一种多功能智能助老机器人
1.本实用新型专利属于助老机器人领域,尤其涉及一种多功能智能助老机器人。
背景技术:
2.随着我国进入老龄化社会,老年人占比急剧增长,加重了劳动人口与整个社会的负担,给养老产业人力的投入和现有医疗护理体系带来了空前的压力。随着社会的发展和机器人技术的进步,为减轻社会压力,解决老年人养老问题,助老服务机器人应运而生,慢慢走进人们的生活。但现有的助老机器人忽视了不同家居环境和用户的个性化需求,无法突破单一的应用场景、单调的操作任务,与人们期望的能够执行常见复杂任务的助老机器人仍然存在着巨大差距。因此,研究一种多功能智能助老机器人,是现在亟待解决的问题。
技术实现要素:
3.本实用新型的目的在于克服现有产品的不足,提供一种具有辅助锻炼、取物、休息、环境监测于一体的多功能智能助老机器人。
4.为实现上述目的,本实用新型所采用的技术方案为:一种多功能智能助老机器人,包括本体、控制系统、取物装置、移动装置、健身装置、升降装置、休息和储物装置。所述控制系统、取物装置、移动装置、健身装置、休息和储物装置均设置于所述本体上;所述取物装置、移动装置、健身装置、休息和储物装置均与控制系统电连接;所述控制系统包括单片机、视觉系统、控制面板;所述单片机位于本体内部,所述控制面板通过螺栓固定安装在本体上平面,所述视觉系统包括图像传感器和摄像头,所述摄像头安装在所述控制面板下方。
5.进一步地,所述取物装置包括第一机械臂、第二机械臂、取报纸机构,第一机械臂包括一级臂、二级臂、第一感应电机、连接板ⅰ、转轴、第二感应电机、固定板、机械爪,一级臂通过转轴与第二感应电机相连,可以360
°
旋转,第二感应电机通过螺栓固定在所述本体内部,二级臂通过螺栓与一级臂相连,第一感应电机安装在二级臂末端的固定板上,固定板通过螺栓与二级臂相连,连接板ⅰ安装在第一感应电机主轴上,机械爪通过销轴与连接板ⅰ铰接,第二机械臂与第一机械臂结构相同。
6.进一步地,所述取报纸机构包括防滑滚轮、活塞杆、液压缸、固定架。
7.进一步地,所述固定架通过螺栓固定在所述本体上,所述液压缸通过销轴与固定架铰接,实现所述取报纸机构的旋转,防滑滚轮通过销轴与液压缸铰接。
8.进一步地,所述移动装置包括步进电机、全向轮、底电机板、支撑柱、定位模块、红外避障传感器,定位模块位于所述本体内部,红外避障传感器安装在所述摄像头下方,所述本体底部设有4个用于运动的全向轮,全向轮与步进电机输出轴紧固连接,步进电机通过底电机板固定在所述本体下方,并与所述单片机相连接,步进电机的转动由所述单片机的程序控制脉冲来实现,由此控制助老机器人的行走。
9.进一步地,所述健身装置包括健身圆盘、固定支架、磁吸装置、锻炼扶手、压力传感器、连接板ⅱ、中心轴。
10.进一步地,所述固定支架通过螺栓固定在所述健身圆盘下方,支撑老人锻炼,所述健身圆盘通过螺栓与连接板ⅱ相接,所述连接板ⅱ通过中心轴与所述本体相连,可使得健身圆盘 90
°
旋转,磁吸装置分别安装在所述本体和健身圆盘上,通过电极控制,当通正电压时,所述健身圆盘会与机身相吸,通负压时,所述健身圆盘会打开,所述压力传感器安装在健身圆盘内部,与所述单片机通过电连接,所述锻炼扶手安装在健身圆盘的同侧上方,通过销轴铰接安装在所述本体上。
11.进一步地,所述升降装置包括第三感应电机、中心齿轮、第一齿轮、第二齿轮、滚珠丝杠、十字固定架、固定盘。
12.进一步地,所述固定盘通过螺栓连接固定在所述本体上,所述第三感应电机固定安装在所述本体内部,所述中心齿轮与第三感应电机输出轴紧固连接,所述中心齿轮与第一齿轮啮合,所述第一齿轮固定在固定盘上,所述第二齿轮与第一齿轮啮合,所述第二齿轮通过焊接与滚珠丝杠相连,所述滚珠丝杠顶端通过十字固定架来控制定位。
13.进一步地,所述休息和储物装置包括座椅和储物柜,座椅包括连杆、三角支架、折叠座椅、竖直支架、坐垫,座椅和储物柜安装在所述本体的同侧下方。
14.与现有技术相比,本实用新型的有益效果如下:
15.1.本实用新型的取物装置和移动装置都与单片机相连,通过控制系统可驱动取物装置和移动装置实现自动拿取物品动作,在拿取物品时可以自动调节伸缩量,且取物装置采用双机械臂结构,可以能够有效保证设备在取物时的稳定性,方便老人的居家生活。
