一种基于绳索驱动的变直径仿象鼻连续型机械臂
1.本实用新型涉及机器人领域,尤其是涉及一种基于绳索驱动的变直径仿象鼻连续型机械臂。
背景技术:
2.现代社会中,机械臂的应用十分广泛,能够为人类的生产乃至生活带来便利。随着科技的发展进步,各式各样的机械臂应运而生,其中还包括很多种仿生机械臂。相较于传统机械臂,仿生机械臂在结构上模仿借鉴自然界的各种生物,借助大自然的智慧巧妙地实现一些所需功能。基于绳索驱动的变直径仿象鼻连续型机械臂是为解决传统刚性机械臂自由度数目有限、灵活性较差的问题提出来的,其通过增加冗余关节,使关节空间的维数远大于任务空间维数,使得机械臂可以灵活地实现期望的末端姿态。
3.目前关于象鼻仿生机械臂的研究已经比较丰富,中国专利cn 111085989 a 提到的一种具有多自由度的变刚度仿生象鼻软体手臂,中国专利cn 112692822 a中提到的可实现缠绕运动的线驱动软体机械臂和中国专利cn 111168657 b中提到的一种线驱动连续体柔性机器人,其成本价格和控制难度也都比较高。为了降低成本和简化控制,中国专利cn 114102567 a提出了一种仿象鼻线驱动柔性多功能机械臂,但其机械臂部分较大,运动起来略显笨重。采用绳索的驱动方式,实现了驱动系统与机械臂的分离,有利于减轻机械臂的重量,可以更好的满足狭窄环境下的作业要求。因此,这种机械臂特别适合用作:(1) 复杂狭窄空间内的操作设备,大量的冗余关节可使机械臂具备极强的避障能力,特别适合用作特种机器人,例如用作灾后事故搜索机器人、观测机器人等。(2) 由于模仿了象鼻的外观,其很适合抓取不规则物体,即采用全臂包络方式抓取较大尺寸的不规则物体,其前窄后宽的设计,可使其在承受一定负载的同时牢固地抓取物体。
4.然而,目前仿象鼻机械臂大多为刚性结构,驱动采用液压或电机两种方式,且直接安装在转动关节处,驱动器固定在控制柜中,二者用电缆线进行连接,这样会带来很多缺点: (1) 自由度数目有限,无法实现满足复杂、狭窄等工况下的作业要求;(2) 增加了机械臂的惯性和质量,导致其承载能力受到一定的限制,影响机械臂的精度和响应速度;(3) 机械臂上存在电机等元器件,增加了机械臂的复杂性,成本增大。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供一种结构简单,拥有较多自由度,可以对各关节进行独立调节,使控制更加精确的基于绳索驱动的变直径仿象鼻连续型机械臂,其控制元件集成到控制箱内,不易受到恶劣环境的影响,有助于延长使用寿命,便于拆卸、维护和组装。
6.本实用新型所采用的技术方案是:一种基于绳索驱动的变直径仿象鼻连续型机械臂,包括驱动模块及机械臂模块,所述机械臂模块包括多个串联的关节,所述的关节包括基座圆盘、末端圆盘、若干支撑圆盘、驱动绳组及柔性支撑杆,所述的基座圆盘、末端圆盘、若
