一种机械臂用夹爪
本技术涉及机械夹爪,具体涉及一种机械臂用夹爪。
背景技术:
1、目前随着工业自动化的快速发展,机械爪正在逐渐取代传统的人力工作,在实际工业生产中刚性机械爪对不同种类物品进行爪进行抓取时,不容易更换夹爪,并且传统的机械爪容易损坏目标物或因机械爪抓取力不足而导致目标物掉落。因此,需要一种机械臂用夹爪解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种机械臂用夹爪,以解决现有技术中导致的上述多项缺陷。
2、一种机械臂用夹爪,包括安装板,所述安装板的两侧转动连接有夹臂,所述夹臂的底端连接有安装块,所述安装块上安装有设有凹槽,所述凹槽的开口处设有导向块,所述导向块的一侧内嵌有强磁体一,所述凹槽内滑动连接嵌块,所述嵌块上设有能够插接导向块的通槽,所述通槽的内壁内嵌有与强磁体一相互吸引的强磁体二,所述嵌块的一侧安装有柔性橡胶垫。
3、优选的,所述安装板上安装有驱动电机,所述驱动电机的输出端连接有螺纹杆,所述螺纹杆上连接有滑块,所述滑块通过螺纹杆的转动进行移动,所述滑块的两端转动连接有驱动臂,两所述驱动臂的一端分别转动连接于对应的夹臂上。
4、优选的,所述安装板的侧壁设有支撑柱,所述支撑柱的上端安装有连接台。
5、优选的,所述螺纹杆的底端设有防脱块。
6、优选的,所述柔性橡胶垫的一侧设有防滑纹。
7、本实用新型的优点在于:本实用新型通过将嵌块插接在凹槽内,并将导向块插接在通槽内,随后驱动电机带动螺纹杆转动,使得滑块上移并带动驱动臂驱动夹臂转动,接着两夹臂相向运动并通过橡胶柔性垫夹持目标物,避免损坏目标物,同时嵌块便于更换可满足抓取不同目标物的需求,防滑纹可避免目标物滑落。
技术特征:
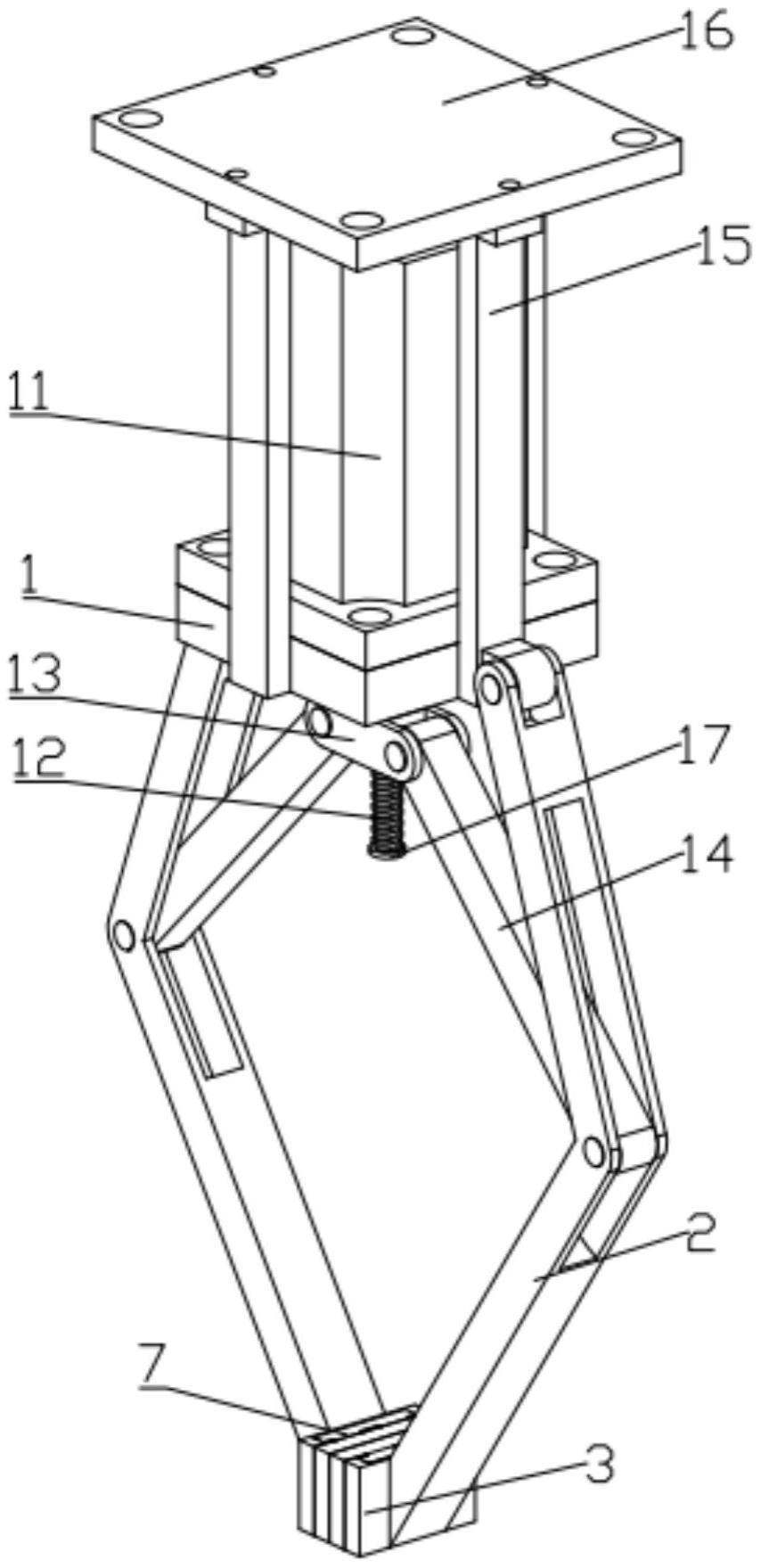
