一种电力系统用具有调节功能的机器人手臂的制作方法
1.本实用新型涉及电力系统技术领域,具体为一种电力系统用具有调节功能的机器人手臂。
背景技术:
2.电力系统的主体结构有电源(水电站、火电厂、核电站等发电厂),变电所(升压变电所、负荷中心变电所等),输电、配电线路和负荷中心。各电源点还互相联接以实现不同地区之间的电能交换和调节,从而提高供电的安全性和经济性。输电线路与变电所构成的网络通常称电力网络。电力系统的信息与控制系统由各种检测设备、通信设备、安全保护装置、自动控制装置以及监控自动化、调度自动化系统组成,而在电力系统中的有些操作及过程需要机器人手臂进行代加工来完成。
3.市场上的电力系统机器人手臂在使用中,对于机器人手臂的调节较为笼统,大多还是只存在于对手臂各个关节之间的调节,然而在现在操作状态下,对于机器人手臂的其余调节方式也尤其重要,为此,我们提出一种电力系统用具有调节功能的机器人手臂。
技术实现要素:
4.本实用新型的目的在于提供一种电力系统用具有调节功能的机器人手臂,以解决上述背景技术中提出的对于机器人手臂的调节较为笼统,大多还是只存在于对手臂各个关节之间的调节,然而在现在操作状态下,对于机器人手臂的其余调节方式也尤其重要的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种电力系统用具有调节功能的机器人手臂,包括中装架、位移调节机构、周向调节机构、主体和限位适配机构,所述中装架的中部一侧设置有位移调节机构,且位移调节机构的上方设置有周向调节机构,所述周向调节机构的一侧设置有主体,所述中装架的底部设置有限位适配机构,所述位移调节机构包括第一调节丝杆、第一伺服电机、第一螺纹装件、装配架和第一滑动组件,且第一调节丝杆的一端设置有第一伺服电机,所述第一调节丝杆的一侧周边设置有第一螺纹装件,且第一螺纹装件的上方设置有装配架,所述第一螺纹装件的两侧均设置有第一滑动组件。
6.进一步的,所述装配架通过第一调节丝杆、第一伺服电机、第一螺纹装件与第一滑动组件和中装架构成水平传动结构,且装配架的中部呈凹沉下陷式分布。
7.进一步的,所述周向调节机构包括传动轴、第二伺服电机、联轴传动带和从动轴,且传动轴的中部设置有第二伺服电机,所述传动轴的周边设置有联轴传动带,且联轴传动带的一侧设置有从动轴。
8.进一步的,所述从动轴通过传动轴、第二伺服电机与联轴传动带构成同步传动结构,且从动轴与主体两者之间为固定连接。
9.进一步的,所述限位适配机构包括基座架、第二调节丝杆、第三伺服电机、第二螺纹装件、第二滑动组件、连接件、夹装板和内垫层,且基座架的中部设置有第二调节丝杆,所
述第二调节丝杆的一端设置有第三伺服电机,且第二调节丝杆的一侧周边设置有第二螺纹装件,所述第二螺纹装件的上方设置有第二滑动组件,且第二螺纹装件的一侧固定有连接件,所述连接件的末端连接有夹装板,且夹装板的内侧设置有内垫层。
10.进一步的,所述第二螺纹装件通过第二调节丝杆、第三伺服电机与第二滑动组件和基座架构成传动夹紧结构,且第二螺纹装件、连接件与夹装板三者之间互为固定连接。
11.进一步的,所述夹装板与内垫层两者之间相贴合。
12.与现有技术相比,本实用新型的有益效果是:该电力系统用具有调节功能的机器人手臂机器人手臂主体可利用第一调节丝杆、第一伺服电机、第一螺纹装件及第一滑动组件等相关部件传动部件进行水平方向的螺纹式传动位移作业,如此,可达到调节及控制机器人手臂主体的作业区域范围,范围不局限实用性较高。
13.电力系统用机器人手臂主体可通过传动轴、第二伺服电机与联轴传动带、从动轴等联轴式的组件传动设置,可进行同步式的周向转动操作,配合着位移调节机构的区域调节性,可达到较好的调节效果。
14.在作业中,由于加工台的大小范围不一,可能导致对于机器人手臂的安装较为麻烦,此时人员可先将基座架置放在加工台的上方,随后启动第三伺服电机,使其夹装板可通过第二螺纹装件、第二调节丝杆、第三伺服电机与第二滑动组件的存在进行长度上的调整卡夹作业,以此来达到安装过程中的长度适配性,达到适配不同大小的工位加工台,便携实用。
附图说明
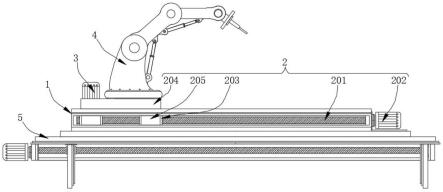
15.图1为本实用新型正面结构示意图;
16.图2为本实用新型周向调节机构俯视结构示意图;
17.图3为本实用新型限位适配机构正面结构示意图;
18.图4为本实用新型限位适配机构局部立体结构示意图。