干支撑圆盘安装在柔性支撑杆上,且与柔性支撑杆同轴,基座圆盘、末端圆盘设置在柔性支撑杆两端;相邻的两关节中前一关节的后端的基座圆盘与后一关节前端的末端圆盘连接;每个关节的末端圆盘上固接有三个驱动绳,驱动模块包括多个伺服电机,每个伺服电机的输出轴上分别设有绕线盘,多个关节的每个驱动绳分别连接一绕线盘。
7.进一步的,包括三个关节,每个关节的三个驱动绳沿圆周方向均匀布置。
8.进一步的,所述柔性支撑杆采用镍钛合金杆、玻璃纤维杆或碳纤维杆;三个关节段的柔性支撑杆从后端关节至前端关节呈等差数列变细。
9.进一步的,所述驱动模块包括9个伺服电机、机架顶板及机架底板;机架顶板及机架底板平行设置,9个伺服电机底部安装在机架底板上,9个伺服电机顶部安装在机架顶板上,9个伺服电机沿圆周方向均匀布置;所述的伺服电机的输出轴伸出机架顶板并安装有绕线盘,对应于每个绕线盘设有一个过线盘,机架顶板和机架底板上对应于每个过线盘分别设有一个过线孔,驱动绳穿过过线孔和相对应的过线盘与绕线盘连接;所述的机械臂模块后端安装在机架底板上。
10.进一步的,基座圆盘、若干支撑圆盘、末端圆盘等间距安装在柔性支撑杆上,后端的关节的基座圆盘、末端圆盘、支撑圆盘上沿所述圆盘的周向均匀分布有9个过线孔;中间的关节的基座圆盘、末端圆盘、支撑圆盘上沿所述圆盘的周向均匀分布有6个过线孔;前端的关节的基座圆盘、末端圆盘、支撑圆盘上沿所述圆盘的周向均匀分布有3个过线孔。
11.进一步的,关节的基座圆盘的直径、支撑圆盘的直径、末端圆盘的直径从后向前依次呈等差数列减小;相邻的两关节的基座圆盘和末端圆盘的直径相同。
12.进一步的,前端的关节的基座圆盘、末端圆盘、支撑圆盘上的过线孔距柔性支撑杆中心的距离为12mm,中间的关节的基座圆盘、末端圆盘、支撑圆盘上的过线孔距柔性支撑杆中心的距离为15mm,后端的关节的基座圆盘、末端圆盘、支撑圆盘上的过线孔距柔性支撑杆中心的距离为18mm。
13.进一步的,后端关节的柔性支撑杆直径为5mm,中间的关节的柔性支撑杆直径为4mm,前端的关节的柔性支撑杆直径为3mm。
14.进一步的,所有基座圆盘、末端圆盘和支撑圆盘由树脂、聚甲醛或合金材质等轻型坚韧材料3d打印制成。
15.与现有技术相比,本实用新型的有益效果是:
16.本实用新型结构简单,其拥有较多自由度,可以对各关节进行独立调节,使控制更加精确;本实用新型机械臂模块的前部直径小于后部直径,可以极大的减轻关节的重量,而机械臂模块刚度在靠近底座的方向不断增加,提高了机械臂模块的承载能力和抗干扰能力从而进一步增加机械臂的负载能力,有利于实现机械臂模块的高速移动和快速响应;同时本实用新型采用驱动绳驱动,且3组驱动绳成共径向设置,每组驱动绳所在圆半径成等差增大,使得每个关节段的受力更加均匀;同时控制箱舍去了传统的丝杠传动机构,采用双滑轮进行力的换向和传递,改善了驱动绳的传动环境,大大减小了驱动箱的尺寸。
附图说明
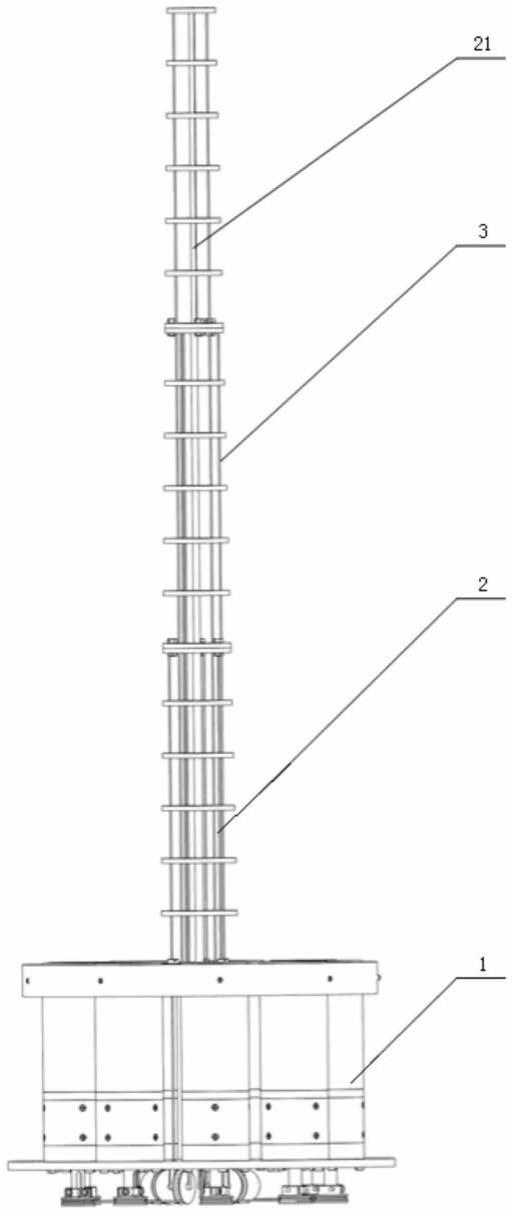
17.图1是本实用新型的整体示意图。
18.图2是本实用新型的驱动模块的示意图。
