机械臂和机器人的制作方法
1.本公开涉及机器人技术领域,尤其涉及一种机械臂和机器人。
背景技术:
2.随着自动化技术的发展,各领域逐渐开始采用机器人取代人工完成指定作业。机械臂是一种通过机械结构设计配合电气控制来实现机器代替人体手臂功能的机械臂装置。机械臂能够模仿人体手臂进行抓取物品、搬运物品或者操作工具等作业。
3.而现有的机械臂外观较臃肿,结构不够紧凑,尤其在上臂以及各个关节部位较为明显。由于外观臃肿使得灵活性和稳定性较差,或存在装配较困难,不易维护的问题。
技术实现要素:
4.本公开实施例提供一种机械臂和机器人。
5.本公开实施例第一方面提供一种机械臂,应用于机器人,所述机械臂包括:骨架结构和外壳;所述外壳具有容置腔;所述骨架结构位于所述容置腔内;
6.所述骨架结构包括:n组依次连接的连杆,所述连杆自组装端至自由端顺次连接;第1个所述连杆的一端和任意相邻两组所述连杆之间具有关节组件;
7.连接线束,与所述机器人的电控模组导电连接;所述连接线束与驱动模组顺次串联;
8.所述外壳包括:n个壳体部分;
9.其中,第n个所述壳体部分,位于第n个所述连杆外侧;其中,所述n小于或等于n。
10.基于上述方案,所述机械臂包括:上臂;
11.所述上臂包括:上臂上段和上臂下段;所述n组依次连接的连杆包括:上臂上段的上段连杆,以及所述上臂下段的下段连杆;
12.所述关节组件包括:
13.第一关节组件,所述第一关节组件的固定端用于与所述机器人的主体结构连接,且所述第一关节组件的输出端与所述上段连杆连接;
14.第二关节组件,所述第二关节组件的固定端与所述上段连杆连接,且所述第二关节组件的输出端与所述下段连杆连接。
15.基于上述方案,所述外壳包括:第一外壳;
16.所述第一外壳包括:第一子壳和第二子壳;
17.其中,所述第一子壳和所述第二子壳组装后,形成所述容置腔的第一子腔;所述上段连杆位于所述第一子腔内;
18.所述第一子壳和所述第二子壳组装后的交界线为s型。
19.基于上述方案,所述机械臂还包括:小臂和手部;
20.所述n组依次连接的连杆还包括:所述小臂的小臂连杆和所述手部的手部连杆;
21.所述关节组件还包括:
22.第三关节组件,所述第三关节组件的固定端与所述下段连杆连接,且所述第三关节组件的输出端与所述小臂连杆连接;
23.第四关节组件,所述第四关节组件的固定端与所述小臂连杆连接,且所述第四关节组件的输出端与所述手部连杆连接。
24.基于上述方案,所述外壳通过连接结构与所述骨架结构连接;
25.所述连接结构包括:螺钉和/或插销。
26.基于上述方案,所述外壳具有第一预设面,其中,所述第一预设面为所述机械臂在预设姿态时朝向所述机器人的主体结构的外表面;
27.所述连接结构,连接所述骨架结构和外壳的所述第一预设面。
28.基于上述方案,所述关节组件包括:
29.固定端,与第m个所述连杆连接;
30.输出端,与第m+1个所述连杆连接;其中,所述m为小于所述n的正整数;且第m+1个所述连杆是第m个所述连杆的下一个连杆。
31.基于上述方案,所述固定端包括:固定基座,其中,所述固定基座具有通孔;
32.所述活动端包括:中空转轴;
33.所述中空转轴,活动安装在所述固定基座上;
34.所述连接线束位于所述通孔和所述中空转轴内。
35.基于上述方案,所述关节组件还包括连接法兰;所述关节组件的固定端和输出端均具有连接法兰;
36.在相邻两个所述连杆之间的所述关节组件中,一个所述连杆与所述关节组件的所述固定端的所述连接法兰连接,另一个所述连杆与所述关节组件的所述输出端的所述连接法兰连接。
37.基于上述方案,所述骨架结构还包括:
38.n个所述驱动模组,
39.第n个所述驱动模组,与第n个所述关节组件的输出端连接,用于驱动第n个所述关节组件的输出端转动;
40.第n个所述连杆,与所述输出端固定连接。
41.基于上述方案,所述机械臂还包括:
42.所述手部具有手爪模组,所述手爪模组包括手爪连杆、手爪关节、手爪驱动模组和手爪主体;