19.图中:1、中装架;2、位移调节机构;201、第一调节丝杆;202、第一伺服电机;203、第一螺纹装件;204、装配架;205、第一滑动组件;3、周向调节机构;301、传动轴;302、第二伺服电机;303、联轴传动带;304、从动轴;4、主体;5、限位适配机构;501、基座架;502、第二调节丝杆;503、第三伺服电机;504、第二螺纹装件;505、第二滑动组件;506、连接件;507、夹装板;508、内垫层。
具体实施方式
20.如图1所示,一种电力系统用具有调节功能的机器人手臂,包括:中装架1、位移调节机构2、周向调节机构3、主体4和限位适配机构5,中装架1的中部一侧设置有位移调节机构2,且位移调节机构2的上方设置有周向调节机构3,周向调节机构3的一侧设置有主体4,中装架1的底部设置有限位适配机构5,位移调节机构2包括第一调节丝杆201、第一伺服电机202、第一螺纹装件203、装配架204和第一滑动组件205,且第一调节丝杆201的一端设置有第一伺服电机202,第一调节丝杆201的一侧周边设置有第一螺纹装件203,且第一螺纹装件203的上方设置有装配架204,第一螺纹装件203的两侧均设置有第一滑动组件205,装配架204通过第一调节丝杆201、第一伺服电机202、第一螺纹装件203与第一滑动组件205和中
装架1构成水平传动结构,且装配架204的中部呈凹沉下陷式分布,机器人手臂主体4可利用第一调节丝杆201、第一伺服电机202、第一螺纹装件203及第一滑动组件205等相关部件传动部件进行水平方向的螺纹式传动位移作业,如此,可达到调节及控制机器人手臂主体4的作业区域范围,范围不局限实用性较高。
21.如图2所示,一种电力系统用具有调节功能的机器人手臂,周向调节机构3包括传动轴301、第二伺服电机302、联轴传动带303和从动轴304,且传动轴301的中部设置有第二伺服电机302,传动轴301的周边设置有联轴传动带303,且联轴传动带303的一侧设置有从动轴304,从动轴304通过传动轴301、第二伺服电机302与联轴传动带303构成同步传动结构,且从动轴304与主体4两者之间为固定连接,电力系统用机器人手臂主体4可通过传动轴301、第二伺服电机302与联轴传动带303、从动轴304等联轴式的组件传动设置,可进行同步式的周向转动操作,配合着位移调节机构2的区域调节性,可达到较好的调节效果。
22.如图3所示,一种电力系统用具有调节功能的机器人手臂,限位适配机构5包括基座架501、第二调节丝杆502、第三伺服电机503、第二螺纹装件504、第二滑动组件505、连接件506、夹装板507和内垫层508,且基座架501的中部设置有第二调节丝杆502,第二调节丝杆502的一端设置有第三伺服电机503,且第二调节丝杆502的一侧周边设置有第二螺纹装件504,第二螺纹装件504的上方设置有第二滑动组件505,且第二螺纹装件504的一侧固定有连接件506,连接件506的末端连接有夹装板507,第二螺纹装件504通过第二调节丝杆502、第三伺服电机503与第二滑动组件505和基座架501构成传动夹紧结构,且第二螺纹装件504、连接件506与夹装板507三者之间互为固定连接,且夹装板507的内侧设置有内垫层508,夹装板507与内垫层508两者之间相贴合,在作业中,由于加工台的大小范围不一,可能导致对于机器人手臂的安装较为麻烦,此时人员可先将基座架501置放在加工台的上方,随后启动第三伺服电机503,使其夹装板507可通过第二螺纹装件504、第二调节丝杆502、第三伺服电机503与第二滑动组件505的存在进行长度上的调整卡夹作业,以此来达到安装过程中的长度适配性,达到适配不同大小的工位加工台,便携实用。
23.工作原理:对于这类的电力系统用具有调节功能的机器人手臂首先机器人手臂主体4可利用第一调节丝杆201、第一伺服电机202、第一螺纹装件203及第一滑动组件205等相关部件传动部件进行水平方向的螺纹式传动位移作业,如此,可达到调节及控制机器人手臂主体4的作业区域范围,范围不局限实用性较高,并且电力系统用机器人手臂主体4可通过传动轴301、第二伺服电机302与联轴传动带303、从动轴304等联轴式的组件传动设置,可进行同步式的周向转动操作,配合着位移调节机构2的区域调节性,可达到较好的调节效果,最后在作业中,由于加工台的大小范围不一,可能导致对于机器人手臂的安装较为麻烦,此时人员可先将基座架501置放在加工台的上方,随后启动第三伺服电机503,使其夹装板507可通过第二螺纹装件504、第二调节丝杆502、第三伺服电机503与第二滑动组件505的存在进行长度上的调整卡夹作业,以此来达到安装过程中的长度适配性,达到适配不同大小的工位加工台,便携实用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1