16.2.本实用新型充分应用了一机多功能化的思想,将控制系统、取物装置、移动装置、健身装置、升降装置、休息和储物装置安装在同一设备上,使设备能满足更多元化的需求,具有更强的实用性。
17.3.本实用新型对设备结构进行模块化设计,设备在使用过程中出现损坏,可只拆卸这一部分进行替换,减少了不必要的费用。
18.4.本实用新型的车轮为全向轮,具有移动灵活、适用范围广的优点,每个全向轮都有单独的电机驱动,通过对步进电机施加不同的速度,可以控制任意方向旋转,也可实现零半径旋转,使设备具有良好的机动性。
附图说明
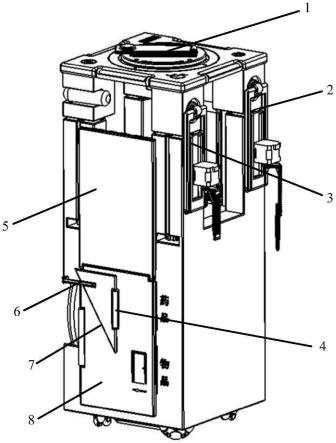
19.图1为本实用新型整体结构示意图;
20.图2为本实用新型整体结构后视图;
21.图3为本实用新型机械臂示意图;
22.图4为本实用新型取报纸机构示意图;
23.图5为本实用新型移动装置示意图;
24.图6为本实用新型健身装置示意图;
25.图7为本实用新型升降装置示意图;
26.图中零件名称与附图编号的对应关系为:
27.1-控制面板;2-第一机械臂;3-第二机械臂;4-连杆;5-折叠座椅;6-竖直支架;7-三角支架;8-储物柜;9-升降装置;10-取报纸机构;11-健身装置;12-本体;13-摄像头;14-充电接口;15-坐垫;16-移动装置;31-一级臂;32-二级臂;33-第二感应电机;34-连接板ⅰ;
35
‑ꢀ
转轴;36-第一感应电机;37-固定板;38-销轴;39-机械爪;40-第一感应电机主轴;91-十字固定架;92-滚珠丝杠;93-第一齿轮;94-第二齿轮;95-固定盘;96-中心齿轮;97;第三感应电机;101-防滑滚轮;102-固定架;103-液压缸;104-活塞杆;111-锻炼扶手;112-健身圆盘;113-连接板ⅱ;114-中心轴;115-固定支架;161-全向轮;162-底电机板;163-步进电机; 164-支撑柱;
具体实施方式:
28.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
29.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
30.在本技术中,术语“上”、“下”、“内”、“中”、“外”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系。这些术语主要是为了更好地描述本技术及其实施例,并非用于限定所指示的装置、元件或组成部分必须具有特定方位,或以特定方位进行构造和操作。
31.并且,上述部分术语除了可以用于表示方位或位置关系以外,还可能用于表示其他含义,例如术语“上”在某些情况下也可能用于表示某种依附关系或连接关系。对于本领域普通技术人员而言,可以根据具体情况理解这些术语在本技术中的具体含义。
32.此外,术语“设置”、“连接”、“固定”应做广义理解。例如,“连接”可以是固定连接,可拆卸连接,或整体式构造;可以是机械连接,或电连接;可以是直接相连,或者是通过中间媒介间接相连,又或者是两个装置、元件或组成部分之间内部的连通。对于本领域普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
33.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
34.一种多功能智能助老机器人,它包括本体12、控制系统、取物装置、移动装置16、健身装置11、升降装置9、休息和储物装置。所述控制系统、取物装置、移动装置、健身装置、休息和储物装置均设置于所述本体上;所述取物装置、移动装置、健身装置、休息和储物装置均与控制系统电连接;所述控制系统包括单片机、视觉系统、控制面板1;所述单片机位于本体内部,所述控制面板1通过螺栓固定安装在本体12上平面,所述视觉系统包括图像传感器和摄像头13,所述摄像头13安装在所述控制面板1下方。
35.所述取物装置包括第一机械臂2、第二机械臂3、取报纸机构10,第一机械臂2包括一级臂31、二级臂32、第一感应电机33、连接板ⅰ34、转轴35、第二感应电机36、固定板37、机
