一种自动送料机械手的制作方法
本技术涉及机械手,具体为一种自动送料机械手。
背景技术:
1、机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
2、如公开号为cn207014355u,一种上料机械手,它包括凸轮轴,用于向凸轮机构传输动力,以带动凸轮机构转动;凸轮机构,由凸轮轴驱动,所述凸轮机构包括上下移动凸轮和前后移动凸轮;机械手爪;动力臂机构,包括前后移动臂和上下移动臂,所述前后移动臂的一端与所述机械手爪固连,另一端通过第一滑头与所述前后移动凸轮相连,本实用新型提供一种上料机械手,它能够实现送料的机械化和自动化,简化结构,提高送料效率,降低生产过程中人工操作的危险性,但是只能对物料进行转移,不能转动调整物料的角度和方向,送料操作不够精准,增加了使用者操作难度。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种自动送料机械手,具备对物料角度调节等优点,解决了现有的机械手只能对物料进行转移,不能转动调整物料的角度和方向,送料操作不够精准,增加了使用者操作难度的问题。
3、(二)技术方案
4、为实现上述目的,本实用新型提供如下技术方案:一种自动送料机械手,包括支撑架,所述支撑架的顶部滑动连接有固定板,所述固定板的一侧设置有上料机构;
5、所述上料机构包括移动板、转盘、第一电动伸缩杆、安装板和吸盘,所述移动板滑动连接于固定板的内腔,所述转盘的顶部与移动板转动连接,所述转盘的底部与第一电动伸缩杆的顶部固定连接,所述第一电动伸缩杆的输出端与安装板的顶部固定连接,所述吸盘固定连接于安装板的底部。
6、优选的,所述固定板的内腔转动连接有螺纹杆,所述螺纹杆的数量为两个,所述螺纹杆的表面与移动板的内壁螺纹连接,所述固定板的一侧设置有第一电机,所述第一电机的输出端贯穿至固定板的内腔并与其中一个螺纹杆固定连接。
7、优选的,所述移动板的顶部固定连接有第二电机,所述第二电机的输出端贯穿移动板并与转盘的顶部固定连接。
8、优选的,所述安装板的底部固定连接有第二电动伸缩杆,所述第二电动伸缩杆的输出端固定连接有推板。
9、通过设置第二电动伸缩杆和推板的配合使用,在进行下料的时候,利用外界控制开关启动第二电动伸缩杆,从而达到带动推板进行移动的效果,使得推板对物料进行推动,从而进行下料。
10、优选的,所述螺纹杆的一端贯穿至固定板的一侧并固定连接有传动轴,所述传动轴的表面套设有传动带,两个所述传动轴通过传动带传动连接。
11、优选的,所述固定板的内壁开设有导向槽,所述导向槽的内腔滑动连接有导向块,所述导向块的一侧与移动板固定连接。
12、通过设置导向槽和导向块的配合使用,在移动板进行移动的时候,移动板带动导向块在导向槽的内腔进行移动,从而达到对移动板进行导向的效果。
13、优选的,所述支撑架的内壁固定连接有第三电动伸缩杆,所述第三电动伸缩杆的输出端与固定板固定连接。
14、与现有技术相比,本实用新型提供了一种自动送料机械手,具备以下有益效果:
15、1、该自动送料机械手,通过设置上料机构,在对物料进行上料的时候,将固定板移动至物料的顶部,利用外界控制开关启动第一电动伸缩杆,通过第一电动伸缩杆带动安装板向下进行移动,使得安装板带动吸盘向下进行移动,从而达到对物料进行吸附的效果,此时对固定板进行移动,达到上料的效果,且可以对转盘进行旋转,从而调节物料的角度。
16、2、该自动送料机械手,通过设置螺纹杆和第一电机的配合使用,在对移动板位置进行调节的时候,利用外界控制开关启动第一电机,通过第一电机带动螺纹杆进行旋转,由于螺纹杆与移动板螺纹连接,从而达到带动移动板进行移动的效果。
技术特征:
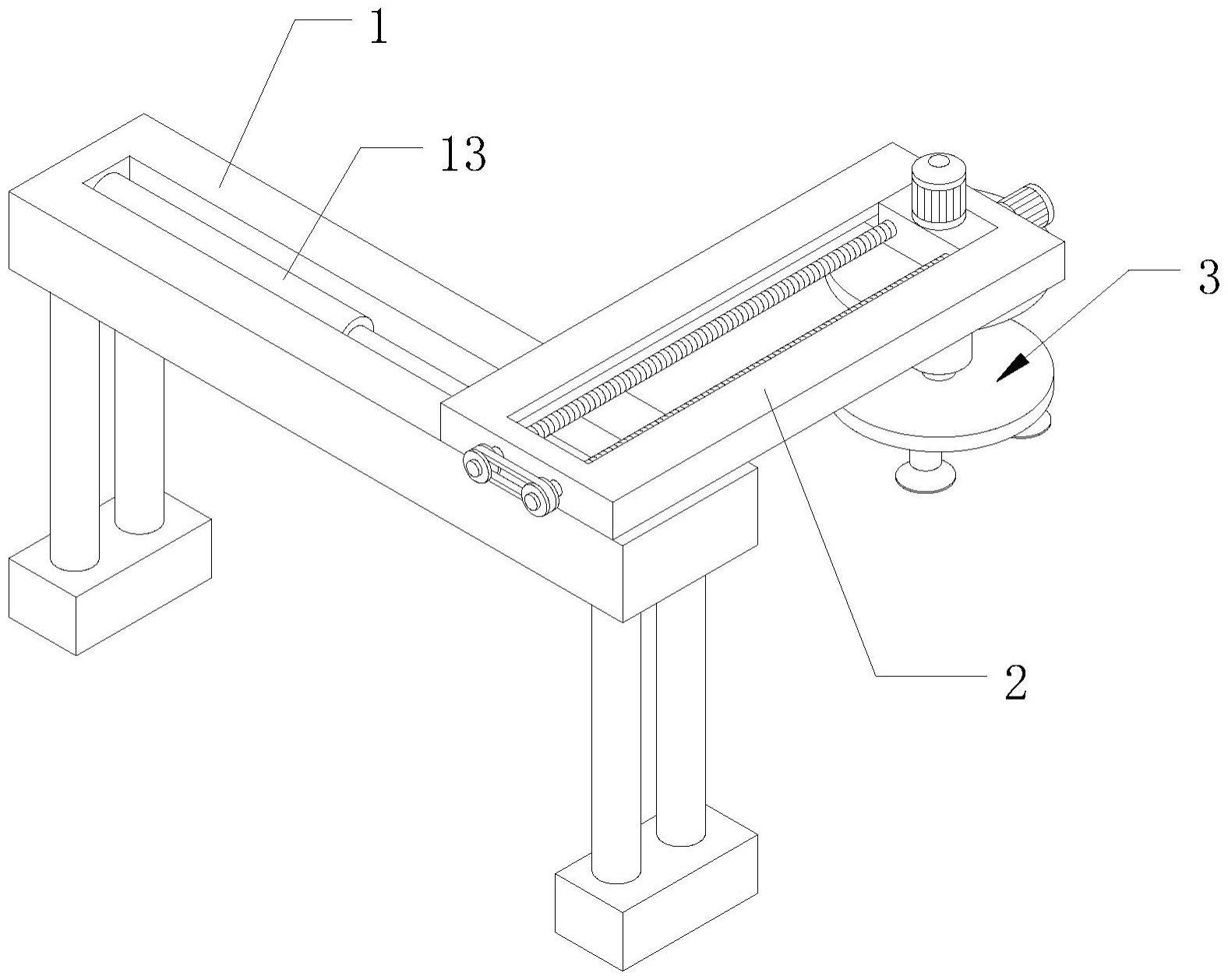
1.一种自动送料机械手,包括支撑架(1),其特征在于:所述支撑架(1)的顶部滑动连接有固定板(2),所述固定板(2)的一侧设置有上料机构(3);
2.根据权利要求1所述的一种自动送料机械手,其特征在于:所述固定板(2)的内腔转动连接有螺纹杆(4),所述螺纹杆(4)的数量为两个,所述螺纹杆(4)的表面与移动板(301)的内壁螺纹连接,所述固定板(2)的一侧设置有第一电机(5),所述第一电机(5)的输出端贯穿至固定板(2)的内腔并与其中一个螺纹杆(4)固定连接。
3.根据权利要求1所述的一种自动送料机械手,其特征在于:所述移动板(301)的顶部固定连接有第二电机(6),所述第二电机(6)的输出端贯穿移动板(301)并与转盘(302)的顶部固定连接。
4.根据权利要求1所述的一种自动送料机械手,其特征在于:所述安装板(304)的底部固定连接有第二电动伸缩杆(7),所述第二电动伸缩杆(7)的输出端固定连接有推板(8)。
5.根据权利要求2所述的一种自动送料机械手,其特征在于:所述螺纹杆(4)的一端贯穿至固定板(2)的一侧并固定连接有传动轴(9),所述传动轴(9)的表面套设有传动带(10),两个所述传动轴(9)通过传动带(10)传动连接。
6.根据权利要求1所述的一种自动送料机械手,其特征在于:所述固定板(2)的内壁开设有导向槽(11),所述导向槽(11)的内腔滑动连接有导向块(12),所述导向块(12)的一侧与移动板(301)固定连接。
7.根据权利要求1所述的一种自动送料机械手,其特征在于:所述支撑架(1)的内壁固定连接有第三电动伸缩杆(13),所述第三电动伸缩杆(13)的输出端与固定板(2)固定连接。
技术总结
本技术涉及机械手技术领域,且公开了一种自动送料机械手,包括支撑架,所述支撑架的顶部滑动连接有固定板,所述固定板的一侧设置有上料机构;所述上料机构包括移动板、转盘、第一电动伸缩杆、安装板和吸盘,所述移动板滑动连接于固定板的内腔,所述转盘的顶部与移动板转动连接,所述转盘的底部与第一电动伸缩杆的顶部固定连接,所述第一电动伸缩杆的输出端与安装板的顶部固定连接,所述吸盘固定连接于安装板的底部,所述固定板的内腔转动连接有螺纹杆。该自动送料机械手,解决了现有的机械手只能对物料进行转移,不能转动调整物料的角度和方向,送料操作不够精准,增加了使用者操作难度的问题。
技术研发人员:蒋学春,周敬钧
受保护的技术使用者:深圳市众鼎智能装备有限公司
技术研发日:20220913
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!