43.所述手爪连杆分别与位于所述自由端的关节组件的输出端及所述手爪关节固定连接;
44.所述手爪驱动模组设置于所述手爪连杆,所述手爪关节分别与所述手爪驱动模组及所述手爪主体连接,以驱动所述手爪主体实现开合夹取动作。
45.本公开实施例第二方面提供一种机器人,包括:机械臂;
46.其中,所述机械臂为上述任一项所述的机械臂。
47.本公开的实施例提供的技术方案可以包括以下有益效果:
48.本公开中应用于机器人的机械臂,可包括:骨架结构和外壳,通过外壳形成容置腔,将骨架结构包围在容置腔内,对骨架结构起到保护的作用。通过将机械臂的骨架结构分
为n组依次连接的连杆组成,且机械臂的外壳也由对应的n个壳体部分组成,一个壳体部分对应包围一个连杆。如此,一方面,可根据人体手臂的尺寸调整各个连杆以及壳体部分的尺寸,使得机械臂更趋近于人体的手臂,提升了机械臂的仿生性,另一方面,可以实现相邻连杆之间不会因为壳体部分的相互拉扯,阻碍机械臂在一个或多个自由度的运动,提升了机械臂的灵活性和机械臂的运动稳定性,且外壳包围连杆,将部分关节组件裸露在外侧,使得机械臂更纤细。
附图说明
49.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
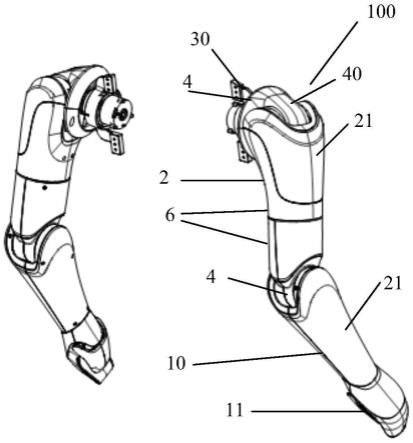
50.图1是根据一示例性实施例示出的机械臂的结构示意图;
51.图2是根据一示例性实施例示出的机械臂的肩部示意图;
52.图3是根据一示例性实施例示出的机械臂的上臂上段示意图;
53.图4是根据一示例性实施例示出的机械臂的基座示意图;
54.图5是根据一示例性实施例示出的机械臂的上臂下段示意图;
55.图6是根据一示例性实施例示出的机械臂的小臂和手部结构示意图。
具体实施方式
56.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的装置的例子。
57.在本公开使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本公开。除非另作定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开说明书以及权利要求书中使用的“第一”“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个,若仅指代“一个”时会再单独说明。“多个”或者“若干”表示两个及两个以上。除非另行指出,“前部”、“后部”、“下部”和/或“上部”等类似词语只是为了便于说明,而并非限于一个位置或者一种空间定向。“包括”或者“包含”等类似词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而且可以包括电性的连接,不管是直接的还是间接的。在本公开说明书和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
58.如图1至图6所示,本公开实施例提供一种机械臂100,应用于机器人,所述机械臂100包括:骨架结构1和外壳2;所述外壳2具有容置腔;所述骨架结构1位于所述容置腔内;
59.所述骨架结构1包括:n组依次连接的连杆3,所述连杆3自组装端至自由端顺次连
接;第1个所述连杆3的一端和任意相邻两组所述连杆3之间具有关节组件4;
60.连接线束,与所述机器人的电控模组导电连接;所述连接线束与驱动模组5顺次串联;
61.所述外壳2包括:n个壳体部分21;
62.其中,第n个所述壳体部分21,位于第n个所述连杆3外侧;其中,所述n小于或等于n。
63.此处的机械臂100是一种通过机械结构设计配合电气控制来实现机器代替人体手臂功能的机械臂装置。机械臂100可以应用在各种机器人,代替人的繁重劳动以实现机械化和自动化,并且还能在有害环境下操作以保护人身安全。
64.一组所述连杆可包括1个连杆或者多个连杆。若包括多个连杆时,多个连杆并列设置在两个关节组件之间。
