一种智能分拣配送医疗机器人的制作方法
本技术涉及机器人,具体涉及一种智能分拣配送医疗机器人。
背景技术:
1、随着机器人技术的不断发展和应用,机器人的优点越来越凸显。特别是在移动搬运机器人领域,将机器人引入到工业生产中来代替人工劳动已成为一种不可阻挡的趋势。移动机器人在医院环境中支持医务人员方面发挥着越来越大的作用,除其他职责外,移动机器人还用于管理医院环境中必需品的分配。机器人需要在规定的场地中通过工作订单板读取/解析任务信息,以自主控制模式运动,控制各种在不同初始位置的目标对象(立方体/病床),并将它们运送到场地中不同目的地。
2、现有的搬运机器人多数为单一式,利用机器人取一个物品,不配备抓取机构,需要借助其它机械手或物料流水线装载物料,因此本身不具备分拣功能。而配备机械手的分拣机器人多为大体积、高成本机器人,不满足世界技能大赛小型化,低成本的要求,也不能在较为狭小的实际场景中应用。
技术实现思路
1、本实用新型的目的在于提出一种智能分拣配送医疗机器人,能以较小体积和动力使机器人在狭窄空间,完成分拣药品和搬运药品的操作。
2、为解决上述技术问题,本实用新型所采用的技术方案为:
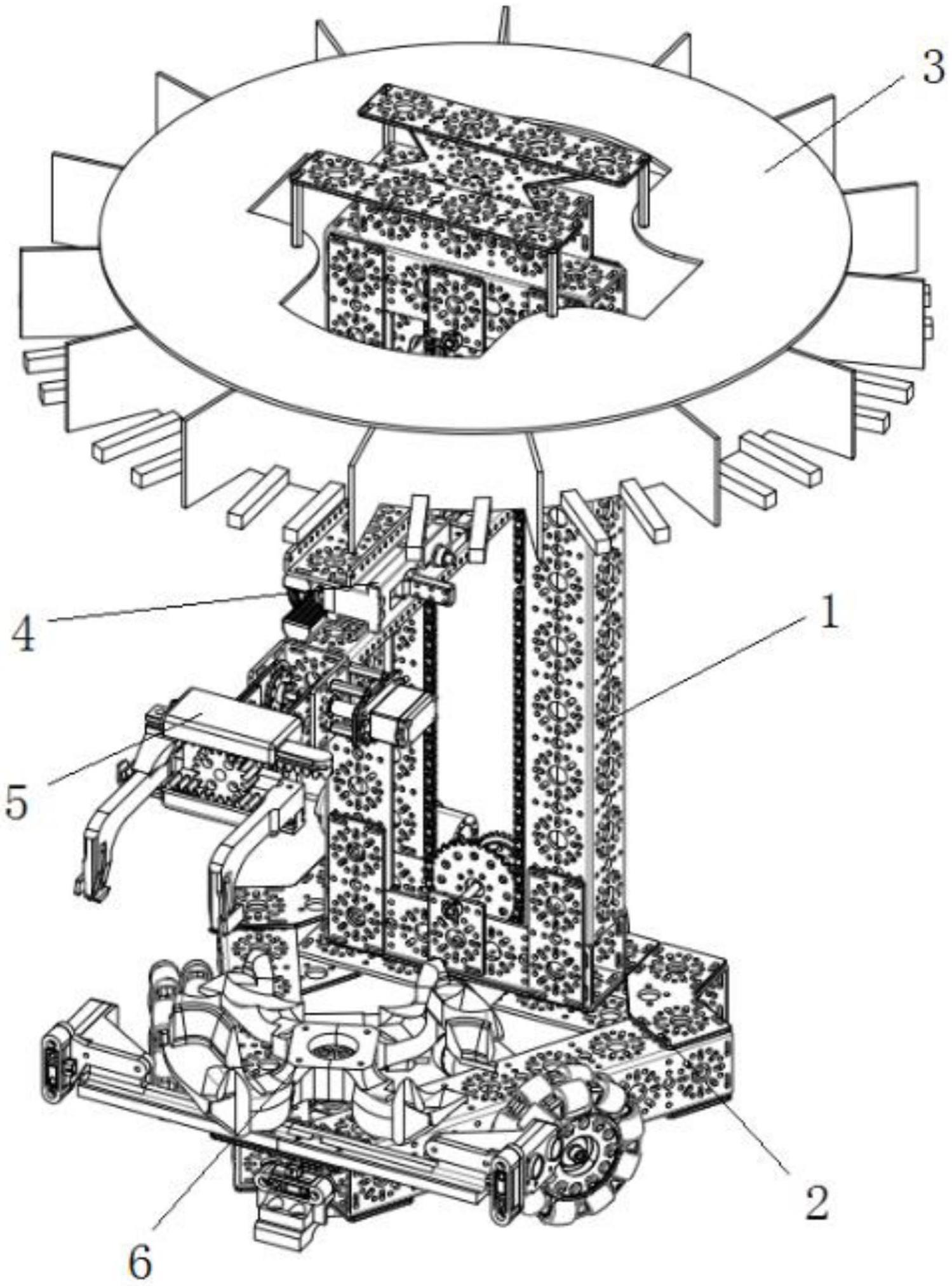
3、一种智能分拣配送医疗机器人,包括躯干机构、设置在躯干机构底部的底盘行走机构、以及设置在躯干机构顶部的药品存放机构,还包括通过升降机构驱动沿躯干机构上下方向移动的伸缩臂机构,所述伸缩臂机构的伸缩末端设置有用于分拣药品的夹手机构,所述夹手机构抓取药品、并将药品放入所述药品存放机构内。
4、进一步的,所述躯干机构包括竖直立设在底盘行走机构上的主躯干,所述主躯干内设置有安装所述升降机构的安装空间,所述升降机构包括设置在所述主躯干下部的升降电机,所述升降电机通过齿轮驱动链条运转,所述链条通过齿轮竖向安装在安装空间内,所述链条一侧与升降底座固定连接,所述升降底座的两侧与所述主躯干连接且两者为滑动连接,所述伸缩臂机构设置在所述升降底座上。
5、进一步的,所述夹手机构包括夹手装载件、可活动安装在夹手装载件上的左夹手、右夹手,所述左夹手、右夹手通过驱动组件驱动相向或相背移动做夹紧动作,所述夹手装载件后侧固定设置有铰接段,所述铰接段与固定段铰接,所述固定段固定在所述伸缩臂机构的伸缩末端,所述固定段外侧设置有驱动所述铰接段转动的翻转电机。
6、进一步的,所述夹手装载件为一侧具有开口的“c”字型结构,所述夹手装载件上下两内侧对称设置有横向导轨,所述横向导轨与上齿条、下齿条连接且两者为滑动连接,所述左夹手、右夹手分别设置在所述上齿条、下齿条外侧。
7、进一步的,所述驱动组件包括有通过安装座安装在夹手装载件背部的夹紧电机,所述夹紧电机输出轴穿设所述夹手装载件的一端与驱动齿轮连接,所述驱动齿轮容置在所述夹手装载件开口内,所述上齿条、下齿条相对的一侧设置有齿纹,所述驱动齿轮上下两端分别与所述上齿条、下齿条的齿纹啮合连接。
