一种工业机器人原点快速校正装置的制作方法
1.本实用新型涉及校正装置技术领域,具体地说是一种工业机器人原点快速校正装置。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。因其安装精度高、灵活性大等特点,工业机器人在装配线大量使用。
3.工业机器人通过初期调试,设定各轴坐标,按照既定轨迹运动,通过程序控制末端机器人夹爪闭合,完成高精度装配过程。在产线日常生产中,因工业机器人的使用,使得产线产量加大,产线稳定性也得到提升。但同时,由于工业机器人各轴机械部件长时间使用磨损,或是由于意外导致的机器人撞机,从而引发的机器人原点出现偏差或者丢失的情况,需要维护人员耗费大量时间,进行手动校正。
4.因此,需要设计一种工业机器人原点快速校正装置,以快速解决因机器人原点偏差或丢失问题。
技术实现要素:
5.本实用新型的目的是克服现有技术的不足,提供了一种工业机器人原点快速校正装置,以快速解决因机器人原点偏差或丢失问题。
6.为了达到上述目的,本实用新型提供一种工业机器人原点快速校正装置,包括标定杆、标定底座、定位销、基台底座、快插销、标定块,标定底座安装在基台底座的顶部,标定底座与基台底座之间采用快插销固定,标定底座的侧面设有标定槽,标定槽的顶部设有通孔,标定块的一端固定在机器人末端机构上,标定块的另一端插入标定槽内,标定杆穿过标定槽的通孔以及标定块表面的圆孔。
7.所述的基台底座的顶部设有定位销,定位销插入标定底座的定位孔内。
8.所述的标定块固定在机器人末端机构的卡爪位置处。
9.所述的标定块与机器人末端机构之间采用紧固件固定。
10.本实用新型同现有技术相比,设计了工业机器人原点快速校正装置,通过标定杆穿过标定槽的通孔以及标定块表面的圆孔,实现机器人原点精准定位,快速解决因机器人原点偏差或丢失问题。本实用新型可操作性、可复制性强,结构简单,加工方便,稳定可靠。
附图说明
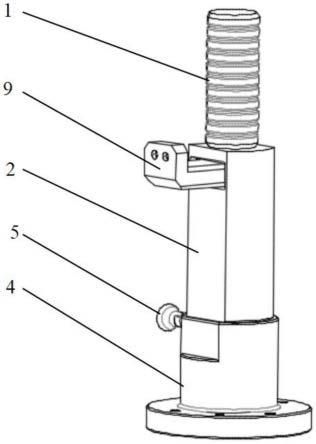
11.图1为本实用新型的轴测图。
12.图2为本实用新型与机器人末端机构的爆炸图。
13.图3为本实用新型的工作示意图。
具体实施方式
14.现结合附图对本实用新型做进一步描述。
15.参见图1、图2,本实用新型提供一种工业机器人原点快速校正装置,包括标定杆、标定底座、定位销、基台底座、快插销、标定块,标定底座2安装在基台底座4的顶部,标定底座2与基台底座4之间采用快插销5固定,标定底座2的侧面设有标定槽,标定槽的顶部设有通孔,标定块9的一端固定在机器人末端机构7上,标定块9的另一端插入标定槽内,标定杆1穿过标定槽的通孔以及标定块9表面的圆孔。
16.为了便于确定标定底座2的固定位置,基台底座4的顶部设有定位销3,定位销3插入标定底座2的定位孔内。
17.本实用新型在安装标定块9时,先拆卸机器人末端机构7上的卡爪8,将标定块9固定在机器人末端机构7的卡爪8位置处,且标定块9与机器人末端机构7之间采用紧固件6固定。
18.本实用新型在工作时,编写设定机器人标定程序,并保存记录使用;当机器人出现原点丢失的时候,通过机器人的零点标尺找到粗定位;在机器人末端机构7安装标定块9,在粗定位处安装基台底座4;执行机器人标定程序,到位后记录当前机器人各轴位置,再通过调整丢失轴运动到达标定底座2预定位置,标定块9插入标定槽内,标定杆1穿过标定槽的通孔以及标定块9表面的圆孔,此时,机器人的位置即为机器人原点。记录调整后的各轴位置,计算轴偏差,将偏差数据进行原点换算后,输入进去新的原点数据即可。最后,再次执行标定程序,验证数据有效性。
19.本实用新型设计了工业机器人原点快速校正装置,通过标定杆穿过标定槽的通孔以及标定块表面的圆孔,实现机器人原点精准定位,快速解决因机器人原点偏差或丢失问题。本实用新型可操作性、可复制性强,结构简单,加工方便,稳定可靠。
技术特征:
1.一种工业机器人原点快速校正装置,包括标定杆、标定底座、定位销、基台底座、快插销、标定块,其特征在于:标定底座(2)安装在基台底座(4)的顶部,标定底座(2)与基台底座(4)之间采用快插销(5)固定,标定底座(2)的侧面设有标定槽,标定槽的顶部设有通孔,标定块(9)的一端固定在机器人末端机构(7)上,标定块(9)的另一端插入标定槽内,标定杆(1)穿过标定槽的通孔以及标定块(9)表面的圆孔。2.根据权利要求1所述的一种工业机器人原点快速校正装置,其特征在于:所述的基台底座(4)的顶部设有定位销(3),定位销(3)插入标定底座(2)的定位孔内。3.根据权利要求1所述的一种工业机器人原点快速校正装置,其特征在于:所述的标定块(9)固定在机器人末端机构(7)的卡爪(8)位置处。4.根据权利要求1所述的一种工业机器人原点快速校正装置,其特征在于:所述的标定块(9)与机器人末端机构(7)之间采用紧固件(6)固定。
技术总结
本实用新型涉及校正装置技术领域,具体地说是一种工业机器人原点快速校正装置,包括标定杆、标定底座、定位销、基台底座、快插销、标定块,标定底座安装在基台底座的顶部,标定底座与基台底座之间采用快插销固定,标定底座的侧面设有标定槽,标定槽的顶部设有通孔,标定块的一端固定在机器人末端机构上,标定块的另一端插入标定槽内,标定杆穿过标定槽的通孔以及标定块表面的圆孔。本实用新型同现有技术相比,设计了工业机器人原点快速校正装置,通过标定杆穿过标定槽的通孔以及标定块表面的圆孔,实现机器人原点精准定位,快速解决因机器人原点偏差或丢失问题。本实用新型可操作性、可复制性强,结构简单,加工方便,稳定可靠。稳定可靠。稳定可靠。
技术研发人员:靳亚东 刘勇 刘文凯 于亚朋 牟永祥
受保护的技术使用者:博世华域转向系统(烟台)有限公司
技术研发日:2022.10.25
技术公布日:2023/3/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1