65.可以理解地,机械臂100包括骨架结构1以及外壳2,外壳2具有容置腔,可将骨架结构1包围在容置腔内,对骨架结构1起到保护的作用。外壳可模拟人体手臂的皮肤,提高机械臂的仿生型,且不同连杆由不同的壳体部分覆盖,如此可以实现相邻连杆之间不会因为壳体部分的相互拉扯,阻碍机械臂在一个或多个自由度的运动,提升了机械臂的灵活性等。
66.此处的外壳2可以由任何的轻质材料制成,包括但不限于塑料材料,如此,可以减轻机械臂的重量。外壳2可通过注塑成型工艺制成,注塑成型工艺生产速度快、效率高,且尺寸精确。
67.示例性地,外壳2可由塑料材料制成,例如,abs塑料(acrylonitrile butadiene styrene),abs塑料是一种强度高、韧性好且易于加工的材料,并且绝缘性很好,几乎不受温度、湿度和频率的影响,可以在大多数的环境下使用。
68.外壳2可包括n个壳体部分21,一个壳体部分21对应一个连杆3,壳体部分21位于连杆3的外侧,将连杆3包围,对连杆3起到保护的作用。壳体2可通过螺栓连接方式将n个壳体部分固定在骨架结构1上,提高壳体部分21与骨架结构1之间的连接稳定性。另外,螺栓的位置通常设置在外壳容纳腔内侧,或者机械臂100较为隐蔽的位置,例如,机械臂100靠近机器人主体结构的位置,即机械臂100的内侧,位置相对隐蔽,能够减小螺栓对机械臂外形的破坏,最大程度的还原手臂的仿生效果。
69.可以理解地,骨架结构1可包括:n组依次连接的连杆3,连杆3自组装端至自由端顺次连接,其中,n大于等于1。示例性地,组装端可为肩部位置,自由端可为手部位置。即,从机械臂的肩部位置到手部位置包括多个连杆3,多个连杆3通过关节组件4组成骨架结构,可以提高机械臂各个部位的灵活性能。
70.第1个连杆的起始端和任意相邻两个连杆之间具有关节组件4,其中,第1个连杆为与机器人主体结构相连的连杆。关节组件4用于连杆3之间的连接或者连杆3与机器人主体结构之间连接,是机械臂运动的枢纽,从而通过关节组件4控制机械臂运动的方向。
71.机械臂100还包括连接线束和驱动模组6,驱动模组6用于驱动关节组件4运动,一个关节组件4对应一个驱动模组6。连接线束与机器人的电控模组导电连接,可以传输电控模组的电和信号。连接线束将n个关节组件4对应的n个驱动模组6连接起来,方便传输电和信号。此处的驱动模组6可包括微型电机或微型磁力模组等。
72.在本公开实施例中,通过将骨架结构分为n个依次连接连杆,连杆外侧具有n个壳
体部分,可以使得不同连杆的长度以及外壳的粗细在可为不同尺寸范围。示例性地,在机械臂的组装端外壳的粗细尺寸可为90mm、100mm、或者110mm等,在机械臂的自由端外壳的粗细尺寸可为45mm、55mm、或者65mm等。通过设置n个连杆以及n个壳体部分,使得机械臂更加近似人体手臂结构,提升了机械臂的仿生性。
73.在一些实施例中,如图1、图3和图5所示,所述机械臂100包括:上臂6;
74.所述上臂6包括:上臂上段61和上臂下段62;所述n组依次连接的连杆3包括:上臂上段61的上段连杆31,以及所述上臂下段62的下段连杆32;
75.所述关节组件4包括:
76.第一关节组件7,所述第一关节组件7的固定端71用于与所述机器人的主体结构连接,且所述第一关节组件7的输出端72与所述上段连杆31连接;
77.第二关节组件8,所述第二关节组件8的固定端81与所述上段连杆31连接,且所述第二关节组件8的输出端82与所述下段连杆32连接。
78.此处的上臂6相当于人体结构的大臂。如此,第一关节组件7和第二关节组件8可以分别实现模拟人体小臂相对于大臂不同方向的旋转,如此,通过一个关节组件的引入,相对于将人体小臂相对于大臂的不同方向旋转都设置在一个关节上,可以缩小单个关节的体积,从而至少在关节组件上能够减少臃肿,进而可以实现更高程度的人体仿生程度。
