一种码垛机器人用的四指手爪的制作方法
1.本实用新型属于包装机器人技术领域,特别涉及一种码垛机器人用的四指手爪。
背景技术:
2.近年来,随着企业生产自动化程度越来越高,码垛机器人的应用越来越普遍,与之配套的码垛机器人手爪也发展迅速,但是现有的机械手爪结构复杂,维护困难,增加生产运营成本。
3.如申请号:2013107188290的实用新型专利所披露的内容,存在构件多,结构相对复杂,导致市场推广难等不足;
4.本申请人提出一种码垛机器人用的四指手爪,本手爪具有结构简单,部件少,造价低,便于市场推广等优点。
技术实现要素:
5.本实用新型的目的在于提供一种码垛机器人用的四指手爪,解决上述的问题。
6.本实用新型所采取的技术方案是:一种码垛机器人用的四指手爪,包括:
7.手爪支架;
8.气缸;和
9.手爪体;
10.其中,所述气缸为两个,分别设置在所述手爪支架的左右两侧,每个所述气缸对应连接一所述手爪体;
11.所述手爪支架具有主支架,所述主支架下端位于前后两侧各设有一人字叉;
12.所述手爪体包括前后方向设置的手爪,两个所述手爪之间通过连接板连成一个整体,在所述连接板靠外一个设有连接两个所述手爪的连接杆;
13.所述所述气缸的活塞杆转动连接到所述连接杆上;
14.所述人字叉的两条腿分别转动连接到所述连接杆上。
15.进一步,两个所述连接杆的圆柱面上设有方便与所述人字叉的两条腿转动连接的铰接片,所述铰接片与所述连接杆固定连接,所述铰接片成对设置。
16.进一步,两个所述连接杆圆柱面上还设有在外圆周上有一部分齿的联动块,所述联动块与所述连接杆固定连接;
17.其中,两个所述联动块上的齿成啮合状态。
18.进一步,所述连接板截面为弧形状。
19.有益效果:
20.本实用新型提供的四指手爪结构简单,运行可靠,维护成本低,降低企业运行成本。
附图说明
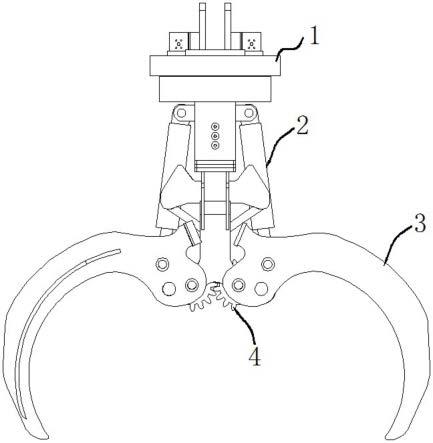
21.图1为本实用新型的正视图;
22.图2为本实用新型的爆炸图;
23.图3为本实用新型的立体图仰视状态;
24.图4为本实用新型的立体图俯视状态;
25.其中:
26.1-手爪支架;
27.2-气缸;
28.3-手爪体;
29.4-联动块;
30.5-铰接片;
31.11-主支架、12-安装块、13-人字叉;
32.21-铰接块;
33.31-手爪、32-连接板、33-连接杆。
具体实施方式
34.为更进一步阐述本实用新型为实现预定实用新型目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本实用新型的具体实施方式、结构、特征及其功效,详细说明如下。
35.请参阅图1至图4,一种码垛机器人用的四指手爪,包括:
36.手爪支架1;
37.气缸2;和
38.手爪体3;
39.其中,所述气缸2为两个,分别设置在所述手爪支架1的左右两侧,每个所述气缸2对应连接一所述手爪体3;
40.所述手爪支架1具有主支架11,所述主支架11下端位于前后两侧各设有一人字叉13;
41.所述手爪体3包括前后方向设置的手爪31,两个所述手爪31之间通过连接板32连成一个整体,在所述连接板32靠外一个设有连接两个所述手爪31的连接杆33;
42.所述所述气缸2的活塞杆转动连接到所述连接杆33上;
43.所述人字叉13的两条腿分别转动连接到所述连接杆33上。
44.本实用新型提供的四指手爪结构简单,运行可靠,维护成本低,降低企业运行成本。
45.请参阅图3和图4,为一实施方式中的整体结构示意图,两个所述连接杆33的圆柱面上设有方便与所述人字叉13的两条腿转动连接的铰接片5,所述铰接片5与所述连接杆33固定连接,所述铰接片5成对设置。
46.请参阅图3和图4,为一实施方式中的整体结构示意图,两个所述连接杆33圆柱面上还设有在外圆周上有一部分齿的联动块4,所述联动块4与所述连接杆33固定连接;
47.其中,两个所述联动块4上的齿成啮合状态,联动块4的加入是可以节省一个气缸
2,当一个气缸2坏了,还能继续使用。
48.请参阅图3和图4,为一实施方式中的整体结构示意图,所述连接板32截面为弧形状,弧形结构便于增大承受力。
49.以上,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭示如上,然而并非用以限定本实用新型,任何本领域技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
技术特征:
1.一种码垛机器人用的四指手爪,其特征在于,包括:手爪支架(1);气缸(2);和手爪体(3);其中,所述气缸(2)为两个,分别设置在所述手爪支架(1)的左右两侧,每个所述气缸(2)对应连接一所述手爪体(3);所述手爪支架(1)具有主支架(11),所述主支架(11)下端位于前后两侧各设有一人字叉(13);所述手爪体(3)包括前后方向设置的手爪(31),两个所述手爪(31)之间通过连接板(32)连成一个整体,在所述连接板(32)靠外一个设有连接两个所述手爪(31)的连接杆(33);所述气缸(2)的活塞杆转动连接到所述连接杆(33)上;所述人字叉(13)的两条腿分别转动连接到所述连接杆(33)上。2.根据权利要求1所述的一种码垛机器人用的四指手爪,其特征在于,两个所述连接杆(33)的圆柱面上设有方便与所述人字叉(13)的两条腿转动连接的铰接片(5),所述铰接片(5)与所述连接杆(33)固定连接,所述铰接片(5)成对设置。3.根据权利要求1所述的一种码垛机器人用的四指手爪,其特征在于,两个所述连接杆(33)圆柱面上还设有在外圆周上有一部分齿的联动块(4),所述联动块(4)与所述连接杆(33)固定连接;其中,两个所述联动块(4)上的齿成啮合状态。4.根据权利要求1所述的一种码垛机器人用的四指手爪,其特征在于,所述连接板(32)截面为弧形状。
技术总结
本实用新型公开了一种码垛机器人用的四指手爪,包括:手爪支架;气缸;和手爪体;其中,气缸为两个,分别设置在手爪支架的左右两侧,每个气缸对应连接一手爪体;手爪支架具有主支架,主支架下端位于前后两侧各设有一人字叉;手爪体包括前后方向设置的手爪,两个手爪之间通过连接板连成一个整体,在连接板靠外一个设有连接两个手爪的连接杆;气缸的活塞杆转动连接到连接杆上;人字叉的两条腿分别转动连接到连接杆上,本实用新型提供的四指手爪结构简单,运行可靠,维护成本低,降低企业运行成本。降低企业运行成本。降低企业运行成本。
技术研发人员:李文涛 周国辉 张明星
受保护的技术使用者:凯麒斯智能装备有限公司
技术研发日:2022.09.01
技术公布日:2022/11/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1