8、进一步的,所述药品存放机构包括通过转动组件可转动设置在所述主躯干顶部的转环,所述转环的外周侧间隔均匀设置有隔板,两个相邻的隔板之间形成一个药品存放位,两个相邻的隔板之间的转环外壁底部上横置设置有药品托条。
9、进一步的,所述转动组件包括有固定设置在主躯干顶部的安装架,所述安装架底部竖直设置有旋转电机,所述转动电机输出轴与连接架固定连接,所述连接架四周与所述盖板固定连接,所述盖板盖设在所述转环上。
10、进一步的,所述底盘行走机构包括有底盘、三个呈120°分布设置在底盘上的行走电机,每一行走电机的输出轴与一万向轮连接。
11、进一步的,所述底盘上设置有传感器固定器,所述传感器固定器上设置有红外线传感器、超声波传感器、以及qti传感器。
12、进一步的,所述底盘上可转动设置有病床转盘,所述病床转盘通过病床电机驱动转动。
13、与现有技术相比,本实用新型具有如下有益效果:
14、本实用新型提出了一种智能分拣配送医疗机器人,设置躯干机构、底盘行走机构、药品存放机构、伸缩臂机构、夹手机构、升降机构,在使用时,可通过所述底盘行走机构驱动整体到达指定药品位置,利用所述伸缩臂机构驱动伸出夹手机构,通过夹手机构即可夹紧指定药品,并将药品放置在药品存放机构,可同时存储多个药品,本实用新型能以较小体积和动力使机器人在狭窄空间,完成分拣药品和搬运药品的操作。
技术特征:
1.一种智能分拣配送医疗机器人,其特征在于,包括躯干机构(1)、设置在躯干机构(1)底部的底盘行走机构(2)、以及设置在躯干机构(1)顶部的药品存放机构(3),还包括通过升降机构驱动沿躯干机构(1)上下方向移动的伸缩臂机构(4),所述伸缩臂机构(4)的伸缩末端设置有用于分拣药品的夹手机构(5),所述夹手机构(5)抓取药品、并将药品放入所述药品存放机构(3)内。
2.根据权利要求1所述的一种智能分拣配送医疗机器人,其特征在于,所述躯干机构(1)包括竖直立设在底盘行走机构(2)上的主躯干(11),所述主躯干(11)内设置有安装所述升降机构的安装空间,所述升降机构包括设置在所述主躯干(11)下部的升降电机(12),所述升降电机(12)通过齿轮驱动链条(13)运转,所述链条(13)通过齿轮竖向安装在安装空间内,所述链条(13)一侧与升降底座(14)固定连接,所述升降底座(14)的两侧与所述主躯干(11)连接且两者为滑动连接,所述伸缩臂机构(4)设置在所述升降底座(14)上。
3.根据权利要求2所述的一种智能分拣配送医疗机器人,其特征在于,所述夹手机构(5)包括夹手装载件(51)、可活动安装在夹手装载件(51)上的左夹手(57)、右夹手(59),所述左夹手(57)、右夹手(59)通过驱动组件驱动相向或相背移动做夹紧动作,所述夹手装载件(51)后侧固定设置有铰接段(52),所述铰接段(52)与固定段(53)铰接,所述固定段(53)固定在所述伸缩臂机构(4)的伸缩末端,所述固定段(53)外侧设置有驱动所述铰接段(52)转动的翻转电机(54)。
