一种自适应调节重物质心的刚性背负外骨骼
1.本实用新型属于外骨骼技术领域,尤其涉及一种自适应调节重物质心的刚性背负外骨骼。
背景技术:
2.外骨骼是一种辅助人体行走运动的仿生机器人,背负外骨骼主要用于辅助人体长时间的负重行走,具有增强人体负重能力,在运动过程中为人体提供助力的功能。在负重行走过程中,重物随人体运动而在竖直方向上振荡,所产生的振荡力会增大人体上肢受力,大大降低人体的负重能力,也是导致上肢疲劳的主要因素之一。
3.研究表明,在人体行走过程中减小重物的振荡可有效缓解人体上肢疲劳,现有的背负外骨骼大多采用弹簧、绳轮等机构作为重物质心调节机构,以达到缓冲减震的目的。如申请号为202110585438.0的专利申请公开了一种负重外骨骼背负装置,当重物在竖向往复运动时,重物作用在旋转连接件上的作用力发生变化,两个支撑杆之间设有支撑弹簧,重物对旋转连接件作用力的变化会引起支撑弹簧的变形,此时支撑弹簧将通过变形对动态负重时的能量进行缓冲,吸收部分重物对外骨骼和人体产生的直接作用力,达到缓冲减震的目的。但是弹簧的弹力不可控,当重物重量过小或过大,人体运动速度较快时,会导致机构稳定性下降,缓解重物振荡的效果较差。
技术实现要素:
4.针对现有技术的不足,本实用新型拟解决的技术问题是,提出了一种自适应调节重物质心的刚性背负外骨骼。
5.本实用新型解决所述技术问题采用的技术方案是:
6.一种自适应调节重物质心的刚性背负外骨骼,包括上身背负部分、承重板和驱动机构,上身背负部分包括主机架和上身绑缚部分;两个驱动机构对称设置在主机架的两侧,承重板位于主机架的后侧;
7.所述驱动机构包括大腿绑缚杆、连杆、三角架、滑动杆和滑块;主机架侧面的前端与大腿绑缚杆的上端转动连接,主机架侧面的后端与三角架的第一顶点转动连接,连杆的一端与三角架的第二顶点转动连接,连杆的另一端与大腿绑缚杆的中部转动连接,三角架的第三顶点转动连接有滑块;滑动杆的上端插装在主机架侧面的后端,滑动杆的上端与承重板的中部接触而不固定,滑动杆的下端设有与滑块配合的水平滑槽,滑块能够在水平滑槽内往复滑动;大腿绑缚杆、主机架与大腿绑缚杆和三角架两个连接点之间的部分、三角架第一顶点与第二顶点之间的部分、连杆共同构成四杆机构,滑动杆和滑块构成正弦机构,三角架作为正弦机构的动力源;在人体负重行走过程中,在四杆机构的作用下,滑动杆沿着主机架上、下往复移动,使承重板上、下往复移动,以减小重物质心的振荡。
8.进一步的,将三角架的第一顶点、第二顶点和第三顶点分别记为点d、c、e,则三角架的dc杆与de杆之间的夹角为76
°
,de杆与ec杆之间的夹角为44
°
;de杆的长度为140mm;滑
动杆的水平滑槽的长度为215mm。
9.进一步的,所述主机架呈l型,包括底部支架和位于底部支架之上的弧形背板;底部支架上设有承重板引导杆,承重板套装在承重板引导杆上,承重板能够沿着承重板引导杆上、下往复移动。
10.进一步的,所述滑动杆的上端部设有海绵层,通过海绵层实现滑动杆与承重板的柔性接触。
11.与现有技术相比,本实用新型的有益效果是:
12.1.大腿绑缚杆、主机架与大腿绑缚杆和三角架两个连接点之间的部分、三角架第一顶点与第二顶点之间的部分、连杆共同构成四杆机构,滑动杆和滑块构成正弦机构,三角架作为正弦机构的动力源;在四杆机构和正弦机构的作用下,在步态周期的双支撑相末期至下一个双支撑相初期,重物从最高点下移至最低点,再上移至最高点,使重物的移动方向与人体重心的变化方向相反,即人体重心从最低点运动至最高点的过程中,重物从最高点运动至最低点,人体重心从最低点运动至最高点的过程中,重物从最低点运动至最高点,实现重物质心的自适应调节;通过控制重物的移动方向来减小重物的振荡,以减小人体上肢受力,缓解上肢疲劳,提高负重能力。
13.2.本实用新型使用纯机械式刚性结构,背负重物的重量范围大、结构简单、稳定可控,可降低重物跟随人体运动产生的振荡;在无外部驱动的情况下即可正常使用,并减少了人体肩背部所受来自重物的压力及下肢髋关节的峰值力矩。实验表明,背负30kg重物时,人体肩部所受压力降低53.68%;背部所受压力降低53.65%;腰椎关节力矩降低51.23%;髋关节力矩降低20.10%。本实用新型可以作为模块化结构,与其他现有的髋关节驱动下肢外骨骼组装使用,可应用于工人进行搬运工作等需要长时间背负重物行走的工作场合中。
附图说明
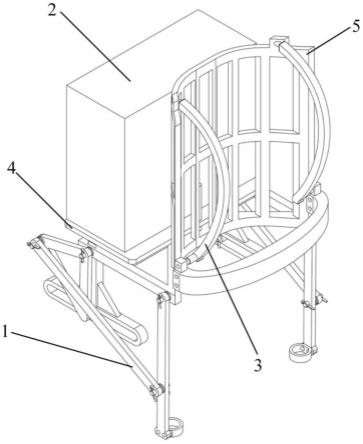
14.图1为本实用新型的整体结构示意图;
15.图2为本实用新型的右视图;
16.图3为本实用新型的驱动机构与主机架的连接示意图;
17.图4为图3中部位c的爆炸图;
18.图5为图3中部位a的爆炸图;
19.图6为图3中部位b的爆炸图;
20.图7为三角架的尺寸图;
21.图8为滑动杆的尺寸图;
22.图9为上身背负部分的结构示意图;
23.图10(a)为步态周期的双支撑相末期支撑腿侧驱动机构的位置示意图;
24.图10(b)为步态周期的单支撑相中期支撑腿侧驱动机构的位置示意图;
25.图10(c)为步态周期的双支撑相初期支撑腿侧驱动机构的位置示意图;
26.图11为正常行走过程中人体重心变化轨迹图;
27.图12为有、无外骨骼的情况下,人体负重行走过程中重物质心的变化轨迹对比图;
28.图中:1、驱动机构;2、重物;3、上身绑缚部分;4、承重板;5、主机架;
29.100、大腿绑缚杆;101、连杆;102、三角架;103、滑动杆;104、滑块;105、销轴;106、
销轴垫圈;107、第一定位销;108、阶梯轴;109、第二定位销;110、阶梯轴垫圈;111、第三定位销;112、滑块垫圈;113、连接轴;300、第一肩部绑带;301、第二肩部绑带;302、腰腹部横向绑带;401、承重板引导杆;501、底部支架;502、弧形背板;
30.100-1、大腿绑带;103-1、水平滑槽;103-2、海绵层。
具体实施方式
31.下面结合具体实施方式和附图对本实用新型的技术方案进行详细描述,并不用于限定本技术的保护范围。
32.本实用新型为一种自适应调节重物质心的刚性背负外骨骼(简称背负外骨骼,参见图1~12),包括上身背负部分、承重板4和两个驱动机构1,上身背负部分包括主机架5和上身绑缚部分3;两个驱动机构1对称设置在主机架5的两侧,承重板4与主机架5的后侧连接,用于放置重物2;
