一种桁架机器人的可调滑轮机构的制作方法
1.本实用新型涉及桁架机器人技术领域,尤其是涉及一种桁架机器人的可调滑轮机构。
背景技术:
2.桁架机器人要进行两个轴向或三个轴向的运动,各梁体和支架的相互运动会设置滑轨,从而稳定的实现移动,传统的滑轨需要在端部进行套设安装,并且需要频繁的补充润滑剂,从而提高滑移的顺畅度,避免结构间长期使用的磨损,或者避免为驱动机构增加负担;如果梁体和支架之间的滑移结构能够优化,将能够提高结构间拆装和使用的便利性,并且延长使用寿命。
技术实现要素:
3.本实用新型的目的是克服现有技术的不足,提供一种桁架机器人的可调滑轮机构,通过滚动的方式进行结构间的相对移动,磨损更小便于长期使用,通过可调的方式便于进行拆装以及滑移顺畅度的调节。
4.本实用新型采用以下技术方案:一种桁架机器人的可调滑轮机构,包括支架,支架的前部左右两侧设置有若干个滑轮,两侧的滑轮对两者之间的结构进行夹持并在相对上下位移时进行滚动,滑轮分为固定侧和调节侧,固定侧滑轮的转轴在支架上固定设置,调节侧滑轮的转轴通过滑移孔设置在支架上,滑移孔中的转轴通过调整横向位置,进而调整两侧滑轮的间距,且转轴通过配合第一紧固件抵触于支架上时进行位置的锁定。
5.作为一种改进,两侧的滑轮的数量设置为至少两个,且至少两个滑轮在各自的两侧上下排列。
6.作为一种改进,调节侧滑轮的转轴后部由一连杆进行连接,第一紧固件通过配合转轴抵触连杆和支架进行位置的锁定,若干转轴通过连杆进行同步调整。
7.作为一种改进,支架上对应连杆的外侧还设置有第二紧固件,第二紧固件在抵住连杆外侧时限制连杆的向外运动。
8.作为一种改进,支架上设置有安装块,第二紧固件为螺栓,第二紧固件横向旋于安装块上,第二紧固件旋向连杆进行抵触限制连杆的向外运动。
9.作为一种改进,支架上对应第一紧固件的外侧还设置有第二紧固件,第二紧固件在抵住第一紧固件外侧时限制第一紧固件的向外运动。
10.作为一种改进,支架上设置有安装块,第二紧固件为螺栓,第二紧固件横向旋于安装块上,第二紧固件旋向第一紧固件进行抵触限制第一紧固件的向外运动。
11.本实用新型的有益效果:依靠两侧设置的滑轮对两者之间的竖梁进行夹持并在相对上下位移时进行滚动,进而由滚动摩擦代替滑动摩擦,令摩擦减少从而更加的耐用,无需频繁的补充润滑剂,减少停机维护的时间;通过滑轮宽度可调的方式,能够便于支架和竖梁进行拆装,以及可以根据需要调整滑轮和竖梁的松紧程度,从而对滑移顺畅度进行调节满
足需要。
附图说明
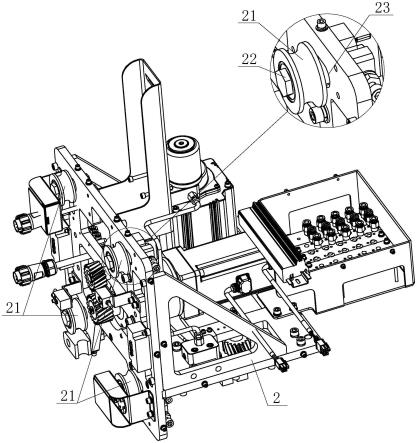
12.图1是本实用新型的立体结构示意图以及局部放大图一。
13.图2是本实用新型的立体结构示意图以及局部放大图二。
具体实施方式
14.以下结合附图对本实用新型的具体实施例做详细说明。
15.如图1、2所示,为本实用新型桁架机器人的可调滑轮机构的一种具体实施例。该实施例包括支架2,支架2的前部左右两侧设置有若干个滑轮21,两侧的滑轮21对两者之间的结构进行夹持并在相对上下位移时进行滚动,滑轮21分为固定侧和调节侧,固定侧滑轮21的转轴22在支架2上固定设置,调节侧滑轮21的转轴22通过滑移孔23设置在支架2上,滑移孔23中的转轴22通过调整横向位置,进而调整两侧滑轮21的间距,且转轴22通过配合第一紧固件31抵触于支架2上时进行位置的锁定。
16.本实用新型在使用时,支架2上设置传动结构,竖梁(图中未示出)安装于支架2前部,两侧的滑轮21对竖梁进行夹持,在传动结构进行工作时驱动竖梁进行上下位移,两侧由滑轮21进行滚动支撑以及限位,传动结构具体可采用齿轮和齿条的方式实现驱动。在竖梁进行上下移动时,滑轮21直接在竖梁上或者竖梁上设置的轨道上滚动,进而相比于传统滑动摩擦的轨道机构,滚动的方式更加的顺滑,摩擦力大大降低,有利于机构的长期使用,更不容易损坏;在拆装时,将调节侧的滑轮21松懈,滑轮21、转轴22可移动至最外侧,令调节侧和固定侧的滑轮21之间的间距拉大,便于竖梁或轨道的拆装,在安装完成后,将调节侧的滑轮21和转轴22内移至两侧滑轮21良好的夹持竖梁或轨道,然后锁定第一紧固件31,即可完成结构的安装;其安装更加的灵活便捷,并可以根据需要调整滑轮21和竖梁的松紧程度,从而对滑移顺畅度进行调节满足需要。滑移孔23具体设置为横置的腰型孔,其宽度即为转轴22和滑轮21能够调节的宽度距离,第一紧固件31具体设置为螺母,转轴22上可设置螺纹,通过螺母旋入转轴22的螺纹,令转轴22和第一紧固件31抵触于支架2上实现位置锁定,滑轮21自身在转轴22旋转实现功能。
