一种并联机械夹爪的制作方法
本技术涉及工业机器人,尤其涉及一种并联机械夹爪。
背景技术:
1、工业机器人是在生产过程中能够有极高的效率,目前多用工业机器人搭载各种各样的夹爪对不同的工件进行夹取,在对工件进行抓取时,通过运动模块带动夹爪上的两个夹板对工件进行夹取,并带动夹取后的工件进行移动,从而完成对工件的抓取工作。传统的夹爪多是基于机械传动原理设计开发,存在着以下问题:设计过程繁琐复杂,需要大量的设计计算,延缓了研发进程,不利于开发人员进行高效的设计工作;传统夹爪多是采用刚性传动,速度过快且无缓冲的问题,在面对精密机械、易损工件的夹取过程中,存在着损坏被夹物的风险。
2、相较于传统夹爪,气动夹爪具有结构简单可靠、设计过程高效的优点,但使用气动夹爪夹取工件时,控制精度较差。
技术实现思路
1、本实用新型的目的在于提供一种并联机械夹爪,解决了使用气动夹爪夹取工件时,控制精度较差的问题。
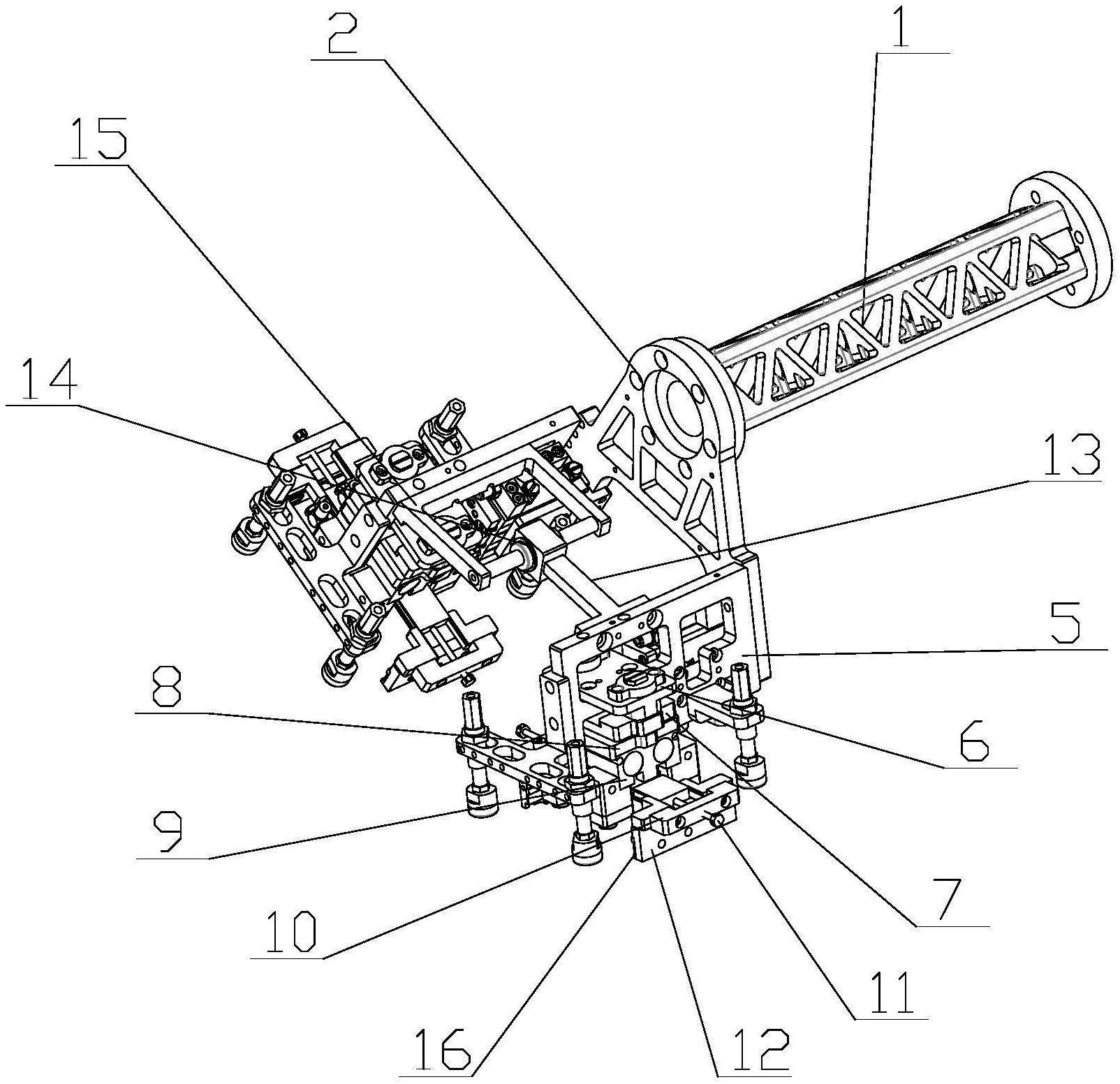
2、为实现上述目的,本实用新型采用的一种并联机械夹爪,包括连接架、并联连接框、两个连接板、连接组件、调节组件和夹爪基体,所述并联连接框与所述连接架固定连接,每个所述连接板分别与所述并联连接框固定连接,所述连接组件设置于两个所述连接板之间,所述调节组件与所述连接组件固定连接,所述连接板上设置有所述夹爪基体;
3、所述夹爪基体包括上连接件、下连接件、连接座、气动滑台、爪钩连接件和爪钩,所述上连接件与所述连接板固定连接,并贯穿所述连接板,所述下连接件与所述上连接件固定连接,并位于所述上连接件的下方,所述连接座与所述下连接件固定连接,所述气动滑台与所述连接座固定连接,并位于所述连接座的下方,所述爪钩连接件与所述气动滑台的输出端固定连接,所述爪钩连接件上设置有所述爪钩。
4、其中,所述夹爪基体还包括调节旋钮,所述调节旋钮贯穿所述爪钩。
5、其中,所述夹爪基体还包括柔性缓冲垫,所述爪钩上设置有所述柔性缓冲垫。
