一种多连杆调节机构及应用其的石灰氮清炉机器人的制作方法
1.本实用新型涉及石灰氮冶炼设备技术领域,具体为一种多连杆调节机构及应用其的石灰氮清炉机器人。
背景技术:
2.石灰氮冶炼是碳化钙与氮气在1000℃高温下的氮化炉内反应来制作石灰氮的工艺,回转炉在冶炼过程中,炉内会伴随结壳的现象,因此,需要每隔一段时间对回转炉进行一起破壳清理。
3.现有清理回转窑内结壳的工作需要10-20人班组协同炉前作业,且作业过程危险系数较高,且工作效率较低。
4.并且使用常规的冲击钎杆,仅具备冲击破壳功能,但是不具备调节高度及角度的功能,通过人力调节,角度和高度受限较大,远不能达到理想的破壳范围和清渣效果。
技术实现要素:
5.为解决上述缺少用于调节冲击钎杆高度和角度的结构来完成回转窑破壳作业的问题,本实用新型提供了一种多连杆调节机构及应用其的石灰氮清炉机器人。
6.本实用新型技术方案如下:
7.一种多连杆调节机构,包括底座,所述底座的上方设置有大梁托板,所述大梁托板通过多连杆组件连接所述底座,且所述大梁托板相对于底座能够转动和升降,所述多连杆组件包括设置在底座上的转动轴,所述转动轴上设置有ac杆和ab杆,所述ac杆和ab杆远离转动轴的一端分别通过驱动器连接所述底座,且相对于转动轴能够单独转动,所述ac杆远离转动轴的一端转动连接有cd杆,所述ab杆远离转动轴的一端转动连接有大梁托板,所述cd杆远离ac杆一端同样转动连接有大梁托板。能够实现对大梁托板的升降驱动和纵向转动驱动。
8.实现上述升降驱动的具体结构为,所述ac杆两端转动中心的间距尺寸与大梁托板相对于cd杆和ab杆的转动中心的间距相同,所述ab杆两端转动中心的间距尺寸与cd杆两端转动中心的间距尺寸相同。多连杆机构构成平行四边形结构,因而能够实现通过驱动器实现对大梁托板的升降驱动。
9.作为优选,所述底座在转动轴的两侧分别设置抬低头驱动器和举升驱动器,所述抬低头驱动器能够连接驱动ac杆转动,所述举升驱动器能够连接驱动ab杆转动。纵向转动及升降区分控制,更加符合要求。
10.为了实现横向转动,所述底座的下表面设置有回转减速机。从而具备在水平方向上转动的功能。
11.为了防止部件间发生碰撞,所述多连杆组件与大梁托板间存在间隙。
12.实现上述间隙设置的具体结构为,所述cd杆通过连接件与大梁托板连接,所述大梁托板与cd杆均相对于连接件能够转动,不能移动。所述连接件为u型板,大梁托板与cd杆
分别连接两个平行的立板,即可实现间隔设置效果。
13.上述大梁托板的具体结构为,所述大梁托板包括底板,所述底板的上表面对称设置有立板,所述立板用于连接cd杆,所述底板的下表面设置有底托,所述底托用于连接ab杆。
14.作为优选,所述底托的一端设置有延长支撑部,所述延长支撑部的上表面与底板平齐。
15.作为优选,所述多连杆组件在大梁托板的两侧对称设置两组。不易出现偏心的现象。
16.一种石灰氮清炉机器人,包括上述的一种多连杆调节机构,还包括冲击钎杆,所述冲击钎杆设置在大梁托板上。冲击钎杆与大梁托板能够同步实现升降及纵向转动和横向转动等功能。
17.本实用新型的有益效果在于:本实用新型为一种多连杆调节机构及应用其的石灰氮清炉机器人,能够有效代替人力完成对石灰氮炉破壳,并且,由于回转窑的开口存在多个,且高度不同,因此冲击钎杆需要具备升降功能,并且在升降的同时,还需要能够调节纵向及横向的角度,以便能够对炉内各个位置进行破壳,通过机械结构完成上述操作,能够有效避免出现人员安全事故问题。
附图说明
18.通过阅读下文优选实施方式的详细描述,本技术的方案和优点对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本实用新型的限制。
19.在附图中:
20.图1为本实用新型多连杆调节机构结构示意图;
21.图2为本实用新型多连杆调节机构侧视结构示意图;
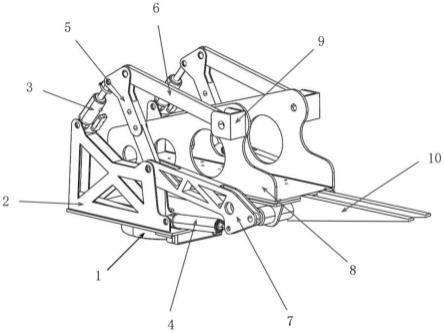
22.图3为本实用新型多连杆调节机构结构示意图(斜向上三维视图);
23.图4为本实用新型大梁托板结构示意图;
24.图5为本实用新型石灰氮清炉机器人结构示意图;
25.图中各附图标记所代表的组件为:
26.1、回转减速机;2、底座;3、抬低头驱动器;4、举升驱动器;5、ac杆;6、cd杆;7、ab杆;8、大梁托板;81、底托;82、底板;83、立板;9、连接件;10、延长支撑部;11、转动轴。
具体实施方式
27.下面将结合附图更详细地描述本公开的示例性实施方式。需要说明,提供这些实施方式是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员,可以以各种形式实现本公开,而不应被这里阐述的实施方式所限制。
28.实施例