17.作为一种改进的具体实施方式,两侧的滑轮21的数量设置为至少两个,且至少两个滑轮21在各自的两侧上下排列。
18.如图1所示,以左右两个滑轮21,形成左右各自的夹持面,可良好的夹持中部的竖梁,能够良好的保持竖梁上下移动时的结构稳定性,其为成本最优的选择;而根据需要例如进一步增加结构强度和稳定性,可设置数量更多的滑轮21,满足具体需要。
19.作为一种改进的具体实施方式,调节侧滑轮21的转轴22后部由一连杆4进行连接,第一紧固件31通过配合转轴22抵触连杆4和支架2进行位置的锁定,若干转轴22通过连杆4进行同步调整。
20.如图2所示,通过设置连杆4,可以同步调整若干个转轴22,更加的方便,并且在对各个位置的第一紧固件31进行锁定后,连杆4可以对各个位置产生连锁的锁定作用,令结构更加的稳定,就算出现意外而使某一位置的第一紧固件31松动,剩余位置的第一紧固件31连同连杆4也可以对整体调节侧的滑轮21提供锁定,提高整体使用的安全性。
21.作为一种改进的具体实施方式,支架2上对应连杆4的外侧还设置有第二紧固件32,第二紧固件32在抵住连杆4外侧时限制连杆4的向外运动。
22.如图2所示,进一步设置第二紧固件32,来提高调节侧滑轮21使用时的稳定性。第二紧固件32在抵向连杆4外侧后,连杆4就无法向外运动,就算第一紧固件31出现意外而松动,连杆4也无法向外活动,进而做到了滑轮21对竖梁夹持结构配合的双保险,不会产生脱落的可能。作为优选,第二紧固件32可对应设置在调节侧滑轮21的侧边,数量对应,提高限位效果。在需要拆卸时,先将第二紧固件32调整至远离连杆4,之后松开第一紧固件31,就能对连杆4进行调节。
23.作为一种改进的具体实施方式,支架2上设置有安装块20,第二紧固件32为螺栓,第二紧固件32横向旋于安装块20上,第二紧固件32旋向连杆4进行抵触限制连杆4的向外运动。
24.如图2所示,安装块20上设置螺纹孔供第二紧固件32穿设,第二紧固件32具体为螺栓,螺栓通过旋转可从安装块20伸出抵向连杆4,或收回远离连杆4,整体设置简单不占用空间,且稳定性较好便于使用。
25.作为一种改进的具体实施方式,支架2上对应第一紧固件31的外侧还设置有第二紧固件32,第二紧固件32在抵住第一紧固件31外侧时限制第一紧固件31的向外运动。
26.该种实施方式未在图中示出,在没有连杆4的情况下,进一步设置的第二紧固件32直接来抵触第一紧固件31,来提高调节侧滑轮21使用时的稳定性。第二紧固件32在抵向第一紧固件31外侧后,第一紧固件31就无法向外运动,如果第一紧固件31是旋转紧固件也就无法旋转,进而令滑轮21对竖梁夹持结构配合的稳定性较好,不会产生脱落的可能。作为优选,数量对应的第二紧固件32设置在第一紧固件31外侧,一一对应起到限位效果。在需要拆卸时,先将第二紧固件32调整至远离第一紧固件31,之后松开第一紧固件31,就能对滑轮21和转轴22进行调节。
27.作为一种改进的具体实施方式,支架2上设置有安装块20,第二紧固件32为螺栓,第二紧固件32横向旋于安装块20上,第二紧固件32旋向第一紧固件31进行抵触限制第一紧固件31的向外运动。
28.如图2所示,安装块20上设置螺纹孔供第二紧固件32穿设,第二紧固件32具体为螺栓,螺栓通过旋转可从安装块20伸出抵向第一紧固件31,或收回远离第一紧固件31,整体设置简单不占用空间,且稳定性较好便于使用。
29.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1