79.上臂6包括:上臂上段61和上臂下段62,可使得上臂上段61的尺寸大于上臂下段62的尺寸。且n组依次连接的连杆3可包括:上臂上段61的上段连杆31,以及上臂下段62的下段连杆32。通过尺寸的控制,以及将上臂分为上段连杆31和下段连杆32,从而提升了上臂6的仿生性以及运动的灵活性。
80.关节组件4通常包括固定端和输出端,固定端用于相邻连杆固定在一起,输出端用于位于下部的连杆旋转运动,输出端可理解为活动端,通过输出端可使得连杆旋转运动。其中,旋转运动包括:x轴、y轴和z轴的运动。
81.具体地,第一关节组件7包括固定端71和输出端72。通过固定端71和输出端72将机器人的主体结构和上段连杆31连接。示例性地,固定端71与机器人的主体结构通过第一法兰连接,输出端72与上段连杆31通过第二法兰连接。此处固定端71和输出端72与连杆的连接方式也可为其他方式,包括但不限于法兰连接。
82.具体地,第二关节组件8包括固定端81和输出端82。通过固定端81和输出端82将上臂6的上段连杆31和上臂6的下段连杆32连接。示例性地,固定端81与上臂6的上段连杆31通过第三法兰连接,输出端82与上臂6的下段连杆32通过第四法兰连接。此处固定端81和输出端82与连杆的连接方式也可为其他方式,包括但不限于法兰连接。
83.通过将上臂6分为上臂上段61和上臂下段62,并设置第一关节组件7和第二关节组件8,可以分别控制上臂上段61和上臂下段62旋转运动,从而实现上臂运动的精细控制。
84.在一些实施例中,如图3所示,所述外壳2包括:第一外壳9;
85.所述第一外壳9包括:第一子壳91和第二子壳92;
86.其中,所述第一子壳91和所述第二子壳92组装后,形成所述容置腔的第一子腔;所述上段连杆31位于所述第一子腔内;
87.所述第一子壳91和所述第二子壳92组装后的交界线为s型。
88.此处的第一外壳9为上臂上段61的壳体部分,为了便于装配,第一外壳9由第一子
壳91和第二子壳92组成。第一子壳91为上臂上段的上部壳体,第二子壳92为上臂上段的下部壳体,在组装时,将第一子壳91和第二子壳92打开,组装完成后将第一子壳91和第二子壳92拼合起来。
89.第一子壳91和第二子壳92在拼合处具有销柱和销控孔,通过销柱和销孔拼接在一起。销柱和销孔可通过过盈配合的方式,提高拼合的密实度。也可通过在销柱上设置卡扣,通过卡扣将第一子壳91和第二子壳92扣合在一起。
90.第一子壳91和第二子壳92组装完成后,第一子壳91和第二子壳92的交界线为s型,显得上臂上段具有线条感,并且便于装配,方便上臂内部的零部件的更换和维护。
91.在一些实施例中,如图6所示,所述机械臂还包括:小臂10和手部11;
92.所述n组依次连接的连杆还包括:所述小臂10的小臂连杆10a和所述手部11的手部连杆11a;
93.所述关节组件4还包括:
94.第三关节组件12,所述第三关节组件12的固定端12a与所述下段连杆32连接,且所述第三关节组件12的输出端12b与所述小臂连杆10a连接;
95.第四关节组件13,所述第四关节组件13的固定端13a与所述小臂连杆10a连接,且所述第四关节组件13的输出端13b与所述手部连杆11a连接。
96.此处的小臂10相当于人体结构的小臂。如此,第三关节组件12和第四关节组件13可以分别实现模拟人体小臂相对于大臂不同方向的旋转,以及手部相对于大臂和小臂旋转。
97.此处的手部11相对于人体结构的手掌、手背以及手指头。
98.此处的第三关节组件12位于上臂6的下段连杆32和小臂连杆10a之间。
99.此处的第四关节组件13位于小臂连杆10a和手部连杆11a之间。
100.关节组件4通常包括固定端和输出端,固定端用于相邻连杆固定在一起,输出端用于位于下部的连杆旋转运动,输出端可理解为活动端,通过输出端可使得连杆旋转运动。
101.具体地,第三关节组件12包括固定端12a和输出端12b。通过固定端12a和输出端12b将机器人的下段连杆32连接。示例性地,固定端12a与下段连杆32通过第五法兰连接,输出端12b与小臂连杆10a通过第六法兰连接。此处固定端12a和输出端12b与连杆的连接方式也可为其他方式,包括但不限于法兰连接。输出端12b用于控制小臂连杆10a进行旋转运动,其中,旋转运动包括x轴、y轴和z轴运动。