19.图3是本实用新型的驱动模块的俯视图。
20.图4是本实用新型的机械臂模块的示意图。
21.图5是本实用新型的中间的关节的示意图。
22.图6是本实用新型的相邻关节连接的示意图(卸掉驱动绳)。
23.图7是本实用新型的支撑圆盘的结构示意图。
具体实施方式
24.以下将结合附图对本实用新型的技术方案进行清楚、完整的描述。
25.如图1-7所示,本实用新型包括驱动模块1及机械臂模块2,所述机械臂模块包括3个串联的关节(关节数量不限于3个,可以多于三个,也可以是两个),所述的关节包括基座圆盘24、末端圆盘22、若干支撑圆盘23、驱动绳组及柔性支撑杆21,所述的基座圆盘24、若干支撑圆盘23、末端圆盘22等间距安装在柔性支撑杆21上,且与柔性支撑杆21同轴,基座圆盘24、末端圆盘22设置在柔性支撑杆21两端;相邻的两关节中前一关节的后端的基座圆盘24与后一关节前端的末端圆盘22通过螺栓连接;每个关节的末端圆盘22上固接有三个驱动绳,每个关节的三个驱动绳沿圆周方向均匀布置。驱动绳3固接于关节的末端圆盘22之上,便于对关节的施力。
26.后端的关节的基座圆盘24、末端圆盘22、支撑圆盘23上沿所述圆盘的周向均匀分布有9个过线孔25;中间的关节的基座圆盘24、末端圆盘22、支撑圆盘23上沿所述圆盘的周向均匀分布有6个过线孔25;前端的关节的基座圆盘24、末端圆盘22、支撑圆盘23上沿所述圆盘的周向均匀分布有3个过线孔25。
27.关节的基座圆盘24的直径、支撑圆盘23的直径、末端圆盘22的直径从后向前依次呈等差数列减小;相邻的两关节的基座圆盘24和末端圆盘22的直径相同。前端的关节的基座圆盘24、末端圆盘22、支撑圆盘23上的过线孔25距柔性支撑杆21中心的距离为12mm,中间的关节的基座圆盘24、末端圆盘22、支撑圆盘23上的过线孔25距柔性支撑杆21中心的距离为15mm,后端的关节的基座圆盘24、末端圆盘22、支撑圆盘23上的过线孔25距柔性支撑杆21中心的距离为18mm。由于本实用新型是机械臂模块2,靠近驱动模块1的关节半径大,而远离驱动模块1的关节半径较小,这样可以使靠近驱动模块1的关节段在较小的拉力下产生较大的力矩,使得三个关节段受力更加均匀。
28.所述驱动模块1包括9个伺服电机11、机架顶板14及机架底板15;机架顶板14及机架底板15平行设置,9个伺服电机11底部安装在机架底板15上,9个伺服电机11顶部安装在机架顶板14上,9个伺服电机11沿圆周方向均匀布置;所述的伺服电机11的输出轴伸出机架顶板14并安装有绕线盘12,对应于每个绕线盘12设有一个过线盘13,机架顶板14和机架底板15上对应于每个过线盘13分别设有一个过线孔,驱动绳穿过过线孔和相对应的过线盘13与绕线盘12连接。由于过线盘13的存在,可使驱动绳直接进行90
°
