解的是,以上实施方式仅仅是为了说明本实用新型的原理而采用的示例性实施方式,然而本实用新型并不局限于此。对于本领域普通技术人员而言,在不脱离本实用新型的原理和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本
实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1