102.具体地,第四关节组件13包括固定端13a和输出端13b。通过固定端12a和输出端12b将小臂连杆10a和手部连杆11a连接。示例性地,固定端13a与上臂13b的小臂连杆10a通过第七法兰连接,输出端13b与手部连杆11a通过第八法兰连接。此处固定端12a和输出端12b与连杆的连接方式也可为其他方式,包括但不限于法兰连接。输出端13b用于控制手部连杆11a进行旋转运动,其中,旋转运动包括x轴、y轴和z轴运动。
103.在一些实施例中,所述外壳通过连接结构与所述骨架结构连接;
104.所述连接结构包括:螺钉和/或插销。
105.具体地,此处外壳包括:第一外壳、第二外壳、第三外壳、以及第四外壳。其中,第一外壳为上臂上段的壳体部分,第二外壳为上臂下段的壳体部分,第三外壳为小臂的壳体部分,第四外壳为手部的壳体部分。
106.此处的骨架结构包括:第一连杆、第二连杆、第三连杆、以及第四连杆。其中,第一连杆为上臂上段的上段连杆,第二连杆为上臂上段的下段连杆,第三连杆为小臂连杆,第四连杆为手部连杆。
107.第一外壳与第一连杆通过螺钉和/或插销连接,第二外壳与第二连杆通过螺钉和/或插销连接,第三外壳与第三连杆通过螺钉和/或插销连接,第四外壳与第四连杆通过螺钉和/或插销连接。
108.此处外壳可先通过插销与骨架结构连接,再通过螺钉对外壳与骨架结构再次紧固,提升了外壳与骨架结构的紧固性,以保证机械臂可进行较大强度的活动。
109.在一些实施例中,第三外壳和/或第四外壳都可包括两个子壳,且第三外壳和/或第四外壳的两个子壳可以按照小臂或者手部的伸长方向对称分布。
110.为了实现机械臂分段式设计的结构,外壳与骨架结构独立连接,连接方式有螺钉和/或插销,保证了外壳与骨架结构的刚度,在机器人运行的震动状态下,也保证了机械臂结构稳定性。同时,为了提高螺钉的隐藏性,螺钉的位置通常设置在外壳容纳腔内侧,或者外壳的隐蔽的位置,例如,外壳靠近机器人主体结构的位置,即外壳的内侧,位置相对隐蔽,能够减小螺栓对机械臂外形的破坏,最大程度的还原手臂的仿生效果。
111.在一些实施例中,如图3所示,所述外壳具有第一预设面14,其中,所述第一预设面14为所述机械臂在预设姿态时朝向所述机器人的主体结构的外表面;
112.所述连接结构,连接所述骨架结构和外壳的所述第一预设面14。
113.示例性地,预设姿态可包括:手臂与机器人的主体结构平行时的姿态。
114.示例性地,第一预设面可为靠近机械臂内侧的位置,或者靠近主体结构腋下外表面的位置。
115.外壳具有第一预设面,第一预设面为机械臂在预设姿态时朝向机器人的主体结构的外表面。在预设姿态下,连接结构处于隐藏状态,通过连接结构保证了外壳的刚度,并通过隐藏状态提升了机械臂的仿生效果。
116.在一些实施例中,所述关节组件包括:
117.固定端,与第m个所述连杆连接;
118.输出端,与第m+1个所述连杆连接;其中,所述m为小于所述n的正整数;且第m+1个所述连杆是第m个所述连杆的下一个连杆。
119.此处的关节组件为机械臂的所有关节组件。
120.具体地,关节组件包括:第一关节组件、第二关节组件、第三关节组件和第四关节组件。连杆包括:机器人的主体结构的连杆、上臂上段的上段连杆、上臂上段的下段连杆、小臂连杆和手部连杆。
121.第一关节组件的固定端与机器人的主体结构的连杆连接,第一关节组件的输出端与上臂上段的上段连杆的组装端连接。第二关节组件的固定端与上臂上段连杆自由端连接,第二关节组件的输出端与上臂下段连杆组装端连接。第三关节组件的固定端与上臂下段连杆自由端连接,第三关节组件的输出端与小臂连杆的组装端连接。第四关节组件的固定端与小臂连杆的自由端连接,第四关节组件的输出端与手部连杆的组装端连接。
122.如此,通过关节组件的固定端将连杆进行固定连接,输出端将连杆活动连接,使得上一个连杆能够驱使下一个连杆旋转运动,实现了机械臂的仿生效果。