4.根据权利要求3所述的一种智能分拣配送医疗机器人,其特征在于,所述夹手装载件(51)为一侧具有开口的“c”字型结构,所述夹手装载件(51)上下两内侧对称设置有横向导轨(55),所述横向导轨(55)与上齿条(56)、下齿条连接且两者为滑动连接,所述左夹手(57)、右夹手(59)分别设置在所述上齿条(56)、下齿条外侧。
5.根据权利要求4所述的一种智能分拣配送医疗机器人,其特征在于,所述驱动组件包括有通过安装座安装在夹手装载件(51)背部的夹紧电机,所述夹紧电机输出轴穿设所述夹手装载件(51)的一端与驱动齿轮(58)连接,所述驱动齿轮(58)容置在所述夹手装载件(51)开口内,所述上齿条(56)、下齿条相对的一侧设置有齿纹,所述驱动齿轮(58)上下两端分别与所述上齿条(56)、下齿条的齿纹啮合连接。
6.根据权利要求5所述的一种智能分拣配送医疗机器人,其特征在于,所述药品存放机构(3)包括通过转动组件可转动设置在所述主躯干(11)顶部的转环(33),所述转环(33)的外周侧间隔均匀设置有隔板(35),两个相邻的隔板(35)之间形成一个药品存放位,两个相邻的隔板(35)之间的转环(33)外壁底部上横置设置有药品托条(36)。
7.根据权利要求6所述的一种智能分拣配送医疗机器人,其特征在于,所述转动组件包括有固定设置在主躯干(11)顶部的安装架(31),所述安装架(31)底部竖直设置有旋转电机(37),所述旋转电机(37)输出轴与连接架(32)固定连接,所述连接架(32)四周与盖板(34)固定连接,所述盖板(34)盖设在所述转环(33)上。
8.根据权利要求7所述的一种智能分拣配送医疗机器人,其特征在于,所述底盘行走机构(2)包括有底盘(21)、三个呈120°分布设置在底盘(21)上的行走电机(22),每一行走电机(22)的输出轴与一万向轮(23)连接。
9.根据权利要求8所述的一种智能分拣配送医疗机器人,其特征在于,所述底盘(21)上设置有传感器固定器(24),所述传感器固定器(24)上设置有红外线传感器(25)、超声波传感器(26)、以及qti传感器(27)。
10.根据权利要求9所述的一种智能分拣配送医疗机器人,其特征在于,所述底盘(21)上可转动设置有病床转盘(6),所述病床转盘(6)通过病床电机(7)驱动转动。
技术总结
一种智能分拣配送医疗机器人,涉及机器人技术领域,包括躯干机构、设置在躯干机构底部的底盘行走机构、以及设置在躯干机构顶部的药品存放机构,还包括通过升降机构驱动沿躯干机构上下方向移动的伸缩臂机构,所述伸缩臂机构的伸缩末端设置有用于分拣药品的夹手机构,所述夹手机构抓取药品、并将药品放入所述药品存放机构内。本技术能以较小体积和动力使机器人在狭窄空间,完成分拣药品和搬运药品的操作。
技术研发人员:陈源旭,罗科,张明豪,陈泽齐,曾坚峰,何福辉
受保护的技术使用者:广州慧谷动力科技有限公司
技术研发日:20221021
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!