一种移动机械臂的制作方法
本技术涉及机械臂领域,特别涉及一种移动机械臂。
背景技术:
1、在当前的自动化生产过程当中,机械臂起到至关重要的作用,它替代人工的同时也更高效迅速。
2、当大的机械臂在生产过程中意外损坏会造成生产停滞,则需要使用临时的机械臂进行替代,因大机械臂维修需耗费较长时间,因此急需能够快速进行安装以及拆卸的小型机械臂进行暂时替代,以防止生产停滞。
3、传统的机械臂使用旋转气缸带动机械臂的一端转动从而带动机械臂的另一端上下移动,需要的旋转气缸的力矩较大,且控制精度不够准确。
4、专利cn103302675a采用直线气缸驱动机械臂上下移动,在需要提升的物体较重时又由于机械臂较长,需要的直线气缸的驱动力较大,且机械臂承受的拉应力较大,容易损坏。
技术实现思路
1、为克服上述缺点,本实用新型的目的在于提供一种临时替代大机械臂,减小直线气缸的驱动力,减小机械臂拉应力的移动机械臂。
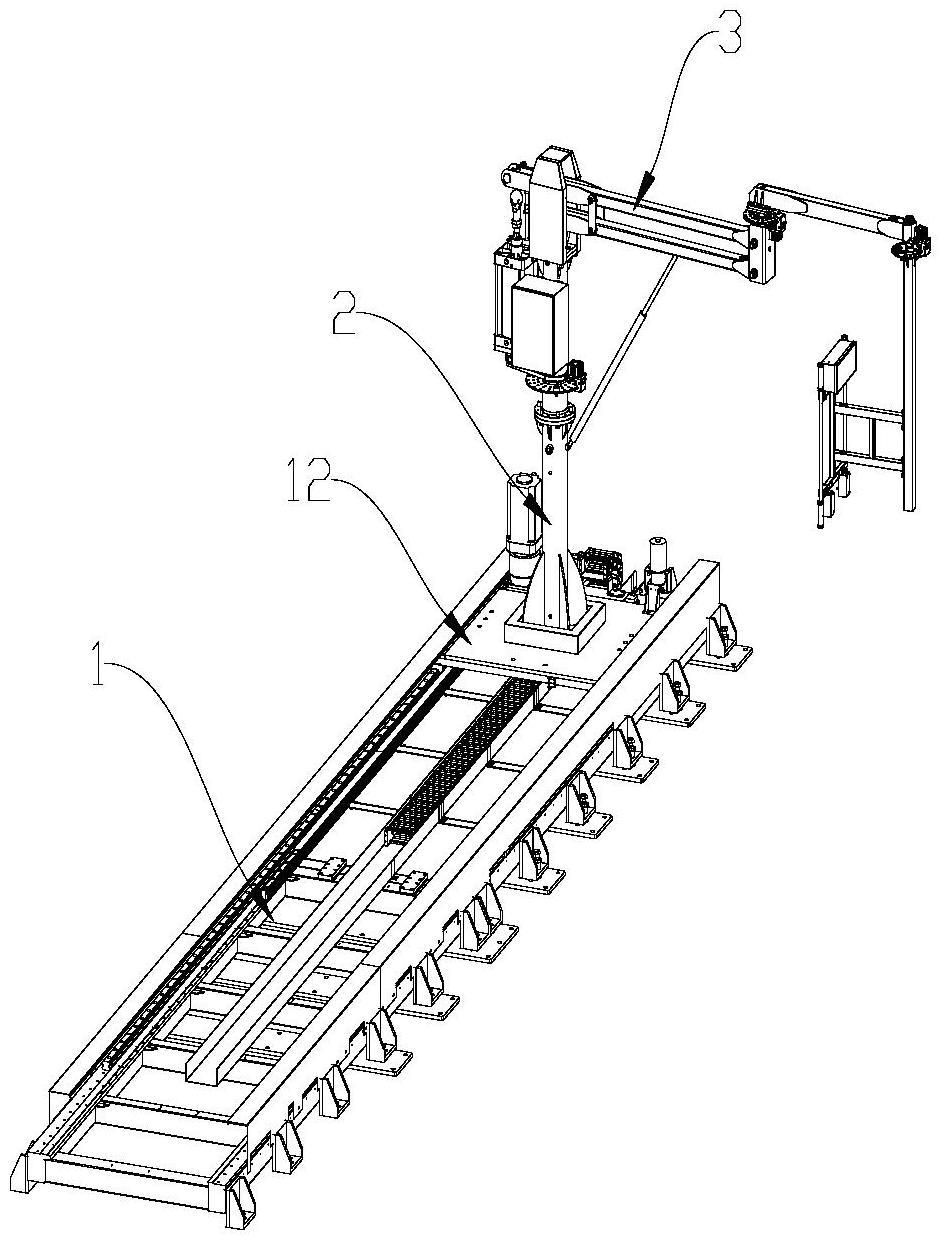
2、为了达到以上目的,本实用新型采用的技术方案是:一种移动机械臂,包括地轨机构,所述地轨机构上固定连接有支撑柱组件,所述支撑柱组件上设置有助力臂机构,所述助力臂机构包括第一助力臂组件和设置在第一助力臂组件上的第二助力臂组件;所述地轨机构用于带动助力臂机构水平移动,从而带动待移动物水平移动,所述支撑柱组件用于支撑助力臂机构,使得助力臂机构处于一定的高度。
3、所述第一助力臂组件包括与支撑柱组件转动连接的第一转动轴,所述第一转动轴上固定连接有第一气缸和第一固定座,所述第一气缸的驱动轴上铰接有第一助力臂,所述第一助力臂通过连接轴与第一固定座铰接,所述第一固定座设置在第一助力臂靠近第一气缸的一端,所述第一气缸伸出较短的距离就可以带动助力臂机构上下移动较长的距离,所述第一气缸只需很小的距离就能在助力臂组件的末端上下移动很大的距离。所述第一转动轴使得第一助力臂组件可以相对于支撑柱组件360度旋转,增大了待移动物移动的范围。
4、所述支撑柱组件上设置有用于支撑第一助力臂的支撑气缸,所述支撑气缸的固定端与支撑柱组件转动连接,所述支撑气缸的驱动轴与第一助力臂的下端转动连接,所述支撑气缸用于支撑第一助力臂机构,增加机械臂机构的支撑能力,减小了第一气缸需要输出的力,减小了第一助力臂的拉应力,降低了第一助力臂损坏的风险,提高了第一助力臂的使用寿命,使得机械臂机构可以提升更重的物体。所述第一气缸伸缩时所述支撑气缸相对应的伸缩,所述第一气缸伸长时所述支撑气缸缩回,所述第一气缸缩回时所述支撑气缸伸出。