123.在一些实施例中,如图4所示,所述固定端包括:固定基座15,其中,所述固定基座15具有通孔;
124.所述活动端包括:中空转轴16;
125.所述中空转轴16,活动安装在所述固定基座15上;
126.所述连接线束位于所述通孔和所述中空转轴16内。
127.可以理解地,为了上臂可以带动小臂和手部同时旋转运动,在每个关节组件的固定端均具有固定基座,固定基座有通孔,连接线束可穿过固定基座的通孔,从而将连接线束从固定端引向活动端。在活动端设有中空转轴,中空转轴活动安装在固定基座上,可以进行旋转运动,控制旋转的方向。中空转轴为空心结构,连接线束可穿过中空转轴,向另一个关节组件延伸。
128.如此,关节组件固定端的固定基座的通孔以及活动端的中空转轴使得连接线束从连杆的组装端向自由端顺次连接,通过连接线束将电和信号传输给各个关节组件,最大限度的以实现机械臂的仿生效果。
129.在一些实施例中,所述关节组件还包括连接法兰;所述关节组件的固定端和输出端均具有连接法兰;
130.在相邻两个所述连杆之间的所述关节组件中,一个所述连杆与所述关节组件的所述固定端的所述连接法兰连接,另一个所述连杆与所述关节组件的所述输出端的所述连接法兰连接。
131.示例性地,相邻两个连杆以机器人的主体结构连杆和上臂上段的上段连杆为例。主体结构连杆和上段连杆之间具有第一关节组件。具体地,主体结构连杆与第一关节组件的固定端通过固定端的法兰连接,上臂上段的上段连杆与第一关节组件的输出端通过输出端的法兰连接。
132.又示例性地,相邻两个连杆以上臂上段的上段连杆和上臂上段的下段连杆为例。上段连杆和下段连杆之间具有第二关节组件。具体地,上段连杆与第二关节组件的固定端通过固定端的法兰连接,下段连杆与第二关节组件的输出端通过输出端的法兰连接。
133.如此,通过法兰连接,可方便关节组件的维修拆卸,且法兰连接强度高,密封性能好。
134.在一些实施例中,所述骨架结构还包括:
135.n个所述驱动模组,
136.第n个所述驱动模组,与第n个所述关节组件的输出端连接,用于驱动第n个所述关节组件的输出端转动;
137.第n个所述连杆,与所述输出端固定连接。
138.可以理解地,驱动模组是用于驱动关节组件旋转活动,指示关节组件的旋转方向。驱动组件与关节组件的输出端连接,用于驱动关节组件的输出端转动。
139.驱动模组可包括微型电机或者微型磁力模组等。
140.驱动模组位于关节组件的输出端,便于控制关节组件的活动方向。
141.具体地,驱动模组可包括第一驱动模组、第二驱动模组、第三驱动模组和第四驱动模组。第一驱动模组与第一关节组件的输出端连接,用于驱动机械臂的上臂上段转动。第二驱动模组与第二关节组件的输出端连接,用于驱动机械臂的上臂下段转动。第三驱动模组
与第三关节组件的输出端连接,用于驱动小臂转动。第四驱动模组与第四关节组件的输出端连接,用于驱动手部转动。
142.在一些实施例中,所述机械臂还包括:
143.所述手部具有手爪模组,所述手爪模组包括手爪连杆、手爪关节、手爪驱动模组和手爪主体;
144.所述手爪连杆分别与位于所述自由端的关节组件的输出端及所述手爪关节固定连接;
145.所述手爪驱动模组设置于所述手爪连杆,所述手爪关节分别与所述手爪驱动模组及所述手爪主体连接,以驱动所述手爪主体实现开合夹取动作。
146.可以理解地,为了控制手部手爪的夹取动作的精细度,在手部设置有手爪模组,手爪连杆可与手部连杆连接,
147.手爪关节可与第四关节组件连接,手爪驱动模组用于驱动手爪主体,通过机械臂的上臂、小臂以及手部可以配合手爪模组实现开合夹取动作。
148.本公开实施例提供一种机械臂,包括:
149.机械臂具有双臂,分别为左臂和右臂,如图1所示,图1展示人形机器人双臂侧视图,图1以右臂为例展示单臂各个模块环节,左臂与右臂为镜像关系。右臂具体为30基座模块,40肩部模块,61上臂上段模块,62上臂下段模块,10小臂及11手部模块。每个模块均由独立的高功率密度关节,各个模块均连接骨架结构,驱动模组,以及外壳。