33.所述驱动机构1包括大腿绑缚杆100、连杆101、三角架102、滑动杆103和滑块104;主机架5侧面的前端与大腿绑缚杆100的上端转动连接,主机架5侧面的后端与三角架102的第一顶点d转动连接,连杆101的一端与三角架102的第二顶点c转动连接,连杆101的另一端与大腿绑缚杆100的中部转动连接,三角架102的第三顶点e转动连接有滑块104;滑动杆103呈t型结构,滑动杆103的上端插装在主机架5侧面的后端,且滑动杆103的上端与承重板4的中部接触而不固定,滑动杆103的下端设有与滑块104配合的水平滑槽103-1,滑块104能够在水平滑槽103-1内往复滑动;大腿绑缚杆100、主机架5与大腿绑缚杆100和三角架102两个连接点之间的部分、三角架102第一顶点d与第二顶点c之间的部分、连杆101共同构成四杆机构,滑动杆103和滑块104构成正弦机构,三角架102作为正弦机构的动力源;在人体负重行走过程中,在四杆机构的作用下,滑动杆103能够在与主机架5的连接孔内上、下往复移动,使承重板4上、下往复移动,减小重物质心的振荡。
34.如图4所示,所述三角架102的第三顶点处设有连接轴113,滑块104转动安装在连接轴113上,第三定位销111插装在连接轴113上,对滑块104进行轴向限位;连接轴113上还设有滑块垫圈112,避免滑块104与三角架102形成面接触,减小摩擦。如图5所示,大腿绑缚杆100的上端和三角架102的第一顶点d分别通过销轴105与主机架5转动连接,第一定位销107插装在销轴105上,进行轴向限位;销轴105上还设有销轴垫圈106,避免大腿绑缚杆100与主机架5形成面接触,减小摩擦。如图6所示,连杆101的两端分别通过阶梯轴108与大腿绑缚杆100的中部和三角架102的第二顶点c转动连接,每个阶梯轴108的两端均插装有第二定位销109和安装有阶梯轴垫圈110,通过第二定位销109对阶梯轴108进行轴向限位,通过阶梯轴垫圈110减小摩擦。
35.如图7~8所示,点d、c、e分别记为三角架102的第一顶点、第二顶点和第三顶点,则三角架102的dc杆与de杆之间的夹角为76
°
,de杆与ec杆之间的夹角为44
°
,de杆的长度为140mm;滑动杆103的水平滑槽103-1的长度为215mm。
36.如图9所示,所述主机架5呈l型,包括底部支架501和位于底部支架501之上的弧形背板502;大腿绑缚杆100和三角架102均与底部支架501连接,底部支架501上设有承重板引导杆401,承重板4套装在承重板引导杆401上与承重板引导杆401不固连,两个滑动杆103的上端均与承重板4的中部接触,在人体行走过程中,在两个滑动杆103的作用下,承重板4能
够沿着承重板引导杆401上、下往复移动。
37.所述上身绑缚部分3包括第一肩部绑带300、第二肩部绑带301和腰腹部横向绑带302;第一肩部绑带300和第二肩部绑带301对称安装在弧形背板502的两侧,腰腹部横向绑带32的两端分别与弧形背板502两侧的下端连接,每个绑带的长度均可调节。
38.所述滑动杆103的上端部设有海绵层103-2,通过海绵层103-2实现滑动杆103与承重板4的柔性接触,以补偿驱动机构1在运动过程中可能出现的位移偏差。
39.所述大腿绑缚杆100的下端设有大腿绑带100-1,用于将大腿绑缚杆100穿戴在人身上。
40.如图10(a)~(c)所示,对于支撑腿而言,在步态周期的双支撑相末期,大腿绑缚杆100转动至人体前侧,滑块104位于滑动杆103的水平滑槽103-1前端,此时滑动杆103位于上止点,重物2位于最高点;在步态周期的单支撑相中期,大腿绑缚杆100直立,滑块104位于滑动杆103的水平滑槽103-1的中间位置,此时滑动杆103位于下止点,重物2位于最低点;在步态周期的双支撑相初期,大腿绑缚杆100转动至人体后侧,滑块104位于滑动杆103的水平滑槽103-1后端,此时滑动杆103回到上止点,重物2回到最高点。
