一种球形机器人运动平衡器
本技术属于球形机器人的,具体涉及一种球形机器人运动平衡器。
背景技术:
1、球形机器人运动平衡器是一种基于球形机器人的运动方式结构的创新与优化。当今球形机器人因其结构的特殊性,具有可适应多种环境、节能、效率高等优势。但因其结构原因,球形机器人在运动过程中平稳性较差,会发生左右倾倒,前后晃动,越障能力严重不足等情况。
技术实现思路
1、本实用新型的目的在于针对现有技术中的上述不足,提供一种球形机器人运动平衡器,以解决传统球形机器人发生左右倾倒,前后晃动的问题。
2、为达到上述目的,本实用新型采取的技术方案是:
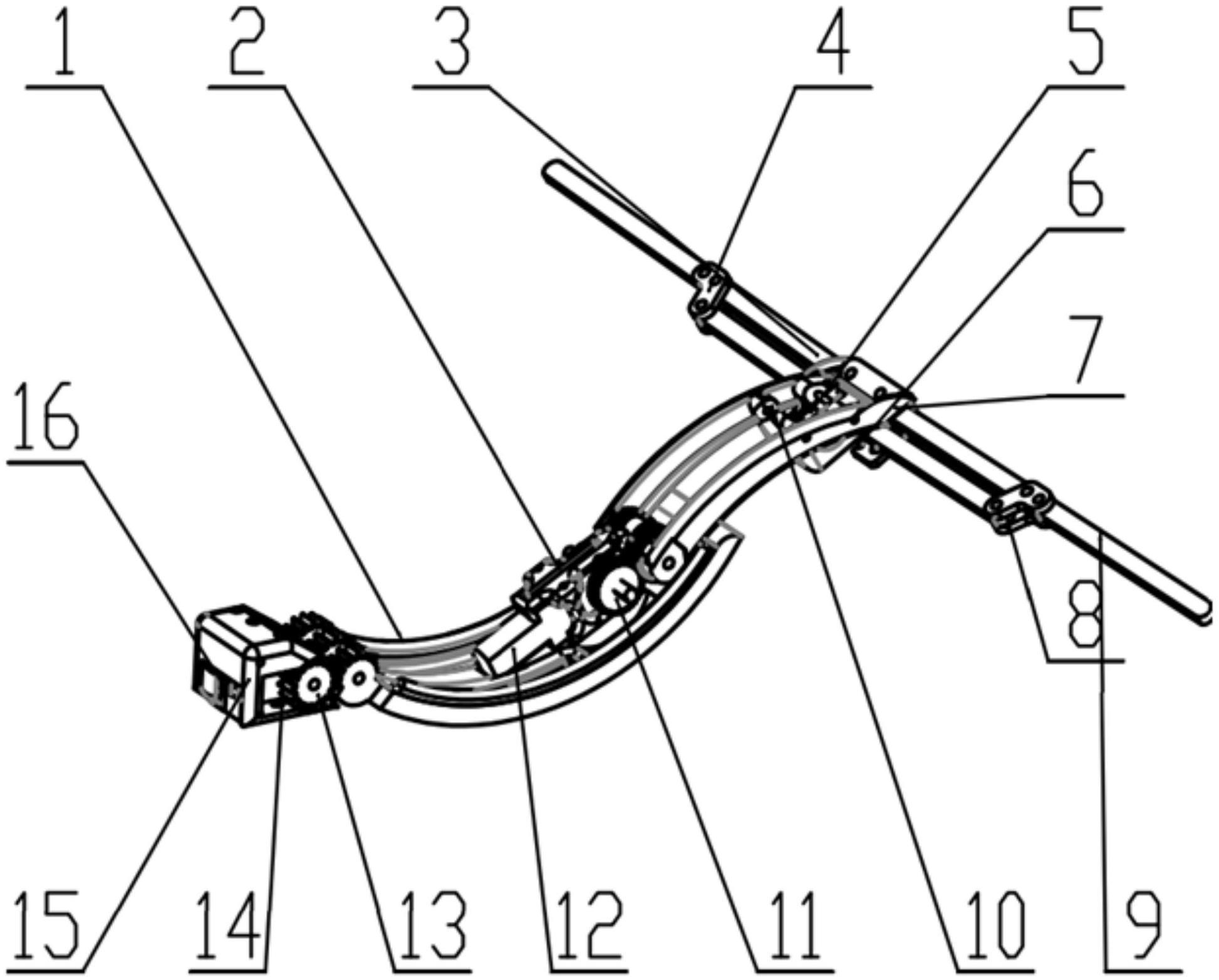
3、一种球形机器人运动平衡器,其包括支撑杆和支地架;支撑杆包括第一支撑和第二支撑;第一支撑一端与球形机器人转动连接,第一支撑另一端与第二支撑转动相连;第二支撑上的支撑远端与支地架相连。
4、进一步地,第一支撑上靠近球形机器人的一端上设有舵机固定架;舵机固定架内设有舵机,舵机横平固定在舵机固定架的预留槽内;舵机的转轴与舵机法兰盘连接,舵机法兰盘与第一齿轮相连;第一齿轮与位于第一支撑上的第二齿轮啮合相连。
5、进一步地,第一齿轮通过其表面开设的过孔与舵机法兰盘固定连接,第一齿轮随所述舵机转动而转动。
6、进一步地,第一支撑上远离球形机器人的一端上设有蜗杆减速电机;蜗杆减速电机的转轴上设有圆柱齿轮,圆柱齿轮与位于第二支撑上的第三齿轮啮合相连。
7、进一步地,蜗杆减速电机被电机盖中部通过螺钉固定在第一支撑预留的电机槽内。
8、进一步地,第二支撑上开设的过孔通过销钉可转动的固定在第一支撑开设的过孔上。
9、进一步地,支地架包括两个小电机、两根链接杆、两根平衡杆和两根第二段平衡杆;两个小电机通过伸展电机盖固定在支撑远端上;两根链接杆被支撑远端和伸展电机盖限制在小电机的转轴上;两根平衡杆一端通过销钉与伸展盖板转动相连,其另一端与链接件转动连接;两根第二段平衡杆通过链接件与平衡杆和链接杆转动相连。
10、本实用新型提供的球形机器人运动平衡器,具有以下有益效果:
11、1、本实用新型通过第一支撑和第二支撑的旋转作用,以实现球形机器人重心的和方向的调整;且配合支地架的作业,可进行收缩状态与展开状态转换,进而可有效解决传统球形机器人发生左右倾倒,前后晃动的问题。
12、2、本实用新型针对球形机器人运动不平稳的问题进行了改进,当平衡器展开时,平衡器末端支地架与地面接触,维持整个球形机器人处于平稳运动,避免球形机器人运动发生左右晃动,提升了球形机器人的稳定性。