150.如图1和图4所示,基座模块30由基座连接骨架30a,主体结构关节组件30b以及主体结构驱动模组组成。主体结构驱动模组固定连在人形机器人主体结构(胸腔)内,未在图中显示。主体结构关节组件30b通过螺钉连接在基座连接骨架30a的圆周法兰上,而基座连接骨架30a通过设置在上下两处的凸缘耳板连接在人形机器人胸腔骨架上。
151.驱动模组引出主体结构关节组件30b所需的连接线束(三相线缆及编码器信号线),连接在主体结构关节组件30b尾部,同时引出后续关节所需的供电及信号线缆通过主体结构关节组件30b的中空孔,从主体结构关节组件30b尾部进入,从主体结构关节组件30b前端旋转部分穿出,预备连接第一关节组件。
152.本公开实施例中的关节转接骨架相当于上述任意实施例中的连杆。
153.如图2所示,展示肩关节模块40结构及其爆炸图,肩关节模块40由肩部上壳40a,第一驱动模组40b,驱动模块转接板40c,肩部下壳40d,第一关节转接骨架40e,第一关节组件40f组成,具体结构详述:
154.第一关节组件40f的固定端法兰通过螺钉安装在第一关节转接骨架40e的大直径法兰处,而第一关节转接骨架40e的小直径法兰连接在主体结构关节组件30b的输出法兰上,由此形成主体结构关节组件30b的旋转运动(pitch)。通过驱动模块转接板40c将第一驱动模组40b固定在第一关节组件40f的尾部,通过共用第一关节组件40f尾部压盖的安装螺钉实现,可以将关节与驱动器模块在关节轴线方向的尺寸压缩至最小。
155.基座模块30引出的线缆穿过第一关节转接骨架40e接入第一驱动模组40b,供给第二关节组件的供电线缆和信号线缆从第一驱动模组40b引出,穿过第一关节组件40f的中空孔结构,预备连接第二关节组件。
156.肩部下壳40d,可以为任何轻质塑料材质,通过两颗螺钉固定在第一关节转接骨架
40e下部的两根外伸连接柱上。肩部上壳40a,可以为任何轻质塑料材质,两侧设置有定位销柱结构与肩部下壳40d实现定位,防止变形,定位销柱内测设置有卡扣结构,用于防止肩部上壳40a和肩部下壳40d上下方向分离,前端圆形外形设置有两个螺钉孔位,用于连接肩部上壳40a和肩部下壳40d的前端。此处在外形表面露出的螺钉孔位将被上臂上段模块61遮挡。
157.如图3所示,展示上臂上段模块结构及其爆炸图,上臂上段模块结构61包括:上臂上段上壳91,第二关节组件8,第二关节转接骨架61a,转接板61b,上臂上段下壳92,第二关节驱动模组61c。具体结构详述:
158.第二关节组件8通过螺钉固定在第二关节转接骨架61a下端连接法兰上,第二关节转接骨架61a上端小直径法兰连接肩关节模块40的第一关节组件输出法兰,由此形成了第一关节组件的旋转运动(row)。转接板61b通过螺钉固定在第二关节转接骨架61a侧面,用于连接外壳结构。第二关节驱动模组61c通过螺钉固连在第二关节转接骨架61a背面。
159.肩关节模块40引出的线缆穿过第二关节转接骨架61a小直径法兰中空孔,又继续穿过左侧斜下方的小中空孔进入上臂上段下壳92,可以为任何轻质塑料材质,通过两颗螺钉从右侧拧入转接板61b,又通过两颗螺钉从左侧,穿过转接板61b拧入上臂上段下壳92,共四颗螺钉将上臂上段下壳92紧固在第二关节转接骨架61a上;上臂上段上壳91,可以为任何轻质塑料材质,下端伸出有销柱和卡扣,从上方向下插入上臂上段下壳92中,在s型分型线的上段边沿处通过从上向下锁附的两壳螺钉将上臂上段上壳91锁紧在第二关节转接骨架61a和上臂上段下壳92上。
160.如图5所示,展示上臂下段模块结构及其爆炸图,上臂下段模块结构62包括:左装饰环62a,上臂下段左壳62b,第三关节转接骨架62c,第三关节驱动模组62d,第一支撑半圆环62e,右装饰环62f,上臂下段右壳62g,第二支撑半圆环62h,第三关节组件12。具体结构详述:
161.第三关节组件12通过螺钉固定在上臂下段转接骨架62c下端法兰上,上臂下段转接骨架62c上端小直径法兰连接上臂上段模块61的第二关节组件输出法兰,由此形成了第二关节组件的旋转运动(yaw)。第一支撑半圆环62e和第二支撑半圆环62h组成用于连接上臂下段外壳的骨架延申部分,通过螺钉安装在上臂下段转接骨架62c上。
162.上臂上段模块61引出的线缆穿过第三关节转接骨架62c小直径法兰中空孔,连接在第三关节驱动模组62d上,供给给手爪关节的供电线缆和信号线缆从第三关节驱动模组62d引出,从第三关节组件12尾部进入第三关节组件12中空孔,预备连接手爪关节。
163.左装饰环62a,表面为金属装饰效果,以任意粘贴形式粘接在上臂下段左壳62b上,右装饰环62f同理。上臂下段左壳62b和上臂下段右壳62g,可以为任何轻质塑料材质,分别从左侧和右侧装配在第三关节转接骨架62c,第一支撑半圆环62e和第二支撑半圆环62h的组合圆环上,上臂下段左壳62b内设置一定的定位销柱,定位在第三关节转接骨架62c上,同时增加连接刚度,随后通过螺钉锁紧在第三关节转接骨架62c上,62g上臂下段右壳边缘位置设置一定的定位销柱,定位在上臂下段左壳62b上,然后通过上端两个外露螺钉锁附在第三关节转接骨架62c上,下端四颗螺钉锁附在第一支撑半圆环62e和第二支撑半圆环62h的组合圆环上。
164.如图6,展示小臂10及手部11模块结构及其爆炸图,具体包括:第三关节组件10c输
出法兰,过渡套筒10d,小臂左壳10e,手爪关节驱动器模组10f,手爪关节10g及传动组件,手背外壳11f,外壳支撑11g,小臂右壳10h,手腕外壳11k,手掌壳11e,活动爪组件11c,活动爪内表皮11d。
165.第三关节组件10c输出法兰和过渡套筒10d通过销柱和螺钉锁附连接,手爪关节10g及传动组件安装在过渡套筒10d下方,三者组成小臂内部骨架结构。第三关节组件10c输出法兰侧面圆形法兰连接上臂下段模块62的第三关节组件,形成第三关节组件旋转运动(pitch方向)。
166.手爪关节驱动器模组10f装配在过渡套筒10d内部,从上臂下段模块62穿出的线缆通过第三关节组件10c输出法兰侧面中空孔和水平中空孔,引入手爪关节驱动器模组10f,从而控制手爪运动。
167.外壳11g支撑通过销柱和螺钉锁附连接在第三关节组件10c输出法兰和过渡套筒10d上,小臂左壳10e可以为任何轻质塑料材质,内部设置三组销柱,分别对应插入第三关节组件10c输出法兰,过渡套筒10d和手爪关节10g及传动组件上的对应销孔处,实现小臂左壳10e的定位并增强刚性。通过小臂左壳10e上端的两个螺钉将小臂左壳的上半部分锁紧在第三关节组件10c输出法兰上方左右两侧两个耳板上。手背外壳11f,可以为任何轻质塑料材质,伸出两个外伸连接板,共设置四个螺钉过孔,两个外伸连接板插入小臂左壳10e内部空腔中,通过四颗螺钉将手爪关节10g及传动组件和小臂左壳10e,手背外壳11f连接在一起。手爪关节10g及传动组件末端伸出两个连接耳板与手背外壳11f中心处的两个螺孔对齐,通过两个螺钉在此处锁附。由此实现了小臂,手部外壳可基座的上中下三处螺钉连接,增强了外壳刚性,保证了手部夹取物品时的刚性。
168.小臂右壳10h,手腕外壳11k,手掌壳11e,活动爪组件11c依次从右侧向左侧往各个连接件上安装,同样通过销柱与螺钉的形式连接,活动爪11d内表皮粘接在活动爪组件11c内表面,其为软胶材料,增加表面摩擦系数,为抓取动作提供便利。
169.本公开实施例还提供一种机器人,包括:机械臂;
170.其中,所述机械臂为上述实施例中任一项所述的机械臂。
171.本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本公开的其它实施方案。本公开旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由下面的权利要求指出。
172.应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1