5、工作原理:所述地轨机构带动待移动物水平移动,到达指定位置后,所述第一气缸伸出带动第一助力臂靠近第一气缸的一端向上移动,由于杠杆原理(所述第一助力臂与第一固定座铰接),所述第一助力臂靠近第二助力臂组件的一端向下移动,同时所述支撑气缸缩回带动第一助力臂向下移动,从而带动待移动物向下移动;相反,所述第一气缸缩回带动第一助力臂靠近第一气缸的一端向下移动,由于杠杆原理所述第一助力臂靠近第二助力臂组件的一端向上移动,同时所述支撑气缸伸出向上顶升第一助力臂,从而带动待移动物向上移动到指定位置。
6、进一步的是:所述第一助力臂的下方设置有辅助力臂,所述辅助力臂通过连接轴与第一固定座转动连接,所述辅助力臂远离第一气缸的一端上设置有第二固定座,所述第一助力臂与辅助力臂均与第二固定座铰接,所述第一助力臂与辅助力臂通过连接片连接。所述辅助力臂用于辅助第一助力臂支撑物体,增大了本机械臂支撑物体的能力。
7、进一步的是:所述支撑柱组件包括可拆卸连接的第一支撑柱和第二支撑柱,使得本机械臂安装和拆卸方便,所述第二支撑柱通过轴承与第一转动轴连接。
8、进一步的是:所述第一转动轴的外表面连接有第一转动盘,所述第一转动盘的一侧设置有用于控制第一转动盘是否转动的第一制动气缸,所述第一转动盘与第一转动轴固定连接,所述第一转动轴和第一转动盘一起转动,所述第一制动气缸用于控制第一转动盘是否转动。本移动机械臂还包括控制组件,所述控制组件包括控制器,所述第一制动气缸与控制器电气连接。
9、工作原理:当地轨机构需要带动助力臂机构水平移动时,所述控制器控制第一制动气缸带动驱动轴伸出,所述第一制动气缸的驱动轴与第一转动盘接触,使得第一转动盘停止旋转,从而使得第一转动轴停止转动,防止本移动机械臂在水平移动时所述第一助力臂组件转动,避免发生碰撞;当地轨机构带动机械臂机构移动到指定位置处,所述控制器驱动第一制动气缸缩回,使得其驱动轴与第一转动盘不接触,从而使得第一转动盘和第一转动轴可以转动。
10、进一步的是:所述第二助力臂组件包括转动连接在第二固定座上的第二转动轴,所述第二转动轴使得第二助力臂可以在第二固定座上自由转动,增大了待移动物可以移动的范围,所述第二转动轴上固定连接有第二助力臂,所述第二转动轴的外表面设置有第二转动盘,所述第二转动盘的一侧设置有用于控制第二转动盘是否转动的第二制动气缸,所述第二制动气缸与控制器电气连接,所述第二制动气缸用于控制第二转动盘是否转动,从而控制第二转动轴是否转动。