29.如图5所示的一种石灰氮清炉机器人,包括一种多连杆调节机构,还包括冲击钎杆,所述冲击钎杆包括设置在导轨上能够移动的钎杆,所述钎杆在移动过程中,即可完成破壳作业,但是由于导轨只能单向运动,因此上述的冲击钎杆需要设置于多连杆调节机构上,
通过多连杆调节机构进行升降和角度调节,即可实现冲击钎杆的多方位移动及破壳作业,能够有效代替人力完成对回转炉的破壳作业。
30.并且,上述的一种多连杆调节机构,如图1-4所示,具体结构为:
31.包括底座2,所述底座2的上方设置有大梁托板8,上述冲击钎杆与大梁托板8的长度方向平齐,且设置在所述大梁托板8上,且能够随所述大梁托板8同步移动,所述大梁托板8通过多连杆组件连接所述底座2,通过所述多连杆组件,所述大梁托板8相对于底座2能够纵向转动和升降,与此同时,所述冲击钎杆即可实现升降和纵向转动,因此能够适用于回转炉不同高度的炉口,相应的,通过角度的调节,能够冲击炉口上方或者下方的结壳部分,从而完成破壳作业。
32.作为优选,上述结构中,所述多连杆组件在大梁托板8的两侧对称设置两组。不易出现偏心的现象,也不会出现因重量发生侧翻或者部分连杆折断的问题。
33.进一步的,上述多连杆组件的具体结构为:
34.所述多连杆组件包括设置底座2上的转动轴11,所述转动轴11并不能转动,所述转动轴11上设置有ac杆5和ab杆7,所述ac杆5和ab杆7分别通过驱动器连接所述底座2,且相对于转动轴11能够单独转动,所述驱动器包括两个,且具体的设计为:
35.所述底座2在转动轴11的两侧分别设置抬低头驱动器3和举升驱动器4,所述抬低头驱动器3能够连接驱动ac杆5转动,用于控制大梁托板8的纵向角度调节,所述举升驱动器4能够连接驱动ab杆7转动,用于控制大梁托板8的高度调节。即纵向转动及升降区分控制,更加符合要求,可以在转动的同时控制升降,也可根据需求任意选择控制升降或者角度的任意一项。
36.进一步的,所述ac杆5远离转动轴11的一端转动连接有cd杆6,所述ab杆7远离转动轴11的一端转动连接有大梁托板8,所述cd杆6远离ac杆5一端同样转动连接有大梁托板8。
37.通过上述结构即可能够实现对大梁托板8的升降驱动和纵向转动驱动。
38.并且,实现上述升降驱动的具体结构为,所述ac杆5两端转动中心的间距尺寸与大梁托板8相对于cd杆6和ab杆7的转动中心的间距相同,以ac杆5来说,预设ac杆5与转动轴11的转动中心为a点,则与cd杆6连接的转动中心则为c点,而cd杆与大梁托板8的转动连接点为d,所述ab杆7与大梁托板8的转动连接点为b点,则可以认为ac的长度与bd的长度相同;
39.与此同时,所述ab杆7两端转动中心的间距尺寸与cd杆6两端转动中心的间距尺寸相同,即ab的长度与cd的长度相同,可以认为abcd组成了平行四边形,通过多连杆机构构成平行四边形结构,因而能够实现通过驱动器实现对大梁托板8的升降驱动。
40.驱动过程为举升驱动器4收缩或者伸长,因而能够带动与之连接的ab杆7转动,在ab杆7转动的同时,由于ac杆5不会转动,且长度不变,因此,cd杆6会配合完成转动,平行的两边同时改变角度,而bd长度随ac长度角度相同不变,因此,大梁托板8只会升降,而不会出现角度变换,从而能够实现升降功能。
41.而角度转动的过程为:抬低头驱动器3伸长或收缩,带动ac杆5转动,由于ab杆7不会转动,因此cd杆6会随之移动,但始终与ab杆7保持平行,相应的,在b点不发生移动的情况下,所述d点之后前进或者后退,但是长度不变,相应的,db连线就会转动,相应的,能够大梁托板8就会随之转动,从而实现纵向转动功能。
42.通过上述结构即可看出,冲击钎杆能够在纵向平面进行调节,且高度能够随之改
变,即可完成上述作业功能。
43.作为优选,为了实现对回转窑侧边的结壳处理,还需要横向转动功能,因此,所述底座2的下表面设置有回转减速机1。从而具备在水平方向上转动的功能。
44.上述结构中,为了避免出现部件间发生碰撞的问题,所述多连杆组件与大梁托板8间存在间隙。
45.且实现上述间隙设置的具体结构为,所述cd杆6通过连接件9与大梁托板8连接,所述大梁托板8与cd杆6均相对于连接件9能够转动,不能移动。所述连接件9为u型板,大梁托板8与cd杆6分别连接两个平行的立板83,即可实现间隔设置效果。但是并不影响实际应用。
46.最后,如图4所示,上述大梁托板8的具体结构为,所述大梁托板8包括底板82,所述底板82的上表面对称设置有立板83,所述立板83用于连接cd杆6,所述底板82的下表面设置有底托81,所述底托81用于连接ab杆7。所述底托81能够有效提升底板82的强度。
47.且进一步的,为了表面出现钎杆长度过大,导致底板82连接部出现不稳定的问题,所述底托81的一端设置有延长支撑部10,所述延长支撑部10的上表面与底板82平齐。能够延伸并支撑所述钎杆的导轨,从而避免出现过强的悬臂效应。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1