41.本实用新型的工作原理和工作流程是:
42.将本实用新型的背负外骨骼穿戴在人身上,人体两条大腿作为背负外骨骼的动力源。从单侧来看,背负外骨骼为一自由度开链机构,从整体来看为二自由度闭链机构,包括左侧髋关节的旋转运动和右侧髋关节的旋转运动。如11图所示,在人体正常行走过程中,人体重心的变化轨迹因两条腿的运动而呈现正弦变化;在步态周期的双支撑相,人体重心位于最低点;随着摆动腿离地抬高,人体重心逐渐上移,在步态周期的单支撑相中期,人体重心位于最高点;随后,摆动腿下降为着地作准备,人体重心逐渐下移,在单支撑相末期,人体重心回到最低点;因此,在人体行走过程中,人体重心不断的从最低点变化至最高点,再从最高点回到最低点。为了在人体负重行走过程中,减小重物随人体运动产生的振荡,减小人体上肢受到的压力,本实用新型通过驱动机构1,使重物2随人体运动而上、下往复移动,通过减小重物质心振荡的方式减轻人体上肢所受的压力,以缓解长时间负重行走导致的上肢疲劳。
43.以左腿为摆动腿,右腿为支撑腿,对支撑腿侧的驱动机构1的运动过程进行说明;以步态周期的双支撑相末期为初始状态,此时支撑腿迈向人体前侧,滑块104位于滑动杆103的水平滑槽103-1的前端,滑动杆103位于上止点,重物2位于最高点;随着摆动腿离地,大腿绑缚杆100绕着主机架5顺时针转动,在连杆101的作用下,三角架102绕着主机架5顺时针转动,滑块104朝向水平滑槽103-1的后端滑动,同时带动滑动杆103向下移动,使重物2从最高点向下移动;在步态周期的单支撑相中期,摆动腿抬至最高位置,大腿绑缚杆100顺时针转动至竖直状态,滑块104滑动至水平滑槽103-1的中间位置,滑动杆103向下移动至下止点,重物2移动至最低点;摆动腿继续运动,大腿绑缚杆100继续顺时针转动,滑块104继续朝向水平滑槽103-1的后端滑动,使滑动杆103从下止点向上移动,在步态周期的下一个双支撑相初期,摆动腿着地,大腿绑缚杆100顺时针旋转至人体后侧,滑块104滑动至水平滑槽103-1的后端,滑动杆103向上移动至上止点,重物2回到最高点;在双支撑相末期至下一个双支撑相初期,重物2从最高点下移至最低点,再上移至最高点,使重物2的移动方向与人体重心的变化方向相反,即人体重心从最低点运动至最高点的过程中,重物2从最高点运动至
最低点,人体重心从最低点运动至最高点的过程中,重物2从最低点运动至最高点,实现重物质心的自适应调节;通过控制重物的移动方向来减小重物的振荡。
44.图12为有、无外骨骼的情况下,人体负重行走过程中重物质心的变化轨迹对比图;从图中可知,在没有外骨骼的情况下,重物与人体同步运动,即重物的运动方向与人体重心的变化方向相同,人体运动加剧了重物的振荡幅度,重物质心的振荡幅度为5.5cm左右。使用外骨骼后,重物质心的振荡幅度为1.5cm左右,这是由于在外骨骼的作用下重物对人体运动产生抵抗运动,在人体负重行走过程中,外骨骼自适应调节重物质心,使得重物的运动方向与人体重心变化方向相反,减小了重物质心的振荡幅度,进而减小重物对人体上肢的压力,缓解人体上肢疲劳。
45.本实用新型未述及之处适用于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1