械爪39,一级臂31通过转轴与第二感应电机36相连,可以全方位旋转,第二感应电机36 通过螺栓固定在所述本体12内部,二级臂32通过螺栓与一级臂31相连,第一感应电机33 安装在二级臂32末端的固定板37上,固定板37通过螺栓与二级臂32相连,连接板ⅰ34安装在第一感应电机主轴40上,机械爪39通过销轴与连接板ⅰ34铰接,可以实现全方位旋转,第二机械臂3与第一机械臂2结构相同。
36.所述取报纸机构10包括防滑滚轮101、固定架102、液压缸103、活塞杆104。
37.所述固定架102通过螺栓固定在所述本体12上,所述液压缸103通过销轴与固定架102 铰接,实现所述取报纸机构10的旋转,防滑滚轮101通过销轴与液压缸103铰接。
38.所述移动装置16包括步进电机163、全向轮161、底电机板162、支撑柱164、定位模块、红外避障传感器,定位模块位于所述本体12内部,红外避障传感器安装在所述摄像头13下方,所述本体底部设有4个用于运动的全向轮161,全向轮161与步进电机163输出轴紧固连接,步进电机163通过底电机板162固定在所述本体12下方,并与所述单片机相连接,步进电机163的转动由所述单片机的程序控制脉冲来实现,由此控制助老机器人的行走。
39.所述健身装置11包括健身圆盘112、固定支架115、磁吸装置、锻炼扶手111、压力传感器、连接板ⅱ113、中心轴114。
40.所述固定支架115通过螺栓固定在所述健身圆盘112下方,支撑老人锻炼,所述健身圆盘112通过螺栓与连接板ⅱ113相接,所述连接板ⅱ113通过中心轴114与所述本体12相连,可使得健身圆盘112 90
°
旋转,磁吸装置分别安装在所述本体12和健身圆盘112上,通过电极控制,当通正电压时,所述健身圆盘112会与机身相吸,通负压时,所述健身圆盘112 会打开,所述压力传感器安装在健身圆盘112内部,与所述单片机通过电连接,所述锻炼扶手111安装在健身圆盘112的同侧上方,通过销轴铰接安装在所述本体12上。
41.所述升降装置包括十字固定架91、滚珠丝杠92、第一齿轮93、第二齿轮94、固定盘95、中心齿轮96、第三感应电机97。
42.所述固定盘95通过螺栓连接固定在所述本体12上,所述第三感应电机97固定安装在所述本体12内部,所述中心齿轮96与第三感应电机97输出轴紧固连接,所述中心齿轮96与第一齿轮93啮合,所述第一齿轮93固定在固定盘95上,所述第二齿轮94与第一齿轮93啮合,所述第二齿轮94通过焊接与滚珠丝杠92相连,所述滚珠丝杠92顶端通过十字固定架 91来控制定位。
43.所述休息和储物装置包括座椅和储物柜8,座椅包括连杆4、三角支架7、折叠座椅5、竖直支架6、坐垫15,座椅和储物柜8安装在所述本体12的同侧下方。
44.工作原理:本实施例的一种适用于老年人的多功能机器人,按下电源总开关后,机器人开始工作。首先,机器上半身摄像头13会打开,检测自己的机身位置,物品的位置,规划移动路径。老年人可以通过操控控制面板1来控制机器,机器人具有休息模式、工作模式和健身模式,工作模式打开,单片机通过控制第一感应电机36、第二感应电机33来驱动第一机械臂2、第二机械臂3完成物品的夹取任务,还可以通过取报纸机构拿取纸质类报纸、书籍等。健身模式打开,机器人的健身圆盘112打开,固定支架115打开保证健身圆盘112与地面平行,高度适中,可绕中心轴114旋转,当压力传感器检测到老人站在上面时,机器人会展开锻炼扶手111,以供老人扶持。休息模式打开,带有坐垫15的折叠座椅5打开,并且有竖直支架6和三角支架7支撑。机身底部带有四个步进电机163并分别驱动着四个全向轮161 任意
角度和适当的速度移动。不同轮子的不同速度驱动,使得转动速度也不同。并且在转弯时,不同轮子的不同速度可以使得两侧驱动车轮做纯滚动运动,也提高了效率和使用寿命。
45.虽然本实用新型所揭示的实施方式如上,但其内容只是为了便于理解本实用新型的技术方案而采用的实施方式,并非用于限定本实用新型。任何本实用新型所属技术领域内的技术人员,在不脱离本实用新型所揭示的核心技术方案的前提下,可以在实施的形式和细节上做任何修改与变化,但本实用新型所限定的保护范围,仍须以所附的权利要求书限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1