1.一种机械臂用夹爪,其特征在于:包括安装板(1),所述安装板(1)的两侧转动连接有夹臂(2),所述夹臂(2)的底端连接有安装块(3),所述安装块(3)上安装有设有凹槽(4),所述凹槽(4)的开口处设有导向块(5),所述导向块(5)的一侧内嵌有强磁体一(6),所述凹槽(4)内滑动连接嵌块(7),所述嵌块(7)上设有能够插接导向块(5)的通槽(8),所述通槽(8)的内壁内嵌有与强磁体一(6)相互吸引的强磁体二(9),所述嵌块(7)的一侧安装有柔性橡胶垫(10)。
2.根据权利要求1所述的一种机械臂用夹爪,其特征在于:所述安装板(1)上安装有驱动电机(11),所述驱动电机(11)的输出端连接有螺纹杆(12),所述螺纹杆(12)上连接有滑块(13),所述滑块(13)通过螺纹杆(12)的转动进行移动,所述滑块(13)的两端转动连接有驱动臂(14),两所述驱动臂(14)的一端分别转动连接于对应的夹臂(2)上。
3.根据权利要求1所述的一种机械臂用夹爪,其特征在于:所述安装板(1)的侧壁设有支撑柱(15),所述支撑柱(15)的上端安装有连接台(16)。
4.根据权利要求2所述的一种机械臂用夹爪,其特征在于:所述螺纹杆(12)的底端设有防脱块(17)。
5.根据权利要求1所述的一种机械臂用夹爪,其特征在于:所述柔性橡胶垫(10)的一侧设有防滑纹。
技术总结
本技术公开了一种机械臂用夹爪,涉及机械夹爪技术领域,包括安装板,安装板的两侧转动连接有夹臂,夹臂的底端连接有安装块,安装块上安装有设有凹槽,凹槽的开口处设有导向块,导向块的一侧内嵌有强磁体一,凹槽内滑动连接嵌块,嵌块上设有能够插接导向块的通槽,通槽的内壁内嵌有与强磁体一相互吸引的强磁体二,嵌块的一侧安装有柔性橡胶垫。本技术通过将嵌块插接在凹槽内,并将导向块插接在通槽内,随后驱动电机带动螺纹杆转动,使得滑块上移并带动驱动臂驱动夹臂转动,接着两夹臂相向运动并通过橡胶柔性垫夹持目标物,避免损坏目标物,同时嵌块便于更换可满足抓取不同目标物的需求,防滑纹可避免目标物滑落。
技术研发人员:王昊,张家伟,徐继范,侯武俊,戴鹏飞,夏建平,林盛昌
受保护的技术使用者:南通理工学院
技术研发日:20220818
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!