11、当地轨机构需要带动待移动物水平移动时,所述控制器控制第二制动气缸伸出,使得其驱动轴与第二转动盘接触,使得第二转动盘停止转动,从而使得第二转动轴停止转动,防止待移动物在地轨带动其水平移动的过程中发生碰撞,当地轨机构带动待移动物停止移动时所述控制器控制第二制动气缸缩回,所述第二制动气缸与第二转动盘不接触,所述第二转动盘和第二转动轴可以转动。
12、进一步的是:所述第二助力臂远离第一助力臂组件的一端上通过第三转动轴连接有手持扶杆,所述第三转动轴使得手持扶杆可以自由转动,所述第三转动轴的外表面设置有第三转动盘,所述第三转动盘的一侧设置有用于控制第三转动盘是否转动的第三制动气缸,所述第三制动气缸与控制器电气连接,所述第三制动气缸用于控制第三转动盘从而控制第三转动轴是否转动。所述手持扶杆上设置有用于取放待移动物的夹具。地轨机构带动机械臂机构移动到指定位置时,人工手持并拖拽手持扶杆使得待移动物移动到指定位置处。
13、进一步的是:所述地轨机构包括地轨、安装板和用于驱动安装板水平移动的动力组件,所述支撑柱组件固定连接在安装板上。所述动力组件带动安装板水平移动,从而带动待移动物水平移动。
14、进一步的是:所述动力组件包括电机,所述电机的驱动轴上连接有齿轮,所述齿轮一侧啮合连接有齿条。所述电机转动带动齿轮转动,所述齿轮沿着齿条转动产生推力,推动安装板水平移动,进而带动机械臂机构和待移动物水平移动。
15、进一步的是:所述地轨上对称设置有滑轨,所述安装板上对称设置有滑块,所述滑轨和滑块滑动连接,所述滑轨和滑块用于引导安装板水平移动,防止安装板在移动的过程中跑偏。
16、本实用新型的有益效果是,本技术中动力臂机构安装在地轨上,实现了动力臂机构前后移动的功能,气缸能够驱动助力臂上下移动,同时助力臂通过连接轴实现左右方向的自由转动,使得待移动物移动的范围更广。本技术只需一名操作人员即可实行作业,可在大机器人出现故障时暂代机械臂进行生产,减少因机械臂故障产生的损失,且投入成本低,节省人力物力,安装方便快捷且适用范围较广。本技术中的支撑气缸用于支撑第一助力臂机构,增加机械臂机构的支撑能力,减小了第一气缸需要输出的力,减小了第一助力臂的拉应力,降低了第一助力臂损坏的风险,提高了第一助力臂的使用寿命,使得机械臂机构可以提升更重的物体。
- 还没有人留言评论。精彩留言会获得点赞!