的换向,大大减少了线组排列布置的麻烦,并且使驱动绳所受的摩檫力减小,提高了机械臂的精度并延长了驱动绳的寿命,省去丝杠等传动装置,使得驱动模块整体尺寸大幅缩减,整个装置更加灵活。所述的机械臂模块2后端安装在机架底板15上。9个绕线盘分别与3个关节的9个驱动绳连接。这样随着伺服电机11带动绕线盘12的转动,便可使驱动绳伸长和收缩,进而使关节发生弯曲和旋转。通过多个关节的组合,机械臂便可以实现“s”形弯曲或其他姿态。
29.如图4所示,关节的中心是柔性支撑杆21,可以保持整个机械臂的整体形状并为机械臂的弯曲提供一定的弯曲刚度。整个机械臂的弯曲可以看作每个关节段的弯曲与关节段之间的弯曲相合并,关节段的弯曲主要表现在驱动绳3拉动末端圆盘22从而带动柔性杆21发生一定的弯曲,并使末端圆盘22相对于基座圆盘24发生空间上的偏移,三个关节便可以使机械臂实现360
°
的旋转角度,而直径前小后大的仿象鼻设计结构使得机械臂的前端(即远离驱动模块1的那一端)的弯曲量大于后端(即靠近驱动模块1的那一端),从而机械臂可以实现象鼻向内卷的操作,即可以实现物体的包络抓取。
30.本实用新型末端圆盘22为活动端,基座圆盘24为固定端,关节的转动主要发生在尾端,即活动端在驱动绳的拉动下可相对固定端发生偏转,依靠柔性支撑杆21的弯曲特性可实现单关节两个自由度上的转动。相邻关节的固定端和活动端通过螺栓连接,后端的关节(即最靠近驱动模块1的关节)和机架底板15通过螺栓26固接,实现关节之间的串联,且方便拆装。所有基座圆盘24、末端圆盘22和支撑圆盘23由树脂、聚甲醛或合金材质等轻型坚韧材料3d打印制成,采用薄片且中间镂空设计,进一步减轻其重量。
31.本实用新型的柔性支撑杆21采用镍钛合金杆、玻璃纤维杆或碳纤维杆,穿过圆盘中心孔,支撑整个关节形状和在关节弯曲时提供所需要的弯曲刚度。三个关节段的柔性支撑杆21直径并不相等,从后端关节至前端关节呈等差数列变细,后端关节的柔性支撑杆21直径为5mm,中间的关节的柔性支撑杆21直径为4mm,前端的关节的柔性支撑杆21直径为3mm,使各关节段的弯曲角度由基关节段至末端关节段逐渐变大。
32.本实用新型使用时,具体操作过程如下:本实用新型的三关节可做联合运动以满足狭窄复杂工况下的工作需要,其次三关节也可单独进行弯曲运动。驱动绳3作为驱动力的传递介质,本机械臂的运动均基于驱动绳的拉伸与收缩来完成。绕线盘12通过夹紧装置与伺服电机11相连,过线盘支架固接在机架顶板14之上,过线盘13安装在支架上,并与机架顶板14上的过线孔25一一对应,驱动绳一段缠绕在绕线盘12上,通过过线盘13换向可直接穿过过线孔25与其对应的关节相连接。与后端关节对应的三个电机11分别进行正转与反转,从而带动固接在绕线盘12上的驱动绳进行拉伸与收缩,驱动绳通过过线13盘换向后直接拉动基关节上的末端圆盘22,从而使得基关节的柔性支撑杆21向一侧弯曲,其余两关节保持不动。与上述相同,中间关节以及末端关节所对应的电机同样进行相同的操作,整个机械臂便可以实现向一侧弯曲,或“s”形弯曲。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1