13、3、本实用新型也可通过平衡器的展开状态,当球形机器人在需要越障时平衡器可以提供一个支点作用,支撑球形机器人翻越障碍。
技术特征:
1.一种球形机器人运动平衡器,其特征在于:包括支撑杆和支地架;所述支撑杆包括第一支撑和第二支撑;所述第一支撑一端与球形机器人转动连接,第一支撑另一端与第二支撑转动相连;所述第二支撑上的支撑远端与支地架相连。
2.根据权利要求1所述的球形机器人运动平衡器,其特征在于:所述第一支撑上靠近球形机器人的一端上设有舵机固定架;所述舵机固定架内设有舵机,舵机横平固定在舵机固定架的预留槽内;所述舵机的转轴与舵机法兰盘连接,舵机法兰盘与第一齿轮相连;所述第一齿轮与位于第一支撑上的第二齿轮啮合相连。
3.根据权利要求2所述的球形机器人运动平衡器,其特征在于:所述第一齿轮通过其表面开设的过孔与舵机法兰盘固定连接,所述第一齿轮随所述舵机转动而转动。
4.根据权利要求1所述的球形机器人运动平衡器,其特征在于:所述第一支撑上远离球形机器人的一端上设有蜗杆减速电机;所述蜗杆减速电机的转轴上设有圆柱齿轮,圆柱齿轮与位于第二支撑上的第三齿轮啮合相连。
5.根据权利要求4所述的球形机器人运动平衡器,其特征在于:所述蜗杆减速电机被电机盖中部通过螺钉固定在第一支撑预留的电机槽内。
6.根据权利要求1所述的球形机器人运动平衡器,其特征在于:所述第二支撑上开设的过孔通过销钉可转动的固定在第一支撑开设的过孔上。
7.根据权利要求1所述的球形机器人运动平衡器,其特征在于:所述支地架包括两个小电机、两根链接杆、两根平衡杆和两根第二段平衡杆;两个小电机通过伸展电机盖固定在支撑远端上;两根链接杆被支撑远端和伸展电机盖限制在小电机的转轴上;两根平衡杆一端通过销钉与伸展盖板转动相连,其另一端与链接件转动连接;两根所述第二段平衡杆通过链接件与平衡杆和链接杆转动相连。
技术总结
本技术公开了一种球形机器人运动平衡器,包括支撑杆和支地架;支撑杆包括第一支撑和第二支撑;第一支撑一端与球形机器人转动连接,第一支撑另一端与第二支撑转动相连;第二支撑上的支撑远端与支地架相连。本技术通过第一支撑和第二支撑的旋转作用,以实现球形机器人重心的和方向的调整;且配合支地架的作业,可进行收缩状态与展开状态转换及完成辅助越障任务,进而可有效解决传统球形机器人发生左右倾倒,前后晃动的问题。
技术研发人员:罗萌萌,霍建文,李瑞麟,张立红,张予,李旭中,王柳斌,杨瑞林,吴迅
受保护的技术使用者:西南科技大学
技术研发日:20220927
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!