6、其中,所述连接组件包括安装架、直线轴承和安装杆,所述安装杆与所述连接板固定连接,所述直线轴承与所述安装杆活动连接,所述安装架与所述直线轴承固定连接。
7、其中,所述调节组件包括底座和直线滑台,所述底座与所述安装架固定连接,所述直线滑台与所述底座连接,所述连接板与所述直线滑台固定连接。
8、本实用新型的一种并联机械夹爪,所述上连接件和所述下连接件配合,使得所述连接座与所述连接板相对固定,所述连接架连接机器人的机械臂,机器人的机械臂驱动所述连接架移动,直至所述连接架移动至工件处,此时两组所述夹爪基体位于工件的两侧,所述爪钩连接件的数量为多个,所述爪钩连接件上设置有所述爪钩,所述气动滑台运作,带动所述爪钩连接件移动,从而控制所述爪钩完成直线移动,可以用所述爪钩从工件两侧向中间运动,勾取并夹紧工件,进而牢固的夹紧工件,获得提高气动夹爪在夹取工件时的精度的效果。
技术特征:
1.一种并联机械夹爪,其特征在于,
2.如权利要求1所述的并联机械夹爪,其特征在于,
3.如权利要求1所述的并联机械夹爪,其特征在于,
4.如权利要求1所述的并联机械夹爪,其特征在于,
5.如权利要求4所述的并联机械夹爪,其特征在于,
技术总结
本技术涉及工业机器人技术领域,具体涉及一种并联机械夹爪;包括连接架、并联连接框、两个连接板、连接组件、调节组件和夹爪基体,并联连接框与连接架固定连接,每个连接板分别与并联连接框固定连接,调节组件与连接组件固定连接,连接板上设置有夹爪基体,夹爪基体包括上连接件、下连接件、连接座、气动滑台、爪钩连接件和爪钩,上连接件与连接板固定连接,并贯穿连接板,下连接件与上连接件固定连接,连接座与下连接件固定连接,气动滑台与连接座固定连接,爪钩连接件与气动滑台的输出端固定连接,爪钩连接件上设置有爪钩,通过上述结构,获得提高气动夹爪在夹取工件时的精度的效果。
技术研发人员:邢富康,雷开峰,张恩山
受保护的技术使用者:深圳市智信精密仪器股份有限公司
技术研发日:20221008
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!